

Часть2, рефераты / Вопросы / vopros_30
.docxНазначение. Тахогенераторы применяют в автоматических устройствах для преобразования механического вращения в электрический сигнал. В идеальном случае тахогенератор должен давать на выходе напряжение, пропорциональное частоте вращения:
U = kп или U = kdθ/dt,
где n — частота вращения, об/мин; θ — угол, на который перемещается вал механизма, связанного с тахогенератором. Эту зависимость, являющуюся основной, называют выходной характеристикой тахогенератора.
Тахогенераторы предназначены для следующих целей: измерения частоты вращения; выработки ускоряющих и за-медляющих сигналов; выполнения операции дифференцирования и интегрирования в схемах счетно-решающих устройств. Требования, предъявляемые к точности тахогенератора, различны в зависимости от условий работы. При измерении частоты вращения требуется сравнительно невысокая точность; обычно допустима погрешность 1 - 2,5 %. Наибольшую точность должны иметь тахогенераторы, работающие в качестве дифференцирующих и интегрирующих звеньев в вычислительных устройствах. При этом ошибка в линейности выходной характеристики не должна превышать 0,05 — 0,1 % по амплитуде и 0,1 % по фазе.
Принцип действия. Конструкция асинхронного тахогенератора аналогична конструкции асинхронного исполнительного
-
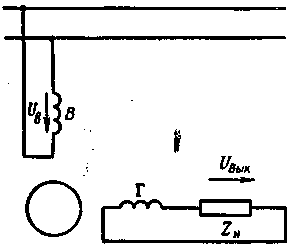
Рисунок 3.1 Схема асинхронного тахогенератора
двигателя с полым немагнитным ротором. На статоре в пазах уложены две обмотки, сдвинутые в пространстве на 90°. Одна из обмоток В(возбуждения) постоянно включена в сеть, другая обмотка Г (генераторная) присоединена к нагрузке Zн (рис. 3.1), т. е. является выходной.
По обмотке В проходит переменный ток, в результате чего создается магнитный поток Фd , пульсирующий с частотой сети f1 . Этот поток распределен в пространстве практически синусоидально и его ось совпадает с осью обмотки возбуждения (рис. 3.2, а), называемойпродольной осью d-d. Соответственно поток, создаваемый обмоткой возбуждения, называют продольным. Ось q-q, перпендикулярную оси обмотки возбуждения, называют поперечной.
|
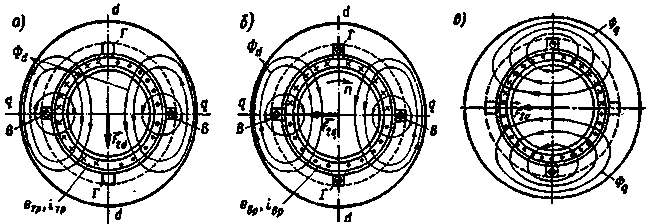
Рис. 3.2. Характер распределения ЭДС и токов в роторе, индуцируемых в результате пульсации потока Фd и вращения ротора |
При неподвижном роторе магнитный поток Фd пронизывает обмотку возбуждения В, индуцируя в ней ЭДС
Ев = 4,44f1 wв ko6.в Фdm ,
где wв и ko6.в — число витков и обмоточный коэффициент обмотки возбуждения.
В идеальном случае в обмотке Г продольный поток Фd не индуцирует ЭДС, так как обмотка Гсдвинута относительно обмотки В на 90°. Следовательно, равно нулю и напряжение на нагрузке. Однако практически точной магнитной симметрии осей указанных обмоток достигнуть невозможно; поэтому часть потока Фd оказывается трансформаторно связанной с обмоткой Г и индуцирует в ней некоторую ЭДС, называемую остаточной.
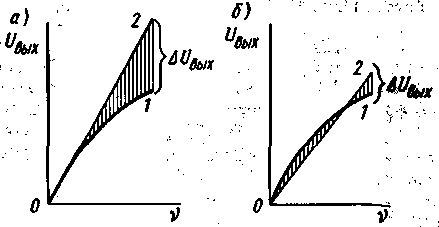
В идеализированном тахогенераторе (при принятых допущениях) ЭДС в выходной обмотке прямо пропорциональна частоте вращения ротора. Иными словами, его выходная характеристика Uвых = f(v) является линейной (рис.5.19, а, кривая 2). В реальных условиях работы тахогенератора указанная характеристика отклоняется от линейной зависимости (кривая 1),т. е. появляется амплитудная погрешность ΔUвых.
|
Рис. 5.19. Выходные характеристики некалиброванного (а)и калиброванного (б) асинхронного тахогенератора |
Причины погрешностей. Основным показателем качества работы тахогенератора является линейность выходной характеристики. Причинами, вызывающими погрешности тахогенератора, т. е. отклонение выходной характеристики от линейной зависимости, являются:
а) технологические неточности при изготовлении;
б) электромагнитная реакция ротора, изменяющая значения потоков Фd и Фq при изменении режима работы тахогенератора (частоты вращения и нагрузки).
