

Часть2, рефераты / Сельсины. Индикаторный режим работы
.docx34. Сельсины. Индикаторный режим работы.
В различных отраслях промышленности и схемах автоматического управления и регулирования, а также в следящих системах широкое применение получили индукционные системы синхронной связи, под которыми понимают совокупность устройств, служащих для измерения или передачи на расстояние угловых перемещений двух или нескольких валов, механически не связанных между собой.
Основными показателями, характеризующими свойства индукционных систем синхронной связи, являются: питание от сети переменного тока постоянной частоты и самосинхронизация в пределах одного оборота вала.
К достоинствам таких систем можно отнести: 1) отсутствие искровой коммутации при работе системы; 2) высокую точность (ошибка не более 2,5° для машин низшего класса); 3) плавность отработки приемником поворота датчика; 4) использование датчиков и приемников бесконтактного типа; 5) однотипность датчиков и приемников.
Применяемые в индукционных системах в качестве датчиков и приемников микромашины получили название сельсинов.
Обмотки датчика и приемника, соединенные между собой линией связи, называют обмотками синхронизации, а обмотки, присоединяемые к питающей сети и предназначенные для создания магнитного потока машины, — обмотками возбуждения.
Сельсины подразделяют на трех- и однофазные. Трехфазные сельсины применяют при относительно болылих мощностях. Конструктивно их выполняют как обычные трехфазные асинхронные двигатели с фазным ротором.
У однофазных сельсинов обмотки возбуждения, как правило, однофазные, а обмотки синхронизации выполнены по типу трехфазных обмоток, фазы которых сдвинуты пространственно на 120° и соединены в звезду.
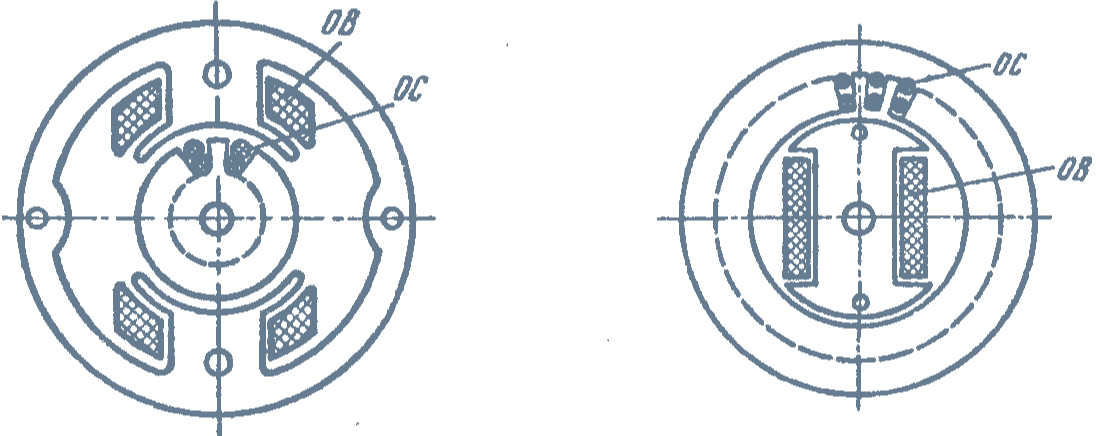
Рис 1. Схема конструкции сельсина с обмоткой возбуждения на явнополюсном статоре |
Рис. 2. Схема конструкции сельсина с обмоткой возбуждения на явнополюсном роторе |
Следует иметь в виду, что токи, протекающие по фазовым обмоткам, имеют одну и ту же временную фазу. Ток по обмоткам ротора протекает только в момент отработки. Основным видом однофазного сельсина следует считать машину, имеющую сосредоточенную обмотку возбуждения на статоре и распределенную обмотку синхронизации на роторе. Однофазные сельсины делятся на контактные и бесконтактные.
Из контактных сельсинов наибольшее распространение получили сельсины с явнополюсной магнитной системой. Обмотку возбуждения ОВ выполняют сосредоточенной; ее располагают как на полюсах статора (рис. 1), так и на полюсах ротора (рис.2). В соответствии с этим различное расположение имеет и распределенная обмотка синхронизации ОС.
