

1 Билет. Осн. Понятия кинематики. Координатный и «естественный» способы описания движения.
Материальная точка — объект, размерами которого в условиях данной задачи можно пренебречь, считая его массу сосредоточенной в одной точке пространства. Вектор — это направленный отрезок.
Траектория —
линия в пространстве, вдоль которой
движется материальная точка.
Путь —
это длина траектории.
Перемещение —
это вектор, соединяющий начальное и
конечное положение материальной точки
в пространстве.
Равномерное
движение —
движение с постоянной скоростью.
Уравнение равномерного движения  или
или  .
Средняя
скорость по перемещению —
векторная величина, равная отношению
перемещения ко времени
.
Средняя
скорость по перемещению —
векторная величина, равная отношению
перемещения ко времени
 Средняя
скорость по пути —
скалярная величина, равная отношению
пути (длины траектории) ко времени .
Средняя
скорость по пути —
скалярная величина, равная отношению
пути (длины траектории) ко времени . Мгновенная
скорость —
производная перемещения по времени .
Мгновенная
скорость —
производная перемещения по времени . При
равномерном движении мгновенная скорость
равна средней.
Ускорение —
это производная скорости по времени:
При
равномерном движении мгновенная скорость
равна средней.
Ускорение —
это производная скорости по времени:  .
При
криволинейном движении ускорение
материальной точки раскладывается на
две
составляющих: нормальное ускорение
.
При
криволинейном движении ускорение
материальной точки раскладывается на
две
составляющих: нормальное ускорение  и тангенциальное ускорение
и тангенциальное ускорение  :
:
 Составляющая
ускорения, направленная к центру кривизны
траектории, т.е. перпендикулярно
(нормально) скорости, называется
нормальным ускорением
Составляющая
ускорения, направленная к центру кривизны
траектории, т.е. перпендикулярно
(нормально) скорости, называется
нормальным ускорением
 .
Она характеризует изменение скорости
по направлению:
.
Она характеризует изменение скорости
по направлению:
Составляющая
ускорения, направленная вдоль скорости,
называется тангенциальным ускорением
 .
Она характеризует изменение скорости
по модулю.
.
Она характеризует изменение скорости
по модулю.

При
равнопеременном прямолинейном
движении ускорение
материальнaой
точки равно изменению ее скорости за
единицу времени (одну секунду):

