

КР_990241_КИРИЛЕНКО
.pdfМинистерство образования Республики Беларусь
Учреждение образования БЕЛОРУССКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ
ИНФОРМАТИКИ И РАДИОЭЛЕКТРОНИКИ
Факультет компьютерного проектирования Кафедра электронной техники и технологии
Дисциплина «Программно-управляемое технологическое оборудование»
КОНТРОЛЬНАЯ РАБОТА
Студент: Кириленко Г. Б.
ст. гр. 990241
Руководитель: старший преподаватель кафедры Телеш Е. В.
2023
Содержание
1.Тепловые преобразователи для измерения давления…………………….3
2.Автоматические системы поддержания и регулирования температуры..7
3.Ловушки для диффузионных насосов……………………………………16
4.Список использованных источников…………………………………….18
2
Тепловые преобразователи для измерения давления
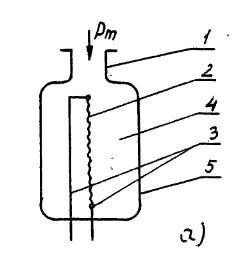
Принцип действия тепловых преобразователей основан на зависимости теплопередачи через разреженный газ от давления. Передача теплоты происходит от тонкой металлической нити к баллону, находящемуся при комнатной температуре (рис. 1). Металлическая нить нагревается в вакууме путем пропускания электрического тока.
Рис. 1. Схема теплового преобразователя для измерения давления.
1.Трубка для присоединения к вакуум системе.
2.Тонкая нагреваемая нить.
3.Держатель нити.
4.Газ.
5.Баллон датчика.
Уравнение теплового баланса такого манометра можно представить в виде
I2H*RH[1+α(TH-Tδ)] = QK + QT + QИ + QМ
где IH – сила электрического тока, проходящего через нагреваемую нить, А; RH - сопротивление нити при температуре Tδ, Ом;
TH - температура нити, град; Tδ - температура баллона, град;
α - температурный коэффициент сопротивления материала нити, 1/град; QK - тепло, отводимое газом за счет конвекции, Вт;
QТ - тепло, отводимое газом за счет теплопроводности, Вт; QИ - тепло, отводимое излучением, Вт;
QM - тепло, отводимое материалом нити за счет теплопроводности, Вт. Потери QИ и QМ не зависят от давления. Манометр должен быть
сконструирован так, чтобы в диапазоне работы изменение QK и QT в зависимости от давления составляло заметную долю от общих тепловых потерь нити, и, следовательно, его можно было измерить.
3
Большинство выпускаемых типов вакуумметров позволяет измерять вакуум в датчике на основе зависимости теплопроводности газа от давления:
QT = KS(TH - Tδ) P, (*)
где S - площадь поверхности нити, м2; P - давление в колбе датчика, Па;
K - коэффициент теплопроводности газа в высоком вакууме
В этом случае (без учета конвекции QK) уравнение теплового баланса
I2H*RH[1+α(TH-Tδ)] = 2πrlk (TH-Tδ) P + 2πrlσ (T4H-T4δ) + πr2b (TH-Tδ),
где I - длина нити; r - радиус нити;
σ - коэффициент Стефана – Больцмана;
b - коэффициент теплопроводности по сечению нити.
Изменение теплопроводности QT (и суммарного теплоотвода) от нагреваемой нити вызывает изменение ее температуры, по которому можно косвенно судить об изменении давления. Таким образом, тепловые преобразователи для измерения давления, являются манометрами косвенного типа.
Чувствительность теплового манометра зависит от рода газа, заполняющего баллон датчика. Обычно прибор градуируется по воздуху, а пересчет на давление другого газа РГ производят по формуле:
РГ = qГ *Р
Значения qГ для тепловых манометров:
Газ |
Воздух |
H2 |
He |
Ne |
CH4 |
Ar |
CO2 |
qГ |
1,0 |
0,67 |
1,12 |
1,31 |
0,61 |
1,65 |
0,94 |
Нижний предел измеряемых тепловым манометром давлений зависит от соотношения постоянных составляющих QИ, QМ уравнения, не зависящих от давления и тепла, отводимого за счет теплопроводности газа.