Для самосинхронизации в пределах одного оборота сельсины проектируют двухполюсными. Полюсы имеют полюсные наконечники с углом охвата ротора около 120°. Чтобы приблизить форму кривой распределения поля к синусоидальной, воздушный зазор делают неравномерным, увеличивая к краям полюсного наконечника.
С точки зрения характеристик системы безразлично, где расположена обмотка возбуждения: на статоре или на роторе. Однако в сельсинах с обмоткой возбуждения на статоре в цепи обмотки синхронизации находятся три скользящих контакта, снижающих точность и надежность работы системы. Достоинство такой конструкции заключается в том, что ток через скользящие контакты в индикаторном режиме работы протекает только при наличии угла рассогласования.
|
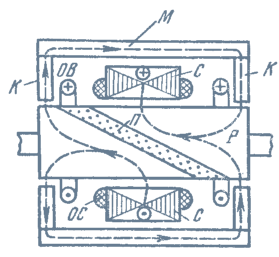
Рис. 3. Схема устройства бесконтактного сельсина |
контактов уменьшается до двух. Однако при этом через щетки и кольца непрерывно проходит ток возбуждения, что при длительном нахождении системы в состоянии покоя может вызвать подгорание щеточных контактов. Но ввиду малого тока возбуждения это явление наблюдается редко.
Существенный недостаток контактных сельсинов — наличие скользящих контактов, снижающих их надежность. При слабом нажатии на щетки переходные сопротивления контактов получаются большими и неодинаковыми, контакт не надежен, что приводит к увеличению погрешности передачи. Если повышать нажатие на щетки, контакт улучшается, но растет момент трения, что увеличивает погрешность передачи угла, приводит к быстрому износу контактов. Чтобы уменьшить переходное сопротивление и увеличить надежность работы сельсинов, кольца и щетки выполняют из сплавов серебра. Однако и это не может полностью избавить контактный сельсин от присущих ему недостатков.
Поэтому в настоящее бесконтактного сельсина время широко распространены бесконтактные сельсины. Отсутствие у них скользящих контактов позволяет получить лучшую устойчивость характеристик и длительно сохранить высокую точность.
Ротор Р представляет собой два пакета, набранные из листовой стали, разделенные косой прокладкой П из немагнитного материала. Обмотки на роторе нет. Статор состоит из основного пакета С и двух боковых колец К. В пазах основного пакета уложена распределенная обмотка синхронизации ОС, выполненная по типу трехфазной. К кольцам К примыкают пакеты внешнего магнитопровода М. Между кольцами и основным статорным пакетом расположены обмотки возбуждения ОВ в виде кольцевых катушек, охватывающих ротор. Как и в случае контактных сельсинов, ОВ (соединенные последовательно) присоединяют к однофазной сети, а ОС — к линии связи. Теоретический анализ работы бесконтактного сельсина в системе синхронной связи ничем не отличается от анализа работы контактного сельсина.
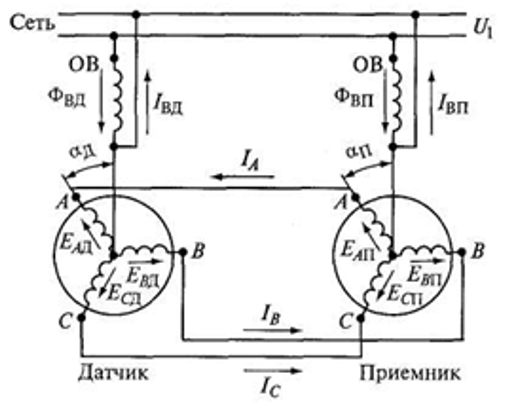
Работа сельсинов в индикаторном режиме Целью индикаторной связи является передача угла на расстояние при незначительном моменте сопротивления приемника. В этом случае сельсин-приемник (СП) самостоятельно отрабатывает угол, задаваемый сельсином-датчиком (СД), не требуя дополнительных усилительных и исполнительных устройств. Простейшая индикаторная система синхронной связи для дистанционной передачи угла состоит из двух одинаковых сельсинов (приемника и датчика) и линии связи (рис. 4). Обмотки возбуждения (ОВ) обоих сельсинов подключаются к однофазной сети переменного тока. Концы фаз А, В, С обмотки синхронизации приемника соединяются линией связи с концами фаз обмотки синхронизации датчика.
