

TSAiU_Lektsia_13
.pdfЛекция №13. Технические средства автоматизации на основе интерфейса КАМАК
13.1 Магистраль крейта КАМАК
Рис. 13.1. Магистраль крейта КАМАК
Шина данных 24 разрядная, однонаправленная, состоит из 24 линий R (―Чтение‖) и 24 линий W (―Запись‖). По линиям W контроллер может пересылать информацию в функциональный модуль, по линиям R функциональный модуль может пересылать информацию контроллеру. Обмен данными может выполняться словами длиной до 24 двоичных символов, младший бит передается по линии R1. Шина адреса состоит из 24 индивидуальных линий ―номер станции‖ (N1-N24) – по линиям N передается адрес модуля, такой способ адресации называется географической адресацией. Также имеет 4 сквозных линии: A8, A4, A2, A1 – по ним передается субадрес элемента в модуле. Адрес некоторого элемента функционального модуля складывается из номера установочной станции Ni и кода субадреса. Дешифрация субадресов выполняется непосредственно в адресованном модуле. Шина управления состоит из 5 сквозных линий ―Операция‖ (F16, F8, F4, F2, F1) и 3 линий ―Общее управление‖ (Z, C, I). Сигналы на линиях F позволяю контроллеру передавать 32 различных кода операций от F(0) (F16=F8=F4=F2=F1=0) до F(31) (F16=F8=F4=F2=F1=1), которые должны выполняться адресованным модулем. Коды операций полностью декодируются в модуле.
Сигналы общего управления позволяют выполнять безадресные операции общего управления одновременно во всех модулях крейта. Сигнал Z (―Пуск‖ ) служит для начального запуска системы, позволяет установить все регистры данных, управляющие регистры и отдельные триггеры в определенное начальное состояние. Сигнал C (―Сброс‖) служит для установки в исходное состояние выбранных разработчиком регистров и отдельных триггеров. Разница в действии сигналов Z и C заключается в том, что сигнал Z должен обязательно использоваться разработчиком, а сигнал C может использоваться по усмотрению разработчика. Сигнал I (―Запрет‖) может запрещать действия в модуле, предусмотренные разработчиком.
1

Шина состояния включает 3 сквозные линии ―Состояние‖ (X, Q, B) и 24 индивидуальные линии ―Запрос на обслуживание‖ (L1-L24). Сигнал X (команда принята) является обязательным ответом модуля на адресованную ему операцию F(0)-F(31). Модуль вырабатывает сигнал X=1, если может выполнить команду. Во всех остальных случаях должен быть установлен X=0. Сигнал Q (Ответ) показывает состояние модуля, может вырабатываться модулем в ответ на любую адресованную операцию для указания состояния выбранного элемента модуля. Сигнал Q обязательно вырабатывается на команды: F(8) – проверка запросов и F(27) – проверка состояния. Сигнал B (магистраль занята) – единственный статусный сигнал, вырабатываемый контроллером крейта. Сигналы запросов L1-L24 вырабатываются модулями для передачи контроллеру сообщений о необходимости выполнения действий по их обслуживанию.
Шина синхронизации включает 2 сквозные линии: СТРОБ1, СТРОБ2 – синхронизация обмена по магистрали и синхронизация операций в модуле при контроллере. СТРОБ1 (S1) разрешает контроллеру или модулю принимать данные с линии магистрали и посылать какие-либо действия, не изменяющие состояние линий магистрали. СТРОБ2 (S2) используется для начала действий, которые могут изменить состояние линий магистрали. Во время действия операции F(2) выполняется чтение регистра и сброс регистра по S1 и его сброс по строб сигналу S2.
Шина питания включает возможность подключения обязательных источников питания, дополнительных источников питания и резервных линий.
13.2 Пространственно-временные диаграммы операций на магистрали крейта
B, N, A, F |
|
|
|
|
B |
|
|
W, R, Q, X |
|
|
|
|
Z, I или C |
|
|
L |
|
|
|
|
|
|
|
|
|
|
|
|
S2 |
|
|
S1 |
|
|
|
|
0,45 |
0,2 |
0,1 |
|
|
|
|
|
|
0,75 |
|
0,4 |
0,2 |
0,1 |
0 |
,2 |
0,1 |
|
|
|
1.0 |
а) |
|
|
|
б) |
|
Рис. 13.2 Временные диаграммы операций на магистрали крейта КАМАК: а) адресных, б) безадресных
a)Адресные операции.