При QT QИ +QM температура нити практически становится постоянной и перестает зависеть от давления. Для понижения предельного измеряемого давления необходимо ослабить побочные процессы теплоотвода. Для уменьшения QМ нить должна иметь большое сопротивление тепловому потоку
QИ +QM температура нити практически становится постоянной и перестает зависеть от давления. Для понижения предельного измеряемого давления необходимо ослабить побочные процессы теплоотвода. Для уменьшения QМ нить должна иметь большое сопротивление тепловому потоку
– быть более тонкой. Для уменьшения QИ нужно снизить температуру нити ТH, т.к. по закону Стефана – Больцмана QИ ≈ T4H. Однако уменьшение Т снижает чувствительность.
Обычно (для датчиков ЛТ-2, ЛТ-4) ТН =300…400 ОС.
Верхний предел измеряемых давлений определяется двумя факторами: При переходе от среднего к низкому вакууму изменяется характер
теплопроводности газа QT, которая перестает зависеть от давления. Зависящим от давления фактором остается лишь конвективный теплоотвод:
QK = α(TH-Tδ)4/3 * P2/3, (1)
4
где α – коэффициент, определяемый свойствами и температурой газа, формой и поверхностью нагревателя, а также положением датчика.
При высоком давлении большая теплопроводность газа сильно снижает температуру нити ТН, уменьшая разность температур ТН - Тδ и приводит к потери чувствительности.
Как следует из молекулярно-кинетической теории, теплопроводность газа QT при низком вакууме не зависит от давления. Поэтому при соотношении:
L/d << 1 (точнее L/d < 1/200),
где L - длина свободного пробега молекул; d - размер колбы датчика (d = 2R).
Тепловой манометр принципиально не позволяет использовать зависимость
(*) для измерения давления.
При использовании конвективного теплоотвода по уравнению (1), при более высокой температуре нити накала, возможно измерение давления тепловыми манометрами в диапазоне 103…105 Па ( с большой погрешностью).
По способу измерения тепловые манометров делятся на два типа: манометры сопротивления и термопарные.
Вманометрах сопротивления (манометр Пирани) используется зависимость сопротивления нити от температуры. Нить манометра выполняет две функции: источник тепла и измерителя температуры.
Промышленность выпускает вакууметр сопротивления ВСБ-1 с датчиком МТ-6.
Втермопарных манометрах нить служит лишь источником тепла. Для измерения температуры применяется термопара.
Промышленность выпускает термопарные вакууметры ВТ-2 и ВТ-3, а также совмещенные в одном корпусе с ионизационными вакууметрами ВИТ-1 и ВИТ-2, работающие с датчиками ЛТ-2, ПМТ-1 (стеклянный) или ЛТ-4 (металлический). В датчике ЛТ-2 нить нагревателя изготовлена из технической платины, а в ЛТ-4 – из никеля или тантала.
Ввакууметрах ВТ-1, ВТ-2, ВТИ-1, ВИТ-2 датчики ЛТ-2, ЛТ-4, ПМТ-2 работают в режиме переменной температуры при постоянном токе накала. В диапазоне давлений 1*101…1*10-2 Па. Ток нити накала подбирается так, чтобы при давлении 1*10-2 Па ЭДС термопары составляла 10 мВ.
Градуировочная кривая датчика ЛТ-2 по воздуху приведена на рис. 2.
С течением времени градуировоченые кривые манометра могут изменяться за счет старения нити и баллона, образования пленок на их поверхности (от паров масла). Поэтому для очистки рекомендуется периодически прокаливать нить.
5
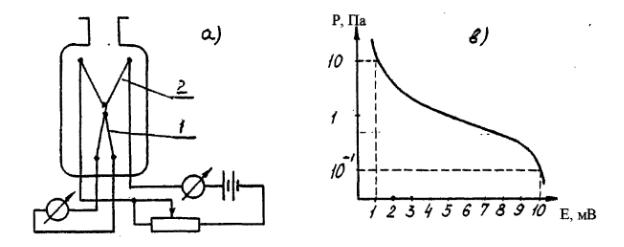
Рис. 2. Схема и градуировочная кривая датчика ЛТ-2. 1 – Термопара.
2 – Нагреваемая нить.
Показания теплового манометра обладают инерционностью, так как для изменения температуры нити требуется определенное время, обратно пропорциональное давлению. Это время изменяется от нескольких десятков секунд при 10-1 Па, до нескольких секунд при низком вакууме.
