

713
.pdfполученный |
из |
эксперимента; |
разностьрасчетного |
и |
экспериментального сдвигов траекторий |
|
|
||
15 |
|
|
|
|
|
|
|
1Г |
|
10 |
|
|
|
|
|
|
5Г |
1 |
|
5 |
|
|
|
|
0 |
|
|
|
|
5 |
0 |
5 |
10 |
15 |
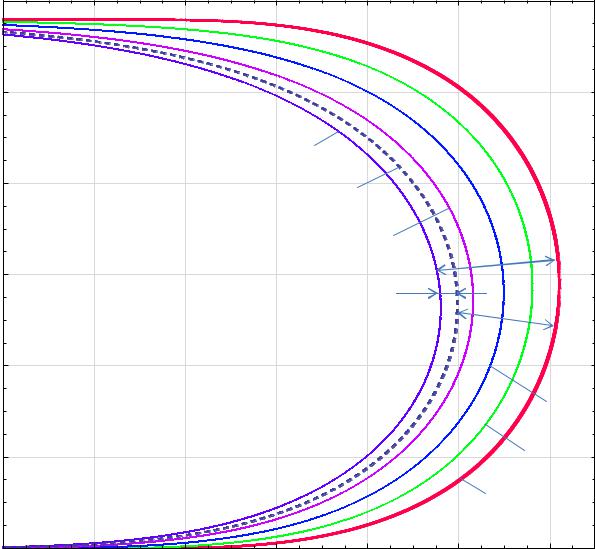
Рис. 2.22. Основная траектория автомобиля-тягача (1) и габаритная полоса движения автопоезда, совершавшего поворот влево на (1Г-
(1Г-
внешняя габаритная траектория – траектория правого переднего колеса автомобиля-тягача, 5Г- внутренняя габаритная траектория – траектория левого заднего колеса второго прицепа)
88
12 |
|
|
|
|
|
|
|
10 |
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
8 |
|
|
|
5 |
Э |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
Р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1,5 |
6 |
|
|
|
|
|
δ1,5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Э |
|
|
|
|
|
|
|
1,5 |
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
2 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
1 |
0 |
|
|
|
|
|
|
|
0 |
2 |
4 |
6 |
|
8 |
10 |
12 |
Рис. 2.23.Поворот влево на . 1 – траектория середины задней оси
. 1 – траектория середины задней оси
автомобиля, 2 – траектория середины передней оси первого прицепа, 3 – траектория середины задней оси первого прицепа, 4 – траектория середины передней оси второго прицепа, 5 – траектория середины задней оси второго прицепа при движении автопоезда, совершавшего поворот влево на ;5Э– траектория середины задней оси второго прицепа, полученная
;5Э– траектория середины задней оси второго прицепа, полученная
экспериментально; - расчетный сдвиг основной траекториипятого
- расчетный сдвиг основной траекториипятого
элементарного кинематического звена по отношению к основной траектории автомобиля-тягача; - сдвиг основной траекториизадней оси
- сдвиг основной траекториизадней оси
второго прицепа по отношению к основной траектории автомобиля-тягача,
89

полученный |
из |
эксперимента; |
– |
разностьрасчетного |
и |
экспериментального сдвигов траекторий |
|
|
|
||
Выводы
В данной главе разработано приложение модульно-структурного подхода применительно к аналитическому исследованию кинематики многозвенного автопоезда.
Получены аналитические расчѐтные формулы углов складывания при криволинейном движении автопоезда, на основе которых построена методика определения положения звеньев автопоезда относительно опорной плоскости. Выведенные зависимости позволили получить аналитические формулы, определяющие основные параметры маневренности и вписываемости в заданные габаритные коридоры многозвенного автопоезда–основные и габаритные траектории, уширения габаритной полосы движения.
Приведѐн алгоритм, основанный на предоставлении приведѐнного угла поворота управляемых колѐс тягача в виде кусочно-непрерывной функции, позволяющий моделировать различные манѐвры автопоезда.
Исследованы поворотына и
и трѐхзвенного автопоезда в
трѐхзвенного автопоезда в
составе автомобиля-тягача МАЗ-5549 и двух прицеповТ-325А. Исследованы стадии прямолинейного, переходного и кругового
движения N -звенного автопоезда с одинаковым одноосным прицепными звеньями. Выявлен конструктивный параметр  , характеризирующий степень колебательной неустойчивости движения многозвенного автопоезда. Показано,что значение такогопараметра является одним из определяющих при расчетах габаритных полос движения и вписываемости однородных многозвенных автопоездов в заданные коридоры движения. При этом для обеспечения движения прицепныхзвеньев ―колея в колею‖оно должно быть переменным(управляемым) в зависимости от стадии движения автопоезда.
, характеризирующий степень колебательной неустойчивости движения многозвенного автопоезда. Показано,что значение такогопараметра является одним из определяющих при расчетах габаритных полос движения и вписываемости однородных многозвенных автопоездов в заданные коридоры движения. При этом для обеспечения движения прицепныхзвеньев ―колея в колею‖оно должно быть переменным(управляемым) в зависимости от стадии движения автопоезда.
Проведена проверка достоверности разработанной методики путѐм сравнения траекторий и габаритных полос движения трехзвенного автопоезда, построенных расчетным путѐм и экспериментально. Сопоставление расчѐтных и экспериментальных данных показало их хорошее совпадение, что позволяет считать разработанный метод вполне работоспособным в исследованиях маневренных свойств многозвенных автопоездов.
90
ЗАКЛЮЧЕНИЕ
На основе системного подхода разработан модульный метод исследования автопоездов. При этом методологические аспекты научноисследовательских работ по автопоездам представлены в компактномвидеструктурной формулой И=(МИ,СО,МАП,СР).
Получена система структурных и вычислительных блоков и моду-
лей , из которых строятся математические модели движения автопоезда.
, из которых строятся математические модели движения автопоезда.
Эта система, записанная в виде совокупности уровневых модулей, принята в качестве формализации общей задачи исследования функционирования автопоезда и оценки эффективности его функционирования.
Проведен структурный анализ автопоездов.При этом структура
любого автопоезда, состоящего из |
N |
транспортных звеньев, |
представляется структурной формулой: |
|
|
.
Введено понятие представления информации о движении (функционировании) автопоезда как механической системы. Рассмотрены различные типы таких представлений.
Совокупность структурных модулей, совместно со структурными формулами представлена в качестве кодасодержания научноисследовательских работ, в компактной форме выражающего содержание научного исследования автопоезда. С помощью такой кодировки НИР проведен системный анализ содержания ряданаучно-исследовательских работ по автопоездам. Предложенаинтерпретация новизны, глубины и полноты содержания исследовательской работы.Выявлены тенденции углубления и расширения содержания научных исследованийврассматриваемой области.Отмеченные тенденции выражаются вусложнении модели конструкции автопоезда, более полном учете разнообразия дорожных и атмосферно-климатических условий, впринятии более сложных моделей управления и режимов движения, в увеличении количества исследований по проблемам устойчивости и управляемости автопоездов,в появлении
91
комплексных исследований эксплуатационных свойств автопоездов с применением вычислительной техники и др.
Разработанная системная методика применена при составлении обобщенной математической моделиисследования маневренных свойств многозвенного автопоезда.
При исследовании маневренных свойств обобщенного автопоезда получены формулы, позволяющие рассчитывать углы складывания звеньев автопоезда при его криволинейном движении. Получены аналитическиерешенияуравнений, описывающих углы складывания звеньев автопоезда в ряде практически важных частных случаях.
На основании полученных расчетных формул построена методика определения положения звеньев автопоезда относительно опорной плоскости. Выведены формулы, определяющие основные параметры маневренности и вписываемости в заданные габаритные коридоры многозвенного автопоезда - габаритные траектории, уширение габаритной
полосы движения. |
|
|
|
Выявлен |
параметр |
конструкции |
многозвенного |
автопоезда (отношение длины заднего свеса предшествующего звена к базе рассматриваемогоi-го звена), характеризующий вписываемость автопоезда и степень колебательной неустойчивости его движения.
(отношение длины заднего свеса предшествующего звена к базе рассматриваемогоi-го звена), характеризующий вписываемость автопоезда и степень колебательной неустойчивости его движения.
Показано, что определяющее влияние на характеристики вписываемости и маневренности многозвенного автопоезда оказывают режимы движения, число звеньев автопоезда, геометрические размеры
звеньев автопоезда, а также значения параметров .
.
В работе отмечено противоречие требований по обеспечению
наилучшей вписываемости при круговом движении автопоезда ( ) и достижению наибольшего запаса устойчивости при прямолинейном
) и достижению наибольшего запаса устойчивости при прямолинейном
движении автопоезда ( ). Показано, что решению этого противоречия, наряду с другими мероприятиями (управляемость осей прицепных звеньев,
). Показано, что решению этого противоречия, наряду с другими мероприятиями (управляемость осей прицепных звеньев,
"компромиссное" значение параметра и т . д . ) , может способствовать разработка конструкций автопоездов с изменяемой (управляемой) во время движения геометрией, в частности, с переменными длинами задних свесов звеньев.
и т . д . ) , может способствовать разработка конструкций автопоездов с изменяемой (управляемой) во время движения геометрией, в частности, с переменными длинами задних свесов звеньев.
Полученные аналитические расчетные формулы, определяющие основные параметры маневренности автопоезда при его криволинейном движении,применены при исследовании трехзвенного автопоезда в составе
92
автомобиля-тягача МАЗ-5549 и двух прицепов Т-325А, представленногопятизвенной кинематической системой шарнирно связанных тел, движущихся относительно опорной плоскости.
Сопоставление расчетных траекторий движения такого автопоезда
при совершении различных маневров (повороты на и
и ) с траекториями этого автопоезда, полученными в эксперименте, показало их хорошее совпадение.
) с траекториями этого автопоезда, полученными в эксперименте, показало их хорошее совпадение.
Проанализировано влияние конструктивных геометрических и кинематических параметров на маневренные свойства автопоездов.
Разработаны алгоритмы и программные средства, реализующие соответствующие методики на персональном компьютере.
В связи с изложенным, предлагается использовать методику системного описания автопоезда для сокращения сроков разработки математических моделей движения автопоезда и уменьшения трудоемкости их получения.
Полученные структурные формулыавтопоездов целесообразно применять для структурного синтеза автопоезда с заданными желательными эксплуатационными свойствами.
Посредством структурных формулрекомендуется проводить качественные исследования проблематики содержания НИР по автопоездам: систематизацию, классификацию НИР, - выявлять тенденции развития теории автопоезда.
Полученные при анализе маневренности многозвенного автопоезда аналитические зависимости рекомендуется использовать в качестве расчетных формул для определения углов складывания, траекторий движения звеньев автопоезда, габаритных полос движения автопоезда и при решении вопросов вписываемости звеньев автопоезда в заданные коридоры движения.
Для улучшения маневренности многозвенных автопоездов предлагается при конструировании наряду с другими мероприятиями обеспечивать возможность изменения в процессе движения длин задних свесов звеньев автопоезда.
93
СПИСОК ЛИТЕРАТУРЫ
1.Авилов В.Т. О кибернетическом подходе к оценке акустических условий в салоне автомобиля. - Автомобильная промышленность, 1978,
№1, с. 16-18.
2.Ажмегов В.Ф. и др. К вопросу оценки качества подвески автомобиля на основе системного подхода. - Автомобильная промышленность, 1977,
№8, с. 14-16.
3.Аксенов А.И., Андреев А.С. Экспериментальное исследование устойчивости прямолинейного движения трехзвенного автопоезда. - Автомобильная промышленность, 1971, № 5, с. 12-14.
4.Аксенов А.И., Никольский В.В. Исследование устойчивости прямолинейного движения многозвенного автопоезда. - Автомобильная промышленность, 1972, №2, с. 18-20.
5.Аксенов П.В. Соотношение поперечной статической и динамической устойчивости автомобиля против опрокидывания. - Автомобильная промышленность, 1972, № 4., с. 26-27.
6.Аксенов П.В. О системном подходе в прикладной науке по автомобилю. - Автомобильная промышленность, 1975, № 9, с. 28-30.
7.Аксенов Л.В., Ширяев П.П. Об управляемости активных полуприцепов. - Автомобильная промышленность, 1963, № 11, с, 16-18.
94
8.Андреев А.С., Павлов В.А. Кинематический анализ криволинейного движения многозвенного прицепного автопоезда. - Автомобильная промышленность, 1969, № 3, с. 8-10.
9.Антипов Г.П., Ильичев С.В. К вопросу об уравнениях криволинейного движения автопоезда. – М.: Труды МАДИ, 1979, вып. 166.
10.Антонов Д.А. Об оценке устойчивости кругового движения многоосных автомобилей. - Автомобильная промышленность, 1962, № 3, с. 18-22.
11.Антонов Д.А. Теория устойчивости движения многоосных автомобилей. - М.: Машиностроение, 1978. - 216 с.
12.Асриянц А.А., Хачатуров А.А., Шестаков И.Н., Яковлев Е.И. Дифференциальные уравнения движения прицепного автопоезда. - Труды МАДИ, 1979, вып. 130.
13.Асриянц А.А., Хачатуров А.А., Шестаков И.Н.,Яковлев Е.И. Исследование криволинейного движения автопоезда с помощью АВМ. - Научные труда МАДИ, 1974, вып. 91, с. 51-58.
14.Аюпов В.В. Системный подход к исследованию динамики автопоезда. - В кн.: Проблемы механики управляемого движения. - Межвузовский сборник научных трудов, Пермь, 1982, с. 9-16.
15.Аюпов В.В. К динамике управляемого движения автопоезда.- В кн.: Проблемы механики управляемого движения, Пермь, 1980,с.2225.
16.Аюпов В.В. Структурный анализ автопоездов. - Деп. в НИИН автопром, № 1016ап-84. - 13 с.
17.Аюпов В.В., Маланин В.В., Юрлов А.Г. К исследованию горизонтально-поперечных колебаний полуприцепа. - Изв. вузов, Машиностроение, 1976, № 8, с. I14-119.
18.Бабаков И.М. Теория колебаний. - М.: Наука, 1968. - 560с.
19.Бахмутский М.М., ГинцбургЛ.Л. Взаимосвязь реакций автопоезда на управление и управляемости системы "автопоезд - водитель" - Автомобильная промышленность, 1973, № 2, с. 32-33.
20.Бахмутский М.М., Шарапов В.К. Исследование курсовой устойчивости автопоезда с прицепом, имеющим поворотное устройство автомобильного типа. - Автомобильная промышленность, 1969, № 7, с.
17-19.
21.Беленький Ю.Ю., Азбель А.Б., Жуков А.В., Шишло В.П. Расчет ширины коридора вписывания автопоезда в поворот с применением ЭЦВМ. - Автомобильная промышленность, 1976, № 12, с. 24-25.
95
22.Беллман Р., Калаба Р. Квазилинеаризация и нелинейные краевые задачи. - М.: Мир, 1968. - 183 с.
23.Белов Р.В., Осепчугов В.В., Фаробин Я.Е. Проектирование специализированного подвижного состава. - М.: Труды МАДИ, 1979. – 111с.
24.Бергман М.М. Графическое исследование поворота автомобиля с прицепом и без прицепа. - Мотор, 1934, № 11, с. 15-23.
25.Блауберг И.В., Юдин Э.Г. Становление и сущность системного подхода. - М.: Наука, 1973. - 270 с.
26.Бидерман В.Л., Шумаев В.В. Нестационарное качение пневматической шины. - Изв. вузов, Машиностроение, 1977, № 12, с.8590.
27.Брянский Ю.А. Управляемость большегрузных автомобилей.- Машиностроение, М., 1983. - 176 с.
28.Взятышев Н.А. Применение метода фотометрирования при исследовании поперечных колебаний автотранспорта. - Автомобильная промышленность, 1963, № 8, с. 16-18.
29.Взятышев Н.А. О поперечной устойчивости седельного автопоезда на неустановившихся режимах движения. - Автомобильная промышленность, 1965, № 10, с. 20-23.
30.Взятышев Н.А. Поперечная устойчивость седельного автопоезда. - Автомобильная промышленность, 1964, № 12, с. 19-23.
31.Власко Ю.М., Хачатуров А.А. Исследование управляемости автопоезда. - М.: Транспорт, 1970. - 32 с.
32.Выгонный А.Н., Титович А.И., Ведерчик А.В. К вопросу управляемости автопоезда большой грузоподъемности при прямолинейном движении. - Автомобильная промышленность, 1977, № 10, с.21-23.
33.Гантмахер Ф.Р. Лекции по аналитической механике. - М.: Физматгиз,
I960. - 296 с.
34.Генбом Б.Б., Осепчугов В.В. и др. Об устойчивостидвижения прицепного автопоезда при торможении. - Автомобильная промышленность, 1977, № 3, с. 22-25.
35.Гинцбург Л.Л. Устойчивость управляемого движения автомобиля относительно траектории. - Автомобильная промышленность, 1977 № 9, с. 27-31.
36.Гладов Г.И., Кузнецов C.Ю. О маневренности трехзвенных автопоездов. - М.: Труды МАДИ, 1979, вып. 160.
96
37.Горобцов А. С. Математическое моделирование динамики АТС. Проблемы и перспективы / А. С. Горобцов // Автомобильная промышленность. — 2006. — № 4. — с. 14-16.
38.Горобцов А. С. Программный комплекс расчета динамики и кинематики машин как систем твердых и упругих тел / А. С. Горобцов //Справочник. Инженерный журнал. М: Машиностроение, 2004. — №
9.- с. 40 — 43. (Система Фрунд). MSC.
39.Горобцов А. С. Развитие теории управляемости и устойчивости движения автомобиля на базе пространственных компьютерных моделей/ А. С. Горобцов, Р. П. Кушвид, С. К. Карцов // М. Машиностроение. — 2004 г. №1. — с. 34—40.
40.Гохман Ш.М. Устойчивость автомобильного поезда при движении на повороте постоянного радиуса. - Дисс. канд. техн. наук, 1959. - 159 с.
41.Гредескул А.Б. Выбор соотношения тормозных сил на осях седельного тягача и полуприцепа. - Автомобильная промышленность, 1962, № 8, с. 18-21.
42.Гродко JI.H., Левин Н.Е. Определение критической скорости автопоезда с одноосными прицепами. - Автомобильная промышленность 1976, № 10, с. 25-26.
43.Гродко Л.Н., Ечеистов Ю.А., Левин Н.Е. Некоторые критерии устойчивости автопоезда. - Автомобильная промышленность,1977, № 2, с. 20-22.
44.Дайбол В.Б., Хакен Д.Х. Поперечная устойчивость автомобильных прицепов. - Труды американского общества инженеров-механиков, серия "Конструирование и технология машиностроения". - М., 1969, №
4.- 59 с.
45.Додонов Б.М., Ильичев А.В. Алгоритм исследования на ЭВМ криволинейного курсового движения полуприцепа. - Сборник научных трудов МАДИ, М., 1981, с. 92-99.
46.Жуков А.В. К вопросу о влиянии мокрорельефа дороги на поперечную устойчивость полуприцепа. - Автомобильная промышленность, 1968, № 1, с. 12-13.
47.Жуков А.В. Исследование влияния микропрофиля дорог на заносы автопоезда на повороте. - Автомобильная промышленность, 1974, № 2, с. 17-19.
97