Начиная операцию, контроллер выставляет на шины магистрали сигналы номера станции, субадреса, кода операции и сопровождает их сигналом ―магистраль занята‖ B=1. Адресованный модуль реагирует на команду, генерируя статусные сигналы X, Q, а также данные при операции чтения на линии R магистрали. При операции записи контроллер устанавливает информацию на шину W. Прием сигналов с линий X, Q, R, W должен происходить в интервале действия строб-сигнала S1. По строб-сигналу S2 информация на шине данных может быть изменена. Сигнал запроса на обслуживание от модуля L=1 должен блокироваться на время выполнения адресуемой операции, по ее окончании может быть установлен, если передаваемая команда не изменила его значение. Следующая операция может начинаться в момент окончания предыдущей операции. Установление сигналов новых опреаций совпадает по времени с удалением сигналов от предыдущей операции. Длительность адресуемой операции – 1 мкс.
2
Максимальная скорость передачи информации – 24 Мбит/с.
b)Безадресные операции Z, C, I вызывают действия во всех функциональных модулях, подключенных к магистрали. Операции Z и C обязательно сопровождаются сигналом B=1. Сигнал Z должен иметь абсолютный приоритет перед другими сигналами и сопровождаться сигналом I=1. Выполнение действий, определенных операциями Z и C, должно начинаться в момент появления строб-сигнала S2. Сигнал I=1 может устанавливаться на линию и сбрасываться в любые моменты времени. Помимо контроллера сигнал I может вводиться от внешнего источника или генерироваться функциональными модулями. В последнем случае сигнал I=1 сохраняется на магистрали до момента сброса его внутри модуля. Длительность безадресной операции составляет 0,75 мкс.
13.3 Виды и назначение адресных операций на магистрали крейта
Во время выполнения адресных операций в модуле могут выполняться следующие действия:
Чтение данных или запись;
Установка в 1 или сброс в 0;
Запуск модуля или его останов;
Проверка состояния модуля.
Код операции задается состоянием сигналов на пяти линиях F16, F8, F4, F2, F1 – 32 операции:
18 стандартных (содержание определено стандартом КАМАК);
8 нестандартных (могут использоваться разработчиком по своему усмотрению);
6 резервных (зарезервированы для дальнейшего развития системы КАМАК).
Адресные операции интерфейса КАМАК
Функция |
Содержание операции КАМАК |
Использование шин R, W |
|
|
|
F(0) |
Чтение регистра группы 1 |
Используется шина R |
F(1) |
Чтение регистра группы 2 |
|
F(2) |
Чтение и сброс регистра группы 1 |
|
F(3) |
Чтение обратного кода регистра группы 1 |
|
F(4), F(6) |
Нестандартная |
|
F(5), F(7) |
Резервная |
|
|
|
|
F(8) |
Проверка запросов |
Не используются шины R и W |
F(9) |
Сброс регистра группы 1 |
|
F(10) |
Сброс запросов |
|
F(11) |
Сброс регистра группы 2 |
|
F(12), F(14) |
Нестандартная |
|
F(13), F(15) |
Резервная |
|
|
|
|
F(16) |
Запись в регистр группы 1 |
Используется шина W |
F(17) |
Запись в регистр группы 2 |
|
F(18) |
Селективная установка регистра группы 1 |
|
F(19) |
Селективная установка регистра группы 2 |
|
F(20), F(22) |
Нестандартная |
|
F(21) |
Селективный сброс регистра группы 1 |
|
F(23) |
Селективный сброс регистра группы 2 |
|
|
|
|
3
F(24) |
Запрещение |
Не используются шины R и W |
F(25) |
Исполнение |
|
F(26) |
Разрешение |
|
F(27) |
Проверка состояния |
|
F(28), F(30) |
Нестандартная |
|
F(29), F(31) |
Резервная |
|
|
|
|
Адресные операции F(0)-F(3), F(9), F(11), F(16)-F(19), F(21), F(23) позволяют разделить регистр модулей на 2 группы. В каждом модуле могут присутствовать 2 группы регистров (выбираемые кодом операции) по 16 регистров в каждой (выбираемых субадресом)
Все операции по назначению делятся на четыре группы, которые характеризуются определенными значениями сигналов линий F8 и F16:
F(0)-F(7) – операции чтения, данные передаются из функционального модуля в КК по шине R. F(8)-F(18) – первая группа операций управления.