6
Автоматические системы поддержания и регулирования температуры
По принципу регулирования все системы поддержания и регулирования подразделяются на четыре класса.
1.Система автоматической стабилизации – система, в которой регулятор поддерживает постоянным заданное значение регулируемого параметра.
2.Система программного регулирования – система, обеспечивающая изменение регулируемого параметра по заранее заданному закону (во времени).
3.Следящая система – система, обеспечивающая изменение регулируемого параметра в зависимости от какой-либо другой величины.
4.Система экстремального регулирования – система, в которой регулятор поддерживает оптимальное для изменяющихся условий значение регулируемой величины.
Для регулирования и поддержания температурного режима электронагревательных установок применяются в основном системы двух первых классов.
Системы автоматического регулирования и поддержания температуры по роду действия можно разделить на две группы: прерывистого и непрерывного регулирования.
Автоматические регуляторы систем автоматического регулирования (САР) по функциональным особенностям разделены на пять типов:
–позиционные (релейные);
–пропорциональные (статические);
–интегральные (астатические);
–изодромные (пропорционально-интегральные);
–изодромные с предварением и с первой производной.
Позиционные регуляторы относятся к прерывистым САР, а остальные типы
регуляторов - к САР непрерывного действия. Ниже рассмотрены основные особенности позиционных, пропорциональных, интегральных и изодромных регуляторов, имеющих наибольшее применение в системах автоматического поддержания и регулирования температуры.
Функциональная схема автоматического регулирования температуры (рис. 3) состоит из объекта регулирования 1, датчика температуры 2, программного устройства или задатчика уровня температуры 4, регулятора 5 и исполнительного устройства 8. Во многих случаях между датчиком и программным устройством ставится первичный усилитель 3, а между регулятором и исполнительным устройством – вторичный усилитель 6. Дополнительный датчик 7 применяется в изодромных системах регулирования.
7
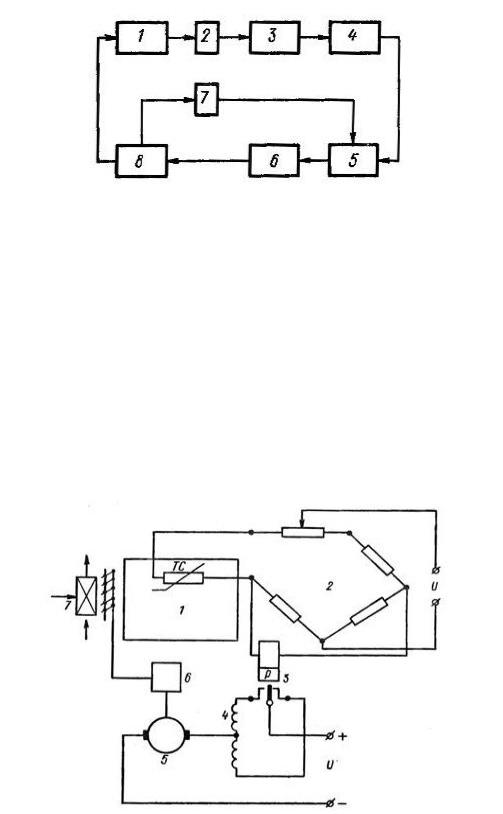
Рис. 3. Функциональная схема автоматического регулирования температуры.
В качестве датчиков температуры применяются термопары, термосопротивления (термисторы) и термометры сопротивления. Наиболее часто используются термопары.
Позиционные (релейные) регуляторы температуры.
Позиционными называют такие регуляторы, у которых регулирующий орган может занимать два или три определенных положения. В электронагревательных установках применяются двух- и трехпозиционные регуляторы. Они просты и надежны в эксплуатации.
На рис. 4 показана принципиальная схема двухпозиционного регулирования температуры воздуха.
Рис. 4. Принципиальная схема двухпозиционного регулирования температуры воздуха: 1 - объект регулирования, 2 - измерительный мост, 3 - поляризованное реле, 4 - обмотки возбуждения электродвигателя, 5 - якорь электродвигателя, 6 - редуктор, 7 – калорифер.