в) изменение некоторых параметров при изменении частоты вращения (например, сопротивления полого ротора);
г) изменение сопротивления обмоток и магнитного сопротивления по различным осям под влиянием температуры, насыщения и др.
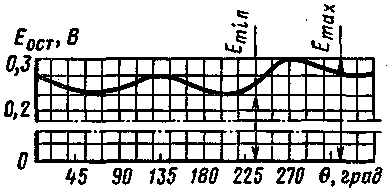
Из-за технологических неточностей при изготовлении тахогенераторов [отклонений обмоток статора В и Г от взаимно перпендикулярного положения, допусков в величине воздушного зазора и толщине полого ротора (рис. 5.18)] в выходной обмотке при частоте вращения ротора, равной нулю, индуцируется некоторая остаточная ЭДС Еост , называемая нулевым сигналом. Примерный характер ее изменения в зависимости от угла поворота ротора θ показан на рис. 5.20. Нулевой сигнал, обусловленный неточным взаимным расположением обмоток В и Г, можно уменьшить, если обмотку возбуждения расположить на внешнем статоре, а выходную обмотку — на внутреннем (рис. 5.21, а). Это дает возможность настроить тахогенератор на минимальный нулевой сигнал путем поворота внутреннего статора и установки его в такое положение, при котором остаточная ЭДС в выходной обмотке минимальна.
Рис. 5.20. Зависимость нулевого сигнала от угла поворота ротора |
|
|
Рис. 5.21. Схемы для способов уменьшения нулевого сигнала |
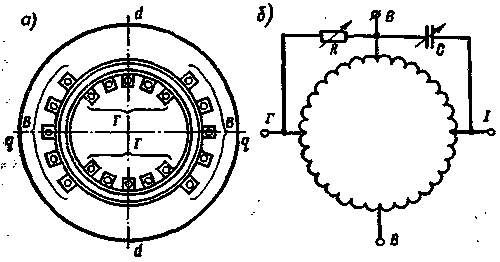
Другим способом уменьшения нулевого сигнала является включение обмоток статора по мостовой схеме (рис. 5.21,б). В этом случае между зажимами В и Г включают компенсирующее устройство, состоящее из емкости С и активного сопротивления R, значение которых подбирают так, чтобы в выходной обмотке индуцировалась минимальная остаточная ЭДС. Полностью устранить нулевой сигнал указанными способами не удается из-за технологических допусков в величине воздушного зазора и толщине полого ротора. Обычно при настройке тахогенератора стремятся получить минимальный нулевой сигнал для различных положений ротора.
Уравнение выходной характеристики. Это уравнение можно получить путем разложения пульсирующего поля обмотки возбуждения на вращающиеся поля прямой и обратной последовательностей с использованием методики, примененной для анализа двухфазного исполнительного двигателя. При этом уравнение выходной характеристики в комплексной форме приобретет вид
(5.42)
Úвых = - jÚв kv /(Á - B́v2),
где v = n2 /n1 — относительная частота вращения ротора (n1 = 60f1 /p — синхронная частота вращения); Á и B́ — комплексные коэффициенты, зависящие от параметров схемы замещения тахогенератора. Из (5.42) следует, что для снижения погрешности тахогенератора, т. е. получения выходной характеристики, близкой к прямой линии, необходимо уменьшать член B́v2, вызывающий отклонение от линейной зависимости. Для этого ограничивают диапазон рабочих частот вращения тахогенератора так, чтобы относительная максимальная частота вращения
|
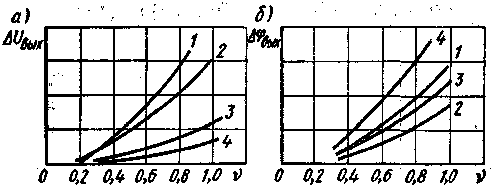
Рис. 5.22. Зависимости амплитудной (а) и фазовой (б) погрешности от v: 1- при отсутствии нагрузки; 2 - индуктивная нагрузка; 3 - активная нагрузка; 4 - емкостная нагрузка (сопротивление Zн нагрузки имеет одну и ту же величину) |
в тахогенераторах, используемых в измерительных устройствах и следящих системах, не превышала 0,5—0,7, а в тахогенераторах, используемых в счетнорешающих устройствах,— 0,2—0,3. При этом тахогенераторы должны иметь большую синхронную частоту вращения, в связи с чем их обычно выполняют на повышенную частоту питающей сети (400—500 Гц), с малым числом пар полюсов р.
В асинхронных тахогенераторах погрешность выходной характеристики является комплексной величиной, т. е. при изменении режима работы машины выходное напряжение изменяет-ся не только по величине, нo и по фазе. В связи с этим различают амплитудную ΔUвых и фазовую Δψвых погрешности тахогенератора (рис. 5.22).
Амплитудную и фазовую погрешности можно уменьшить путем соответствующей калибровки тахогенератора. Под калибровкой понимают установление такого наклона идеальной характеристики тахогенератора (см. рис. 5.19,б, кривая 2), при котором отклонение в среднем реальной характеристики 1 от идеальной было бы минимальным.