F(24)-F(31) – вторая группа операций управления.
F(16)-F(23) – операции записи, данные передаются из КК в функциональный модуль по шине W.
В каждой группе содержатся 8 операций, которые варьируют основной содержание операций в данной группе.
1.Операции чтения.
F(0), F(1) – передают содержимое регистров группы 1,2 из функционального модуля (ФМ) в КК. Данные КК всегда принимает в момент строб-сигнала S1.
F(2) – За один командный цикл выполняются два действия: чтение данных из ФМ в КК в момент строб-сигнала S1, сброс данных в регистре модуля в момент строб-сигнала S2.
F(3) – передает из ФМ в КК обратный код регистров группы 1.
F(0), F(1), F(3) – при выполнении данные в регистрах модулей не изменяются.
2.Операции управления 1, 2 группы: F(8)-F(15), F(24)-F(31). При выполнении операций данные не должны передаваться.
F(8) – используется для контроля L-запроса от модуля. Операция LAM-требования (Look At Me). При выполнении команды F(8) передается ответ по линии Q. Q=1 – есть запрос от модуля, и он разрешен в модуле; Q=0 – запрос отсутствует или запрещен в модуле (замаскирован).
F(9), F(11) – сброс регистров 1 или 2 группы.
F(10) – сброс источника L-запроса в модуле. Источник запроса – LAM-источник, сигнал
–LAM-статусный сигнал.
F(24) – запрещение каких-либо действий в модуле или маскирования сигнала.
F(26) – операция разрешения: разрешает те действия, которые запрещены F(24).
F(25) – операция используется для исполнения или прекращения любых действий в модуле, если не целесообразно использовать операции F(24) или F(26).
F(27) – операция служит для проверки состояния любых функциональных узлов модуля, при этом ответ поступает на линию Q: Q=1 – присутствует LAM-статусный сигнал, Q=0
–отсутствует.
Операции F(8)-F(15), F(24)-F(31) могут стробироваться строб-сигналами S1 или S2, так как не меняют данных на магистрали.
4

3.Операции записи F(16)-F(23).
Данные из КК передаются в ФМ по шине W, линии W1-W24.
F(16), F(17) – используются для записи данных с шины W в регистр 1 или 2 группы. ФМ при выполнении этих операций принимает данные в момент строб-сигнала S1.
F(18), F(19) – селективная установка разрядов регистров 1 или 2 группы.
F(21), F(23) – селективный сброс разрядов регистров 1 или 2 группы.
Эти операции действуют только на те разряды регистров, которым соответствует 1 в передаваемом слове данных. Выбранные разряды либо устанавливаются в 1 (F(18), F(19)), либо сбрасываются в 0 (F(21), F(23)).
Пример: |
|
|
|
F(18), F(19). |
|
F(21), F(23). |
|
10101010 |
← регистр |
10101010 |
← регистр |
11001100 |
← W |
11001100 |
← W |
11101110 |
← результат |
00100010 |
← результат |
При выполнении любой адресной генерации ФМ может генерировать статусные сигналы. Сигнал X – команда принята, сигнал Q – ответ модуля – статусный сигнал. КК принимает сигналы X, Q и данные с шины R в момент строб-сигнала S1.
13.4Функциональные модули интерфейса КАМАК
Кнастоящему времени разработано около 2000 наименований модулей, из них в Советском Союзе и России примерно 500, в МЭИ около 30.
В каждом ФМ можно выделить следующие элементы:
1.Интерфейсная часть модуля, служит для дистанционного управления модулем.
2.Функциональная часть модуля, определяет назначение модуля и его технические характеристики.
3.Органы ручного управления для связи с объектом.
Магистраль крейта КАМАК
Синхр
N A F Z S1 B |
X |
Q |
L |
R |
W |
||
|
|
C S2 |
|
|
|
|
|
4 |
5 |
I |
|
Статус |
|
24 |
24 |
|
|
|
|
|
|
ШД |
|
ША |
|
ШУ |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
Интерфейсная часть модуля |
|
|
|||
Дешифратор |
Схема формирования |
|
Регистры данных |
||||
внутренних команд |
статусных сигналов |
|
|
||||
|
|
Функциональная часть модуля |
|
||||
|
|
Органы управления и связи с объектом |
|
||||
|
|
Ввод |
|
|
|
Вывод |
|
Внешние соединения
Рис.13.3 Основные компоненты функционального модуля КАМАК
5

Интерфейсная часть модуля включает в себя следующие элементы:
Дешифратор внутренних команд дешифрирует адресные сигналы N, A8, A4, A2, A1 и формирует однопроводные сообщения вида:
A(0) A8 A4 A2 A1 1,
. . .
