

Часть2, рефераты / Вопросы / vopros_23
.docx(вопрос 23)Скалярное управление асинхронным двигателем. Диапазон ослабления поля. Опрокидывающий момент.
При скалярном управлении по определенному закону изменяют амплитуду и частоту приложенного к двигателю напряжения. Изменение частоты питающего напряжения приводит к отклонению от расчетных значений максимального и пускового моментов двигателя, к.п.д., коэффициента мощности. Поэтому для поддержания требуемых рабочих характеристик двигателя необходимо с изменением частоты одновременно соответственно изменять и амплитуду напряжения.
В существующих преобразователях частоты при скалярном управлении чаще всего поддерживается постоянным отношение максимального момента двигателя к моменту сопротивления на валу. То есть при изменении частоты амплитуда напряжения изменяется таким образом, что отношение максимального момента двигателя к текущему моменту нагрузки остается неизменным. Это отношение называется перегрузочная способность двигателя.
При постоянстве перегрузочной способности номинальные коэффициент мощности и к.п.д. двигателя на всем диапазоне регулирования частоты вращения практически не изменяются.
Максимальный момент, развиваемый двигателем, определяется следующей зависимостью
Mмакс=k·U²/ƒ²
где k - постоянный коэффициент. Поэтому зависимость напряжения питания от частоты определяется характером нагрузки на валу электрического двигателя.
Для постоянного момента нагрузки поддерживается отношение U/ƒ = const, и, по сути, обеспечивается постоянство максимального момента двигателя. Характер зависимости напряжения питания от частоты для случая с постоянным моментом нагрузки изображен на рис.2. Угол наклона прямой на графике зависит от величин момента сопротивления и максимального крутящего момента двигателя.
Вместе с тем на малых частотах, начиная с некоторого значения частоты, максимальный момент двигателя начинает падать. Для компенсации этого и для увеличения пускового момента используется повышение уровня напряжения питания.
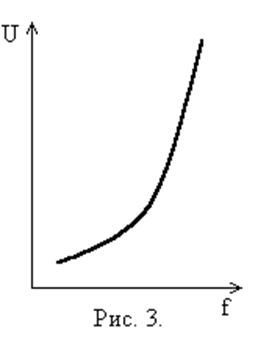
В случае вентиляторной нагрузки реализуется зависимость U/ƒ² = const. Характер зависимости напряжения питания от частоты для этого случая показан на рис.3. При регулировании в области малых частот максимальный момент также уменьшается, но для данного типа нагрузки это некритично.
Используя зависимость максимального крутящего момента от напряжения и частоты, можно построить график U от ƒ для любого типа нагрузки.
Скалярное управление достаточно для большинства практических случаев применения частотно регулируемого электропривода с диапазоном регулирования частоты вращения двигателя до 1:40.
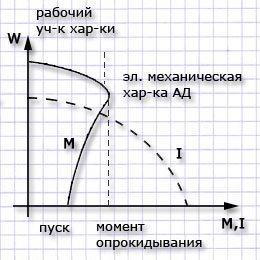
Максимальный момент двигателя называют опрокидывающим моментом. При работе двигателя с величинами момента нагрузки, меньше максимального момента, но близкими к нему, случайная перегрузка двигателя приводит к его остановке и к как правилу к выходу его из строя.
По
этой причине практически выбирают
двигатель такой мощности, при которой
выполняется неравенство:
![]() , при этом обеспечивается мощность
двигателя с запасом по мощности не менее
70%.
, при этом обеспечивается мощность
двигателя с запасом по мощности не менее
70%.
Важным достоинством скалярного метода является возможность одновременного управления группой электродвигателей. Метод скалярного управления относительно прост в реализации, но обладает двумя существенными недостатками. Во-первых, при отсутствии датчика скорости на валу двигателя невозможно регулировать скорость вращения вала, так как она зависит от нагрузки. Наличие датчика скорости решает эту проблему, однако остается второй существенный недостаток — нельзя регулировать момент на валу двигателя. С одной стороны, и эту проблему можно решить установкой датчика момента, однако такие датчики имеют очень высокую стоимость, зачастую превышающую стоимость всего электропривода. Но даже при наличии датчика управление моментом получается очень инерционным. Более того, при скалярном управлении нельзя регулировать одновременно и момент и скорость, поэтому приходится выбирать ту величину, которая является наиболее важной для данного технологического процесса.
Для устранения недостатков, присущих скалярному управлению был предложен метод векторного управления. Первые варианты электроприводов с векторным управлением требовали использования двигателей со встроенными датчиками потока. Это существенно ограничивало применение таких приводов.
Опрокидывающий момент. Электромагнитный момент создается не просто при взаимодействии поля статора и тока ротора. В процессе участвует не весь ток, а только его активная составляющая, то есть та, которая совпадает по фазе с ЭДС ротора. Реактивная же составляющая не создает никакого момента, попусту нагружая роторную цепь.
Интересно то, что взаимное соотношение величин этих составляющих непостоянно по мере пуска двигателя. Величина реактивной составляющей зависит от реактивного (индуктивного) сопротивления ротора. Чем больше индуктивное сопротивление, тем более реактивным является ток, тем больше сдвиг фаз между ним и ЭДС.
Соотношение, позволяющее определить индуктивное сопротивление, известно давно:
X=2πfL;
Параметр L (индуктивность цепи) здесь является неизменным. Иное дело – частота f. В роторной цепи она достигает максимальной величины в первый момент пуска, когда ротор неподвижен. Это 50 герц, частота сети.
При этом, поскольку частота максимальна, то и реактивная составляющая тока достигает своего максимума. При этом момент, конечно, не особенно велик по причинам, о которых мы говорили выше. Таким образом, получается, что при больших пусковых токах любой АД обеспечивает посредственный пусковой момент.
По мере разгона ротора частота тока в нем снижается из-за того, что снижается относительная скорость вращения электромагнитного поля. Снижается и реактивная составляющая тока ротора, а это приводит к тому, что при относительно малом токе двигатель может развить больший момент.
По достижении током частоты в несколько герц двигатель выходит на рабочую характеристику и достигает подсинхронной скорости вращения. Но при увеличении нагрузки до момента опрокидывания скорость снова снизится до такой степени, что реактивная составляющая тока ротора начнет преобладать.
Это приведет к тому, что при растущем токе момент двигателя уже не сможет повышаться и двигатель встанет в режиме короткого замыкания.