8
Для контроля температуры в объекте регулирования служит термосопротивление ТС, включенное в одно из плеч измерительного моста (2). Величины сопротивлений моста подбираются таким образом, чтобы при заданной температуре мост был уравновешен, то есть напряжение в диагонали моста равнялось нулю. При повышении температуры поляризованное реле (3), включенное в диагональ измерительного моста, включает одну из обмоток (4) электродвигателя постоянного тока, который с помощью редуктора (6) закрывает воздушный клапан перед калорифером (7.) При понижении температуры воздушный клапан полностью открывается.
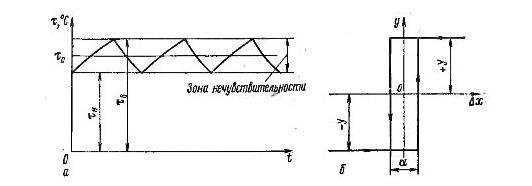
При двухпозиционном регулировании температуры количество подаваемого тепла может устанавливаться только на двух уровнях - максимальном и минимальном. Максимальное количество тепла должно быть больше необходимого для поддержания заданной регулируемой температуры, а минимальное - меньше. В этом случае температура воздуха колеблется около заданного значения, то есть устанавливается так называемый автоколебательный режим (рис. 5, а).
Линии, соответствующие температурам Тн и Тв, определяют нижнюю и верхнюю границы зоны нечувствительности. Когда температура регулируемого объекта, уменьшаясь, достигает значения Тн, количество подаваемого тепла мгновенно увеличивается и температура объекта начинает возрастать. Достигнув значения Тв, регулятор уменьшает подачу тепла, и температура понижается.
Рис. 5. Временная характеристика двухпозиционного регулирования (а) и статическая характеристика двухпозиционного регулятора (б).
Скорость повышения и понижения температуры зависит от свойств объекта регулирования и от его временной характеристики (кривой разгона). Колебания температуры не выходят за границы зоны нечувствительности, если изменения подачи тепла сразу вызывают изменения температуры, то есть если отсутствует запаздывание регулируемого объекта.
С уменьшением зоны нечувствительности амплитуда колебаний температуры уменьшается вплоть до нуля при Тн = Тв. Однако для этого требуется, чтобы подача тепла изменялась с бесконечно большой частотой,
9
что практически осуществить чрезвычайно трудно. Во всех реальных объектах регулирования имеется запаздывание. Процесс регулирования в них протекает примерно так.
При понижении температуры объекта регулирования до значения Тн мгновенно изменяется подача тепла, однако из-за запаздывания температура некоторое время продолжает снижаться. Затем она повышается до значения Тв, при котором мгновенно уменьшается подача тепла. Температура продолжает еще некоторое время повышаться, затем из-за уменьшенной подачи тепла температура понижается, и процесс повторяется вновь.
На рис. 5, б приведена статическая характеристика двухпозиционного регулятора. Из нее следует, что регулирующее воздействие на объект может принимать только два значения: максимальное и минимальное. В рассмотренном примере максимум соответствует положению, при котором воздушный клапан (см. рис. 4) полностью открыт, минимум - при закрытом клапане.
Знак регулирующего воздействия определяется знаком отклонения регулируемой величины (температуры) от ее заданного значения. Величина регулирующего воздействия постоянна. Все двухпозиционные регуляторы обладают гистерезисной зоной α, которая возникает из-за разности токов срабатывания и отпускания электромагнитного реле.
Пропорциональные (статические) регуляторы температуры.
Втех случаях, когда необходима высокая точность регулирования или когда недопустим автоколебательный процесс, применяют регуляторы с непрерывным процессом регулирования. К ним относятся пропорциональные регуляторы (П-регуляторы), пригодные для регулирования самых разнообразных технологических процессов.
Всистемах автоматического регулирования с П-регуляторами положение регулирующего органа (Y) прямо пропорционально значению регулируемого параметра (X):
Y = k1 Х,
где k1 - коэффициент пропорциональности (коэффициент усиления регулятора).
Эта пропорциональность имеет место, пока регулирующий орган не достигнет своих крайних положений (конечных выключателей).
Скорость перемещения регулирующего органа прямо пропорциональна скорости изменения регулируемого параметра.
На рис. 6 показана принципиальная схема системы автоматического регулирования температуры воздуха в помещении при помощи пропорционального регулятора. Температура в помещении измеряется термометром сопротивления, включенным в схему измерительного моста (1).
10