 Переменные
токи Iвд и Iвп обмоток
возбуждения сельсинов создают магнитные
потоки Фвд и
Фвп,
которые индуцируют в обмотках синхронизации
сельсинов электродвижущие силы: ЕАД,
ЕВД,
ЕСД,
ЕАП,
ЕВП и ЕСП. Значение
ЭДС обмотки той или иной фазы зависит
от ее пространственного расположения
относительно обмотки возбуждения. Если
фазы обмоток синхронизации датчика и
приемника расположены одинаково
относительно соответствующих обмоток
возбуждения (αд =
αп),
то в соединенных между собой линией
связи обмотках синхронизации приемника
и датчика индуцируются одинаковые и
встречно направленные ЭДС. Эти ЭДС
уравновешивают друг друга, и в цепи
обмоток синхронизации ток отсутствует.
Такое положение роторов сельсинов
называется согласованным.
Переменные
токи Iвд и Iвп обмоток
возбуждения сельсинов создают магнитные
потоки Фвд и
Фвп,
которые индуцируют в обмотках синхронизации
сельсинов электродвижущие силы: ЕАД,
ЕВД,
ЕСД,
ЕАП,
ЕВП и ЕСП. Значение
ЭДС обмотки той или иной фазы зависит
от ее пространственного расположения
относительно обмотки возбуждения. Если
фазы обмоток синхронизации датчика и
приемника расположены одинаково
относительно соответствующих обмоток
возбуждения (αд =
αп),
то в соединенных между собой линией
связи обмотках синхронизации приемника
и датчика индуцируются одинаковые и
встречно направленные ЭДС. Эти ЭДС
уравновешивают друг друга, и в цепи
обмоток синхронизации ток отсутствует.
Такое положение роторов сельсинов
называется согласованным.
Если ротор датчика поворотом на некоторый угол вывести из согласованного положения, то равновесие ЭДС, индуцированных в одноименных обмотках синхронизации, нарушится. За счет этого в обмотках синхронизации и линии связи появятся токи IА, IВ и IС. В результате взаимодействия этих токов с магнитными потоками обмоток возбуждения возникнут вращающие моменты как в сельсине-датчике, так и в сельсине-приемнике, которые будут стремиться привести роторы сельсинов в согласованное положение. Вращающие моменты, действующие на роторы приемника и датчика, будут равны по значению и противоположны по направлению.
Т.к. ротор сельсина-датчика после поворота обычно фиксируется (затормаживается), то поворачиваться (до согласованного положения) будет ротор сельсина-приемника. Значение синхронизирующего момента, развиваемого сельсином-приемником, зависит от угла рассогласования и параметров сельсинов системы.
Точность работы сельсинов в индикаторном режиме. Основным требованием, которое предъявляется к сельсинам, работающим в схемах синхронной связи, является точность отработки сельсином-приемником заданного сельсином-датчиком угла. Точность работы сельсинов в схеме синхронной связи зависит как от качества работы (точности) сельсинов-приемников, так и от качества работы (точности) сельсинов-датчиков.
Точность
работы сельсина-приемника в индикаторном
режиме характеризуется погрешностью
Δθ, которая определяется как полусумма
максимального положительного θmax1 и
максимального отрицательного
θmax2 отклонений
ротора приемника от согласованного с
ротором датчика положения за один
оборот:
![]()
Погрешность в статическом режиме определяется путем поворота ротора датчика сначала по часовой стрелке на 360°. Измерение погрешности производится либо непрерывно (с помощью приборов), либо через 1 или 10° в зависимости от требуемой точности.
По значению погрешности Δθ в статическом режиме при работе по схеме «один на один» различают индикаторные сельсины-приемники четырех классов точности: 1-й класс - Δθ не более ±30'; 2-й класс - Δθ не более ±45'; 3-й класс - Δθ не более ±60'; 4-й класс - Δθ не более ±90'.
Точность работы сельсинов-приемников в индикаторном режиме определяет ряд факторов: - удельный синхронизирующий момент МУД - момент, приходящийся на 1º угла рассогласования; - момент сопротивления на валу приемника Мс (обычно момент трения самого приемника Мс = МT); - добротность сельсина - отношение удельного синхронизирующего момента к моменту трения (Д =МУД/МT); - магнитная и электрическая несимметрия; - дисбаланс ротора; - время успокоения - время, в течение которого успокаивается (останавливается) ротор приемника после рассогласования на ±179°; - точность сельсинов-датчиков, режим работы и др.
Погрешности при работе сельсинов в индикаторном и трансформаторном режимах вызываются электрической, магнитной и механической асимметрией датчика и приемника, обусловленной технологическими причинами, влиянием высших гармонических в кривой МДС ротора, влиянием сопротивления линии связи, изменением напряжения питающей сети и др.
Технологические причины погрешностей можно устранить при изготовлении сельсинов, обеспечив высокую точность штамповки листов ротора и статора, а также сборки их пакетов; строгую концентричность цилиндрических поверхностей ротора и статора (равномерность воздушного зазора), тщательную балансировку ротора и пр.
Удельный синхронизирующий момент – это момент при угле рассогласования в один градус. Он является важнейшим фактором,определяющим точность работы, ибо именно он, а не максимальный синхронизирующий момент, определяет чувствительность системы передачи угла. Действительно, чем выше Муд, тем выше крутизна начальной части характеристики Mс=f(q), тем меньше ошибка рассогласования, Большую крутизну начальной части характеристики Mс = f(q) имеют, как правило, явнополюсные сельсины, поэтому для работы в индикаторных схемах целесообразнее применять сельсины указанной конструкции. В этом, в явнополюсности, состоит первое отличие индикаторных сельсинов от трансформаторных.
Мсн.уд = Mmax sin 1° = 0,0175Mmax .
Момент Мсн.уд пропорционален тангенсу угла наклона β характеристики Мсн = f(θ) в ее начальной части (см. рис. 5.41, а). Чем больше значения Мсн.уд , тем меньший угол рассогласования требуется для преодоления момента, возникающего от сил сопротивления, действующих на ротор, и, следовательно, тем меньше статическая погрешность сельсина. На рис. 5. а показаны кривые 1 и 2 изменения синхронизирующего момента для двух сельсинов-приемников, имеющих различные удельные синхронизирующие моменты. При одинаковом моменте сопротивления Мс погрешность θ1 сельсина с большим удельным синхронизирующим моментом Мсн.уд1 меньше погрешности θ2 сельсина с меньшим Мсн.уд2 .
|
|
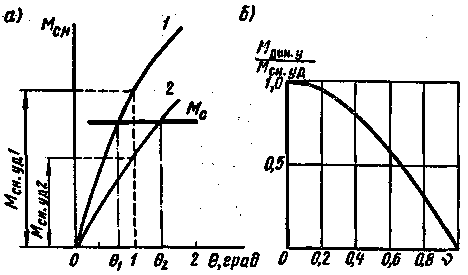
Рис. 5. Зависимости синхронизирующего момента от угла
рассогласования при различных значениях Мсн.уд и отношения Мдин.уд /Мсн.уд от относительной частоты вращения ротора
На рис. 5 б показана зависимость отношения Мдин.уд /Мсн.уд от относительной частоты вращения v. Обычно при v = 0,1 ÷ 0,2 динамический синхронизирующий момент Мдин ≈ Мсн . Поэтому если требуется осуществить синхронное вращение при больших абсолютных значениях частоты вращения, то обмотку возбуждения целесообразно питать от источника переменного тока повышенной частоты (чтобы относительная частота вращения v была небольшой).