A(15) A8 A4 A2 A1 1,
Дешифратор адресных операций F16, F8, F4, F2, F1 формирует однопроводные сообщения
вида:
F(0) F16 F8 F 4 F2 F1 1,
. . .
F(31) F16 F8 F4 F 2 F1 1,
Сигналы с выходов дешифраторов объединяются в помощью логической схемы ―И‖ и на выходе получают 512 различных операций. Некоторые операции должны стробироваться сигналами S1 или S2.
Рис. 13.4 Дешифратор внутренних команд функционального моду
Схемы формирования статусных сигналов
Сигнал Х – команда принята, модуль вырабатывает на любую адресную операцию. Если модуль может выполнить команду, то Х=1.
NA(m)F (k)
m,k |
|
К линии X |
|
ИЛИ |
|||
|
Магистрали крейта |
||
|
|
||
|
|
Рис. 13.5. Схема формирования статусного сигнала "X" от функционального модуля КАМАК
6
Статусные сигналы Q и L используются при реализации различных способов обмена данными по магистрали крейта с контроллером: по готовности или с прерыванием текущей программы процессора.
Если инициатором обмена является КК, то он проверяет Q и выполняет обмен если Q=1.
Если инициатор ФМ, то он устанавливает L-запрос на обслуживание, L=1. В ФМ может быть до 16 LAM-источников (столько же LAM- запросов), в КК присылается только один.
1.Схема формирования статусных сигналов Q, L в модуле с одним источником запросов
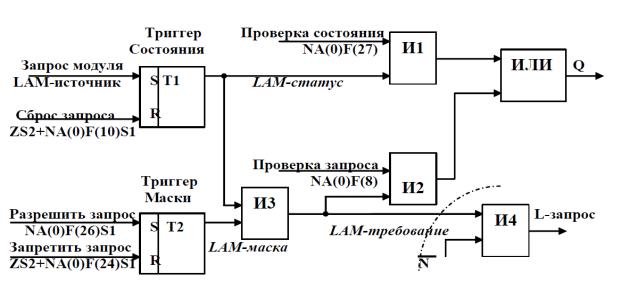
Источник запросов на обслуживание (LAM-источник) подсоединен к триггеру состояния Т1.
При появлении запроса от LAM-источника, T1 устанавливается в 1, на выходе триггера появляется LAM-статусный сигнал. Сброс в 0 триггера состояния производится командой Z в момент стробсигнала S2 или командой NA(0) F(10) S1 (если в модуле не предусмотрен аппаратный сброс). Проверка сигнала на выходе триггера состояния (LAM - статуса) осуществляется командой NA(0)F(27), при этом информация передается на линию Q магистрали крейта.
Триггер маски Т2 разрешает или запрещает прохождение LAM-статусного сигнала на шину L. Сигнал на выходе Т2 называется LAM-маска. Установка в единицу/сброс в ноль триггера маски в процессе работы системы выполняется командами: NA(0)F(26)S1- разрешить / NA(0)F(24)S1 – запретить.
Рис. 13.6 Схема формирования сигналов L, Q в модуле КАМАК с одним источником запросов на обслуживание
LAM-статусный сигнал, прошедший через элемент ―И3‖ называется LAM-требование. LAM-требование передается на линию L через схему И4, если нет обращения к модулю. Если нет обращения КК к ФМ, сигнал LAM - требования через схему И4 выходит на магистраль как сигнал L - запрос модуля.
В такой схеме (с одним источником запроса) L-запрос и LAM-требование совпадают. Проверка LAM-требования и L-запроса осуществляется чтением сигнала c линии Q по команде
NA(0)F(8).
При начальном запуске системы сигнал общего управления ZS2 сбрасывает LAM – статусные сигналы и запрещает формирование LAM- требований в модулях.
Следовательно, в начальный момент времени LAM - требования и L -запросы будут отсутствовать.
7

13.5 Управляющие модули КАМАК
Управляющие модули КАМАК предназначены для управления функциональными модулями и организации связи между ФМ и вычислительными средствами системы.
Различают следующие виды КК:
1.Автономные КК – самостоятельно решают задачу управления.
2.КК на основе внешней ЭВМ – получают команды управления комплексом от внешней ЭВМ.
3.КК для ветви КАМАК – управляют ФМ с помощью сигналов магистрали ветви.
Все КК включают на 2 части:
Управляющая часть КК (в функциональном отношении одинаковая для всех видов КК) предназначена для управления обменом информацией по магистрали крейта (Рис. 13.7.).
С ее помощью генерируются сигналы на магистраль крейта в соответствии с пространственновременными диаграммами операций интерфейса.
Интерфейсная часть КК является интерфейсом к источнику программ, т.е. либо к устройству автономного управления, либо ЭВМ, либо ветви КАМАК.
Именно в интерфейсной части КК определяется команды и когда будут подаваться на магистраль и какие способы обмена данными могут использоваться – программный обмен или обмен ПДП. Функциональная схема интерфейсной части КК определяется конфигурацией автоматизированной системы.
Управляющая часть КК включает:
1. Генератор цикла КАМАК задает временный цикл сигналов на магистрали крейта. Генератор вырабатывает на магистрали сигналы B, S1, S2 в соответствии с временными диаграммами адресных и безадресных операций.
Функциональная часть
|
Генератор цикла КАМАК |
|
B |
|
|
||
|
|
S1 |
|
|
|
|
|
|
|
|
S2 |
|
|
|
23/ N1-N23 |
|
Схема формирования адресных |
|
|
|
|
|
|
|
сигналов |
|
4/ A8, A4, A2, A1 |
|
|
|
|
|
|
|
3/ Z, C, T |
|
Схема формирования |
|
|
|
|
|
|
|
управляющих сигналов |
|
5/ F16, F8, F4, F2, F1 |
|
|
|
|
|
|
|
24/ W1-W24 |
|
Регистры данных |
|
|
|
|
|
24/ R1-R24 |
|
|
|
24/ L1-L24 |
|
Схема формирования и |
|
|
|
|
X |
|
|
обработки статусных сигналов |
|
|
|
|
Q |
|
|
|
|
|
|
|
|
|
 Магистраль КАМАК
Магистраль КАМАК
Рис. 13.7. Функциональная схема контроллера крейта КАМАК
8

2. Схемы формирования адресных сигналов N, A8, A4, A2, A1 определяют адрес компоненты ФМ на магистрали, с которым будем связан КК при выполнении адресной операции.
3.Схемы формирования управляющих сигналов, определяют тип операции на магистрали: адресную операцию определяют состояние линий F16, F8, F4, F2, F1,
безадресную операцию определяют состояние линий Z, C, I.
4.Регистры данных служат для буферного хранения данных поступающих либо с шины данных R магистрали крейта, либо из интерфейсной части КК для передачи в ФМ по шине данных W.
5.Схемы хранения и обработки статусных сигналов фиксируют:
–запросы на обслуживание – L- запросы, поступающие от модулей крейта в произвольные моменты времени,
–сигналы: Q - ответ и X - команда принята от модуля, выполнившего последним адресную команду, в момент строб-сигнала S1.
Сигналы L - запросов на обслуживание разделяются КК по приоритетам.
Статусные сигналы используются КК для контроля состояния модулей и принятия решения по управлению ими.
Автоматизированная система на основе внешней ЭВМ и методика управления модулями крейта
Архитектура автоматизированной системы на основе внешней ЭВМ (Рис. 13.8.) может включать от 1 до 4 крейтов КАМАК.
Крейт 1 |
ЭВМ |
КК |
Магистраль |
|
|
|
Ввода- |
Крейт 2 |
|
|
вывода |
|
КК |
ЭВМ |
|
|
Магистраль |
||
|
|
|
|
|
КАМАК |
|
|
Крейт 3 |
|
КК |
|
Крейт 4 |
|
КК |
|
|
|
|
Рис. 13.8. Архитектура АС на основе внешней ЭВМ
Общая длина магистрали, соединяющей ЭВМ и крейты КАМАК может достигать 10 метров. КК транслирует сигналы магистрали ЭВМ в сигналы магистрали крейта. Архитектура системы не определена стандартом, для каждого типа ЭВМ требуется специально разработанный КК. Недостаток системы – ограниченная длина линий связи. Для адресации какого-либо модуля в крейте необходимо указать номер крейта, субадрес и номер станции.
9