 Уравнение,
выражающее зависимость координаты тела
от времени его движения, называется уравнением
движения.
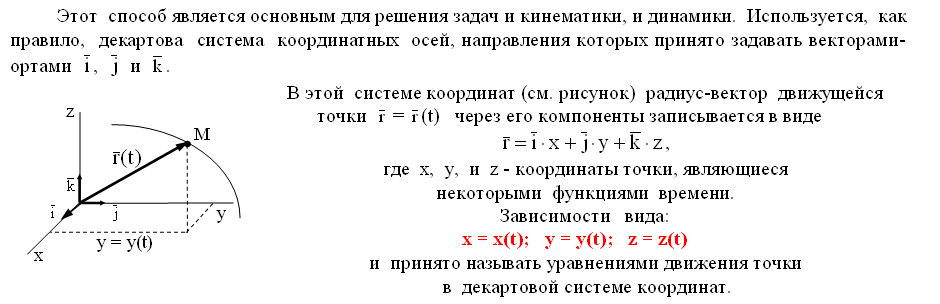
При координатном способе задания
движения:
Уравнение,
выражающее зависимость координаты тела
от времени его движения, называется уравнением
движения.
При координатном способе задания
движения:
То есть и вектор скорости точки, и вектор ее ускорения при координатном способе задания движения определяются через их проекции на координатные оси
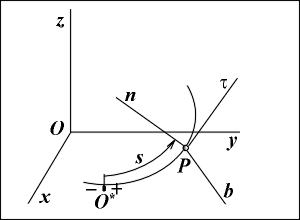
Естественный способ описания движения: когда заданы траектория точки и закон движения точки вдоль этой траектории в виде s = s(t).
В этом
случае векторы v и a определяют
по их проекциям не на оси системы
координат Oxyz, а на подвижные оси P![]() n
b, имеющие начало в точке Р и движущиеся
вместе с нею (см.рис.). Эти оси,
называемые осями
естественного трехгранника,
направлены следующим образом:
n
b, имеющие начало в точке Р и движущиеся
вместе с нею (см.рис.). Эти оси,
называемые осями
естественного трехгранника,
направлены следующим образом:
ось P направлена по касательной к траектории в сторону положительного направления отсчета координаты s;
ось Pn направлена по нормали к траектории, лежащей в соприкасающейся плоскости и направленной в сторону вогнутости траектории;
ось Pb направлена перпендикулярно к первым двум осям P и Pn так, чтобы она образовалаправую систему осей (с положительного направления оси Pb поворот оси P к оси Pn в их плоскости на прямой угол виден происходящим против хода часовой стрелки).
Нормаль Pn, лежащая в соприкасающейся плоскости (в плоскости самой кривой, если кривая плоская),называется главной нормалью, а перпендикулярная ей нормаль Pb - бинормалью.
2 Билет. Движение по окружности. Вектор угловой скорости.
Движение
тела по окружности является
частным случаем криволинейного движения.
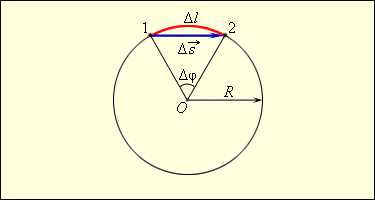
Наряду с вектором перемещения ∆ удобно
рассматривать угловое
перемещение Δφ(или угол
поворота),
измеряемое в радианах (рис. 1.6.1).
Длина дуги связана с углом поворота
соотношением
удобно
рассматривать угловое
перемещение Δφ(или угол
поворота),
измеряемое в радианах (рис. 1.6.1).
Длина дуги связана с углом поворота
соотношением 
При малых углах поворота Δl ≈ Δs.
|
|
Угловой
скоростью ω тела
в данной точке круговой траектории
называют предел ( )
отношения малого углового перемещения Δφ к
малому промежутку времени Δt:
)
отношения малого углового перемещения Δφ к
малому промежутку времени Δt: 
|
Угловая скорость измеряется в рад/с.
Связь
между модулем линейной скорости υ и
угловой скоростью ω: 
При
равномерном движении тела по окружности
величины υ и ω остаются
неизменными. В этом случае при движении
изменяется только направление вектора 
Равномерное
движение тела по окружности является
движением с ускорением.
 Ускорение
Ускорение
|
направлено
по радиусу к центру окружности. Его
называют нормальным или центростремительным
ускорением.
Модуль центростремительного ускорения
связан с линейной υ и угловой ω скоростями
соотношениями:  При
малых углах Δφ направление
вектора
При
малых углах Δφ направление
вектора  приближается
к направлению на центр окружности.
Следовательно, переходя к пределу
при Δt → 0,
получим:
приближается
к направлению на центр окружности.
Следовательно, переходя к пределу
при Δt → 0,
получим: 
При изменении положения тела на окружности изменяется направление на центр окружности. При равномерном движении тела по окружности модуль ускорения остается неизменным, но направление вектора ускорения изменяется со временем. Вектор ускорения в любой точке окружности направлен к ее центру. Поэтому ускорение при равномерном движении тела по окружности называется центростремительным.
Вектор угловой скорости: угловую скорость как вектор, величина которого численно равна угловой скорости, и направленный вдоль оси вращения, причем, если смотреть с конца этого вектора, то вращение направлено против часовой стрелки
Тогда
положение произвольной точки A задается
радиус-вектором r,
соединяющим начало отсчета с выбранной
точкой. Модуль скорости этой точки можно
рассчитать по формуле
 где
где  −
расстояние до оси вращения, α −
угол между векторами ω и r.
Направлен вектор скорости V перпендикулярно
плоскости, проходящей через векторы ω и r.
Так давайте, определим новую математическую
операцию над векторами ω и r,
такую, чтобы ее результатом был
вектор V.
Естественно,
что такая операция была придумана до
нас и называется она векторным
произведением
−
расстояние до оси вращения, α −
угол между векторами ω и r.
Направлен вектор скорости V перпендикулярно
плоскости, проходящей через векторы ω и r.
Так давайте, определим новую математическую
операцию над векторами ω и r,
такую, чтобы ее результатом был
вектор V.
Естественно,
что такая операция была придумана до
нас и называется она векторным
произведением

