

LR1_YTS / Новиков_ЛР1
.docx
|
Министерство науки и высшего образования Российской Федерации Федеральное государственное бюджетное образовательное учреждение высшего образования «Московский государственный технический университет имени Н.Э. Баумана (национальный исследовательский университет)» (МГТУ им. Н.Э. Баумана) |

Кафедра СМ-9 «Многоцелевые гусеничные машины и мобильные роботы»
Отчёт
по лабораторной работе №1
по курсу «Управление техническими системами»
по теме: «Основы анализа систем автоматического
управления (САУ) в пакете MATLAB»
Выполнил: _________________________________ (Новиков А.Д.)
Студент группы СМ9-71
Принял: ___________________________________ (Бузунов Н.В.)
Содержание
1 Теоретическая часть 3
2 Практическая часть 4
2.1 Нахождение нулей и полюсов 4
2.2 Построение графиков АФЧХ 5
2.3 Построение графиков ЛАЧХ 6
2.4 Построение графиков АЧХ И ФЧХ 7
2.5 Исследование САУ 7
2.6 Построение модели 10
Заключение 15
1 Теоретическая часть

Рисунок 1 – Расчетная схема системы подрессоривания
Дифференциальное уравнение движения для схемы (рисунок 1):
|
(1) |

где
 масса, принимается равной 500
масса, принимается равной 500
 ;
;
𝑦 − координата, м;
 коэффициент демпфирования, принимается
равным
коэффициент демпфирования, принимается
равным

 ;
;
 жесткость пружины, принимается равным
жесткость пружины, принимается равным
 ;
;
𝑢 − силовое воздействие, Н;
𝑓 − кинематическое воздействие, м.
Запишем данное уравнение с помощью
оператора дифференцирования
 :
:
|
(2) |

Передаточная
функция относительно силового воздействия
 :
:
|
(3) |

Передаточная
функция относительно кинематического
воздействия
 :
:
|
(4) |

2 Практическая часть
2.1 Нахождение нулей и полюсов
Введем исходные данные для решения нашей задачи в исполняемый файл программного комплекса Matlab (рисунок 2):

Рисунок 2 – Исходные данные для ПО Matlab
Для получения передаточных функций применяется операция tf(). Для нахождения нулей и полюсов используются функции zero() и pole() соответственно. В результате выполнения этого файла в рабочей области Matlab создаются переменные sys_u и sys_f, содержащие соответствующие передаточные функции рассматриваемой системы. В результате поиска нулей и полюсов исследуемых функций получаются следующие значения (рисунок 3, 4):

Рисунок 3
–
Нули
и полюса
передаточной функции


Рисунок 4
–
Нули
и
полюса
передаточной
функции

2.2 Построение графиков АФЧХ
Вызвав функцию nyquist (), построим амплитудно-фазовые частотные характеристики (АФЧХ) для обеих передаточных функций и (рис. 5, 6):

Рисунок 5 – АФЧХ для

Рисунок 6 – АФЧХ для
2.3 Построение графиков ЛАЧХ
Для построения логарифмических амплитудных частотных (ЛАЧХ) и фазовых частотных (ЛФЧХ) характеристик используется функция bode() для передаточной функции (рис. 7):

Рисунок 7 – ЛАЧХ и ЛФЧХ для
2.4 Построение графиков АЧХ И ФЧХ
Для построения амплитудных частотных (АЧХ) и фазовых частотных (ФЧХ) характеристик используется функция bode() для передаточной функции (рис. 8):

Рисунок 8 – АЧХ и ФЧХ для
2.5 Исследование САУ
Для исследования САУ во временной области используются функции step() и impulse(). Step() позволяет определить отклик системы на единичное ступенчатое воздействие (переходную функцию), а impulse() – определить отклик системы на единичное импульсное воздействие (весовую функцию).
Сначала используем функцию step() применительно к обеим передаточным функциям и (рисунки 9, 10) соответственно:

Рисунок 9 – Воздействие ступенчатой функции на систему с передаточной функцией

Рисунок 10 – Воздействие ступенчатой функции на систему с передаточной функцией
Затем используем функцию impulse() применительно к обеим передаточным функциям и (рисунки 11, 12) соответственно:

Рисунок 11 – Воздействие импульсной функции на систему с передаточной функцией

Рисунок 12 - Воздействие импульсной функции на систему с передаточной функцией
На данных
рисунках видно,
что система
совершает около
трех колебаний
до положения
равновесия. Такой
случай не
является
оптимальным
для колесных
машин. В
связи с
этим подбирается
оптимальный коэффициент
демпфирования
 .
Тогда графики
для обеих
передаточных функций
и
(рисунки 13, 14)
будут выглядеть
следующим
образом:
.
Тогда графики
для обеих
передаточных функций
и
(рисунки 13, 14)
будут выглядеть
следующим
образом:

Рисунок 13 – Реакция системы с передаточной функцией на единичное ступенчатое воздействие при

Рисунок 14 – Реакция системы с передаточной функцией на единичное ступенчатое воздействие при
2.6 Построение модели
Для исследования САУ используем ПО Matlab Simulink. Воспользуемся расчетной схемой, изображенная на рисунке 12. Рассмотрим поведение системы при различных воздействующих функциях: SinWave (рисунки 15, 16), Step (рисунки 17, 18), Impulse (рисунки 19, 20).
В зависимости от воздействующей функции подключаем разные модули попеременно на силовое и кинематическое воздействие, обнуляя другой. Получаем различные функции колебаний.

Рисунок 15 – Схема MATLAB Simulink


Рисунок
16 – Установившиеся колебания при
синусоидальном силовом воздействии с
частотой 10



Рисунок 17 – Установившиеся колебания при синусоидальном кинематическом воздействии частотой 10


Рисунок 18 – Реакция системы на единичное ступенчатое силовое воздействие


Рисунок 19 – Реакция системы на единичное ступенчатое кинематическое воздействие
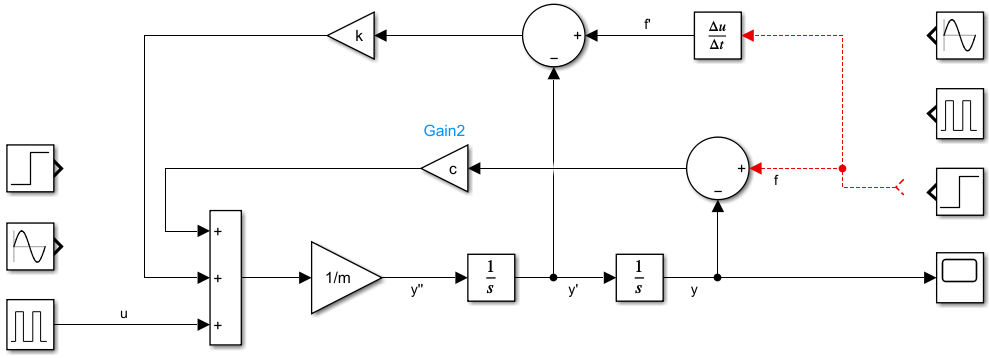

Рисунок 20 – Реакция системы на единичное импульсное силовое воздействие


Рис. 18 Реакция системы на единичное импульсное кинематическое воздействие
Заключение
В результате проведенной работы была рассмотрена одномассовая модель подвески четверти автомобиля. Получены передаточные функции, описывающие заданную модель. Исследованы АФЧХ, ЛАЧХ/ЛФЧХ, АЧХ/ФЧХ, соответствующих передаточных функций. Рассмотрены отклики системы на типовые входные воздействия, такие как ступенчатая и импульсная функции.
На основании представленных дифференциальных уравнений собрана имитационная модель в Matlab Simulink и исследованы ее реакции при различных входных сигналах. В результате исследования модели видно, что колебания системы отстают от возмущающей силы по фазе. Амплитуда колебаний системы больше амплитуды колебаний возмущающего кинематического возбуждения из-за близости частоты возмущения к собственной частоте системы, и возникновения явления частичного резонанса.
Москва 2023 г.