Часть2, рефераты / Вопросы / vopros_9
.docx(вопрос 9) Передаточные функции и структурные схемы исполнительного двигателя постоянного тока при якорном управлении.
У исполнительных двигателей с якорным управлением обмоткой возбуж-
дения является обмотка полюсов, а обмоткой управления – обмотка якоря
(рис. 1, ). Обмотку возбуждения подключают к сети с постоянным напряже-
нием Uв =Uв.н (номинальное напряжение на обмотке возбуждения) на все время работы автоматического устройства. На обмотку управления подают сигнал (напряжение управления) лишь тогда, когда необходимо вызвать вращение якоря двигателя. От напряжения управления зависят вращающий момент и частота вращения двигателя. При отсутствии напряжения управления якорь двигателя неподвижен. При изменении полярности напряжения управления меняется направление вращения якоря.
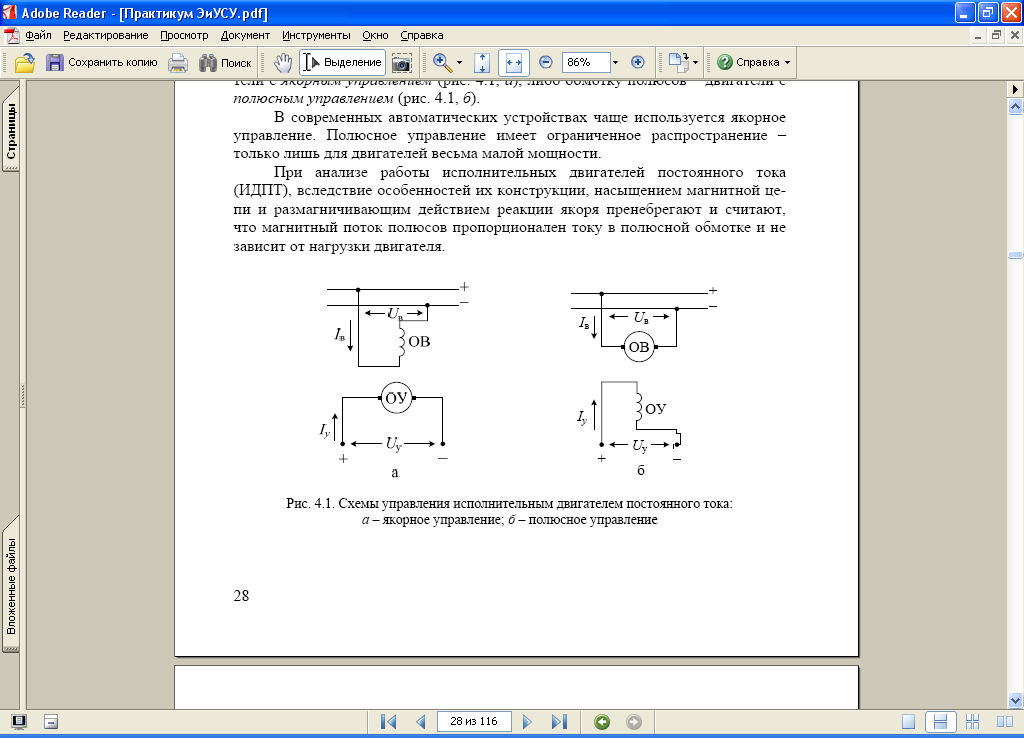
Рис. 1
Двигатель постоянного тока как динамическая система описывается следующими уравнениями в операторной форме:
На основании этих уравнений может быть построена структурная схема двигателя как динамической системы (рис 2).
Рис. 2. Структурная схема ДПТ.
Из структурной схему получим передаточные функции двигателя:
где  -
коэффициент передачи,
-
коэффициент передачи,  -
постоянная времени якоря,
-
постоянная времени якоря,  -
электромеханическая постоянная времени.
-
электромеханическая постоянная времени.
Пользуясь формулой Хевисайда, по передаточным функциям можно построить переходные процессы, например при пуске двигателя, как это показано на рис 3.
Рис. 3. Переходный процесс при пуске ДПТ.
При TM»TЯ, как это обычно бывает, получим выражения для тока и скорости при пуске: