

LR3_YTS / Новиков_ЛР3
.pdfНа рисунке 10 изображен график, построенный в результате выполнения этого скрипта.
Рисунок 10 – Сигнал на обмотке ШД
Рисунок 11 – Сигнал на обмотке ШД (увеличенный фрагмент)
Далее графическим методом определяются следующие параметры: время ичисло импульсов прямого и обратного ходов. На рисунке 12 приведен скрипт программы для расчета параметров, а на рисунке 13 – получившиеся значения.
11
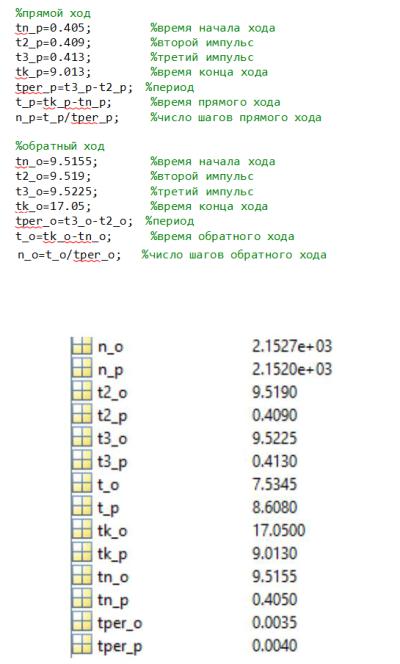
Рисунок 12 – Программа в MATLAB для получения данных с графика
Рисунок 13 – Результаты работы программы В таблице 1 приводится сравнение рассчитанных значений в
‹‹MathCAD›› и полученных по результатам эксперимента.
12

Таблица 1 – Сравнение заданных и экспериментально полученных параметров
Название параметра |
Задано |
Получено |
|
|
|
Число импульсов прямого хода |
2152 |
2152 |
|
|
|
Число импульсов на обратном ходу |
2152 |
2157 |
|
|
|
Время прямого хода |
8,5 |
8,61 |
|
|
|
Время простоя |
0,5 |
0,503 |
|
|
|
Время обратного хода |
7,5 |
7,53 |
|
|
|
Погрешности количества импульсов для прямого и обратного ходов:
∆П = 8,61 − 8,5 × 100% = 1,29 % 8,5
∆О = 7,53 − 7,5 × 100% = 0,4 % 7,5
Как видно из выражений, полученные значения несильно отличаются от заданных (погрешность менее 2%), следовательно, последовательность управляющих команд задана верно.
13
Заключение
В данной лабораторной работе были изучены устройство и принципы работы шагового двигателя, а также его применение в автомобилях. Был проведён расчет параметров в программе MathCAD. Была написана управляющая программа в среде IDE Arduino. Также был проведён эксперимент для проверки работоспособности написанной программы.
Результаты, полученные в ходе эксперимента, за исключением количества шагов, совпали с расчетами, с небольшой погрешностью.
14