Билет 3. Инерциальные системы отсчета. I закон Ньютона.
Первый закон Ньютона: всякая материальная точка (тело) сохраняет состояние покоя или равномерного прямолинейного движения до тех пор, пока воздействие со стороны других тел не заставит ее изменить это состояние.
Стремление тела сохранять состояние покоя или равномерного прямолинейного движения называется инертностью. Поэтому первый закон Ньютона называют также законом инерции.
Механическое движение относительно, и его характер зависит от системы отсчета. Первый закон Ньютона выполняется не во всякой системе отсчета, а те системы, по отношению к которым он выполняется, называются инерциальными системами отсчета. Инерциальной системой отсчета является такая система, которая либо покоится, либо движется равномерно и прямолинейно относительно какой-то другой инерциальной системы. Первый закон Ньютона утверждает существование инерциальных систем отсчета:
Существуют такие системы отсчета, в которых тело сохраняет свою скорость постоянной или находится в состоянии покоя, если на него не действуют другие тела или действие других тел компенсируются. Такие системы отсчета называются инерциальными.
Важно отметить, что в отличие от кинематики, где все системы отсчета равноправны, в динамике первый закон Ньютона разделил все системы отсчета на две группы:
-инерциальные, в которых выполняются законы Ньютона, и
-неинерциальные, в которых не выполняются законы Ньютона.
Опытным путем установлено, что инерциальной можно считать гелиоцентрическую (звездную) систему отсчета (начало координат находится в центре Солнца, а оси проведены в направлении определенных звезд). Система отсчета, связанная с Землей, строго говоря, неинерциальная, однако эффекты, обусловленные ее неинерциальностью (Земля вращается вокруг собственной оси и вокруг Солнца), при решении многих задач пренебрежимо малы, и в этих случаях ее можно считать инерциальной.
Билет 4. Принцип относительности Галилея. Преобразования Галилея. Сложение скоростей.
Согласно представлениям классической механики, механические явления происходят одинаково в двух системах отсчета, движущихся равномерно и прямолинейно относительно друг друга.
Рассмотрим две инерциальные системы отсчета k и k'. Система k' движется относительно k со скоростью v = const вдоль оси x. Точка М движется в двух системах отсчета (рис. 8.1).
 Рис.
8.1
Рис.
8.1
Найдем связь между координатами точки M в обеих системах отсчета. Отсчет начнем, когда начала координат систем совпадают, то есть t = t'. Тогда:
|
|
(8.1.1) |
|

