

Часть2, рефераты / Вопросы / vopros_11
.docx(вопрос 11)Исполнительные двигатели постоянного тока. Полюсное управление.
Исполнительные двигатели предназначены для преобразования управляющего электрического сигнала в угловое механическое перемещение вала в системах автоматики. Такие двигатели работают в условиях частых пусков и остановов, т. к. сигнал управления систематически меняется в соответствии с законом регулирования. Исполнительные двигатели иногда называют управляемыми.
В качестве исполнительных ДПТ применяют двигатели с электромагнитным независимым возбуждением или с возбуждением постоянными магнитами. Наличие щеточно-коллекторного узла усложняет эксплуатацию исполнительных двигателей и делает невозможным их применение во взрывоопасных и пожароопасных средах. Механическое трение щеток о коллектор усложняет управление такими двигателями.
В исполнительных ДПТ с электромагнитным возбуждением применяют якорное и полюсное управление. В двигателях с возбуждением постоянными магнитами — только якорное управление.
При полюсном управлении на обмотку якоря постоянно подается номинальное напряжение Uя.ном от независимого источника питания U (рис. 1). Управление угловой скоростью якоря осуществляется за счет изменения напряжения управления Uy на обмотке главных полюсов. Существенный недостаток полюсного управления — возможность самохода исполнительного двигателя. Это объясняется тем, что после прекращения сигнала управления двигатель остается возбужденным за счет небольшого магнитного потока остаточного магнетизма Фост и на якорь продолжает действовать небольшой электромагнитный момент Мост = k Фост iв, который при небольшой нагрузке на валу двигателя может вызвать самопроизвольное вращение якоря при α =0. Для устранения самохода двигатель должен иметь на валу постоянно действующую механическую нагрузку Мн >Мост
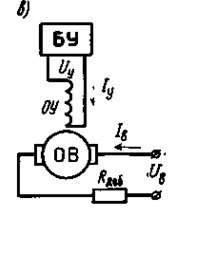
Рис 1
Магнитный поток машины Ф при отсутствии насыщения изменяется пропорционально напряжению управления. Для произвольного коэффициента сигнала поток Ф=αФном (где Фном – значение потока при α=1). Уравнение механической характеристики при полюсном способе управления:
ω =Uя.ном/αКФном - Rя/(αКФном)2Mэм = ω0.ид/α - Rя/(αКФном)2Mэм. (1)
Разделим правую и левую части уравнения (1) на ω0.ид и преобразуем полученное выражение :
ν =(α-m )/α2. (2)
m =α(1-να) (3)
При α=const выражение (2) является уравнением механической характеристики, а при М=const – уравнением регулировочной характеристики исполнительного двигателя с полюсным управлением. Механические и регулировочные характеристики, соответствующие полюсному управлению и рассчитанные по (2,3), представлены на рисунке 2,а,б
Рис. 2
Из анализа уравнения (3) следует, что механические характеристики (рис. 2,а) при полюсном управлении линейны. Устойчивость работы двигателя обеспечена при любом напряжении управления во всем диапазоне угловых скоростей. С уменьшением коэффициента сигнала уменьшается и жесткость механических характеристик. Значение пускового момента mп равно, как и при якорном управлении, коэффициенту сигнала α, т.е. прямо пропорционально напряжению управления. Регулировочные характеристики (рис. 2, б) при полюсном управлении нелинейны. В режиме идеального холостого хода (m=0) угловая скорость изменяется обратно пропорционально сигналу управления и при угловая скорость стремится к бесконечности. В реальном двигателе эта скорость ограничена, так как к валу всегда приложен момент трения. Если напряжение управления равно нулю, то вращающий момент создается за счет взаимодействия потока остаточного магнетизма полюсов и тока в якоре. Следовательно, в прецизионных двигателях с малым моментом трения при полюсном управлении теоретически возможен самоход. Если момент сопротивления на валу окажется больше, чем вращающий момент от потока остаточного магнетизма, то ротор остановится.
При малой нагрузке (m<0.5) c увеличением сигнала управления угловая скорость вначале растет, а затем, достигнув максимума, начинает уменьшаться, т.е. одна угловая скорость соответствует двум значениям коэффициента сигнала. Неоднозначность исчезает, и закон изменения скорости становится монотонно возрастающим только при значениях момента m ≥0.5.
Такая неоднозначная зависимость скорости от сигнала управления объясняется тем, что при увеличении потока возбуждения главных полюсов Ф в уменьшается ток якоря I я. Следовательно, электромагнитный момент может как увеличиваться, так и уменьшаться в зависимости от соотношения приращений Ф в и I я. На практике правые (по отношению к максимуму скорости) части регулировочных характеристик используются для расширения диапазона регулирования скорости при малом моменте нагрузки вверх от номинальной. Регулирование вверх от номинальной скорости ограничено механической прочностью и условиями коммутации двигателя; диапазон регулирования обычно не превышает D=2:1. Регулирование скорости вниз ограничено насыщением магнитопровода. При этом регулирование скорости от нуля до номинальной может осуществляться якорным способом (так называемое двухзонное регулирование). Левые части регулировочных характеристик могут использоваться для управления двигателем при значительных моментах нагрузки (обычно m ≥ 0,5). Проведенный анализ характеристик позволяет сравнить непрерывные способы управления. Преимущества якорного способа: 1) линейность и однозначность регулировочных характеристик при любом значении момента;
2) постоянная жесткость механических характеристик при различных значениях сигнала управления; 3) ток через щеточный контакт проходит только при вращении ротора, что предотвращает пригорание коллектора от местного нагрева при отсутствии вращения; 4) индуктивность обмотки якоря значительно меньше индуктивности обмотки главных полюсов (меньше число витков),что обеспечивает более высокую скорость электромагнитных переходных процессов. Преимуществом полюсного способа управления является только значительно меньшая мощность управления, - в главных полюсах выделяется обычно не более 5-20% от полной мощности, потребляемой двигателем. Благодаря значительным преимуществам якорный способ управления используют в большинстве схем. Как отмечалось, уравнения механических и регулировочных характеристик исполнительных двигателей постоянного тока были получены без учета реакции якоря. У реальной машины под воздействием реакции якоря механические и регулировочные характеристики могут быть нелинейными.