Совокупность уравнений (8.1.1) называется преобразованиями Галилея.
В
уравнениях (8.1.1) время t = t',
т.е. в классической механике предполагалось,
что время течет одинаково в обеих
системах отсчета независимо от скорости.
(«Существует абсолютное время, которое
течет всегда одинаково и равномерно»,
– говорил Ньютон). В векторной форме
преобразования Галилея можно записать
так:
Продифференцируем
это выражение по времени, получим
Выражение
(8.1.3) определяет закон
сложения скоростей в
классической механике. Из него следует,
что скорость движения точки М (сигнала) ![]() в
системе k'
и
в
системе k'
и ![]() в
системе k
различна.
в
системе k
различна.
Законы природы, определяющие изменение состояния движения механических систем, не зависят от того, к какой из двух инерциальных систем отсчета они относятся. Это и есть принцип относительности Галилея.
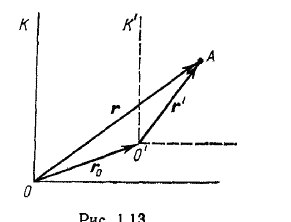
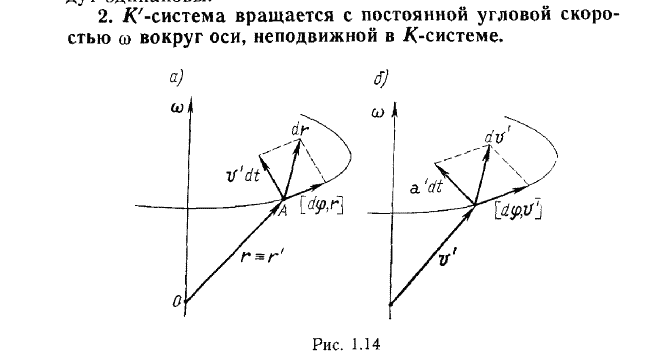
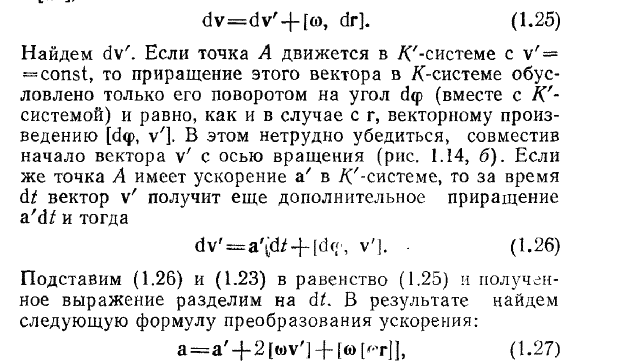
Билет 5. Неинерциальные системы отсчета. Преобразование скорости и ускорения.
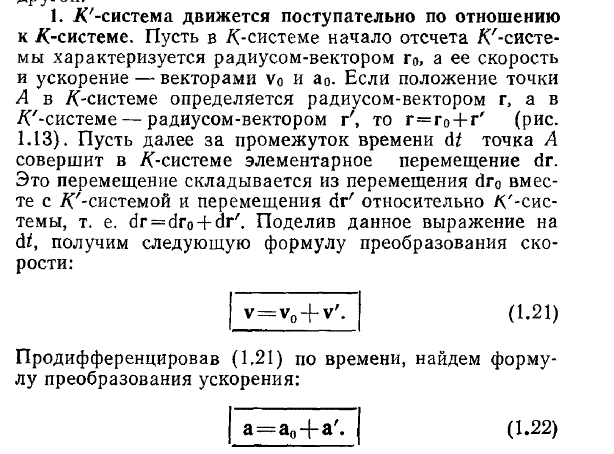 Неинерциальная
система отсчета —
это любая система, движущаяся по
отношению к инерциальной с ускорением.
Она может двигаться поступательно,
может вращаться, возможна и комбинации
этих движений. Наверное, самый простой
пример неинерциальной системы отсчета
— движущийся ускоренно лифт.
Преобразование
скоростей и ускорения:
Неинерциальная
система отсчета —
это любая система, движущаяся по
отношению к инерциальной с ускорением.
Она может двигаться поступательно,
может вращаться, возможна и комбинации
этих движений. Наверное, самый простой
пример неинерциальной системы отсчета
— движущийся ускоренно лифт.
Преобразование
скоростей и ускорения:
![]()

Билет 6. Сила, масса. Второй закон Ньютона. Сложение сил. Основное уравнение динамики. Импульс.
Масса – это свойство тела, характеризующее его инертность. В Международной системе единиц (СИ) масса тела измеряется в килограммах (кг).
Масса тела – скалярная величина.
Сила – это количественная мера взаимодействия тел. Сила является причиной изменения скорости тела. В механике Ньютона силы могут иметь различную физическую природу: сила трения, сила тяжести, упругая сила и т. д. Сила является векторной величиной. Векторная сумма всех сил, действующих на тело, называется равнодействующей силой.
Второй закон Ньютона – это фундаментальный закон природы; он является обобщением опытных фактов, которые можно разделить на две категории:
Если на тела разной массы подействовать одинаковой силой, то ускорения, приобретаемые телами, оказываются обратно пропорциональны массам:
 при
при  .
.Если силами разной величины подействовать на одно и то же тело, то ускорения тела оказываются прямо пропорциональными приложен силам:

Обобщая подобные наблюдения, Ньютон
сформулировал основной закон динамики:
Сила, действующая на тело, равна
произведению массы тела на сообщаемое
этой силой ускорение:
![]()
|
СЛОЖЕНИЕ СИЛ - нахождение геометрической суммы (т. н. главного вектора) данной системы сил путем последовательного применения правила параллелограмма сил или построения силового многоугольника. Для сил, приложенных в одной точке, при сложении сил определяется их равнодействующая.
Основное
уравнение динамики точки:

Масса точки
(тела) равна весу, деленному на ускорение
свободного падения:

Из равенства
для ускорения получим:
 -
Это равенство называется основным
уравнением динамики материальной точки.
-
Это равенство называется основным
уравнением динамики материальной точки.
Импульс (Количество
движения) — векторная физическая
величина, характеризующая меру
механического движения тела. В классической
механике импульс тела равен
произведению массы m этой
точки на её скорость v,
направление импульса совпадает с
направлением вектора скорости:
