

704
.pdf5. Для контроля правильности вычислений определяется дирекционный угол второго направления, для этого используются координаты исходного пункта Т2 и вычисленные координаты пункта Р.
tg P T2 (У2 УР ) . (X2 XP )
Расхождение между вычисленными дирекционными углами в обоих решениях не должно превышать 1''.
Второе решение
Используются координаты исходных пунктов Т1, Т2, Т4, измеренные углы 1 , 3
1. Вычисляется дирекционный угол начального направления от твердого пункта на искомый пункт по формуле Деламбра:
tg T1 P |
|
(У |
2 У1) сtg 1 (У1 У4 ) ctg 3 ( X 4 |
X 2 ) |
|
||
(X2 |
X1) сtg 1 (X1 X 4 ) ctg 3 (У4 |
У2 ) , |
|||||
|
|
||||||
где Х1 ,У1 , Х 2, ,У2 , Х 4 ,У4 – соответственно координаты пунктов Т1, Т2, Т4;
1 , 3 – углы, измеренные от начального направления соответ-ственно до второго и четвертого направлений.
Значение дирекционного угла определяется по знаку tg T1 P .
2. Выполняется контроль вычислений.
(Х 4 Х 2 ) (Х 2 Х1 ) (Х1 Х 4 ) 0; (У4 У2 ) (У2 У1 ) (У1 У4 ) 0 .
3. Вычисляются дирекционные углы 2-го и 4-го направлений от определяемого пункта на твердые пункты по формулам:
Р Т1 Т1 Р 1800 ;
Р Т 2 Р Т1 1 ;
Р Т 4 Р Т1 3 ,
где Т1 Р - дирекционный угол начального направления;1 , 3 – углы, измеренные от начального направления Р-Т1.
21
4. Определяются дважды координаты пункта Р по формулам Гаусса:
X |
|
X |
|
|
|
( X1 X 4 ) tg T1 P (У1 У 4 ) |
|
X |
|
|
A |
; |
|||
P |
4 |
|
4 |
|
|
||||||||||
|
|
|
|
tg T1 P tg T 4 P |
|
|
K |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|||||
X |
|
X |
|
|
( X1 X 4 ) tg T1 P (У1 У 4 ) |
X |
|
|
В |
|
; |
||||
P |
1 |
|
1 |
|
|||||||||||
|
|
|
|
|
tg T1 P tg T 4 P |
|
K |
|
|||||||
|
|
|
|
|
|
|
|
|
|
||||||
УР У4 (Х Р Х 4 )tg T 4 P ;
УР У1 (Х Р Х1 )tg T1 P .
5.Для контроля правильности вычислений снова определяется дирекционный угол второго направления по формуле:
tg T2 P (У2 УP ) .
(X2 XP )
Для вычислений предлагается использовать таблицы в приложении 3. В приложении 4 даны варианты исходных данных для определения координат пункта Р обратной угловой засечкой. В приложении 5 даны схемы засечек к вариантам. Пример расчета для первого варианта приводится
ниже в таблицах 5,6.
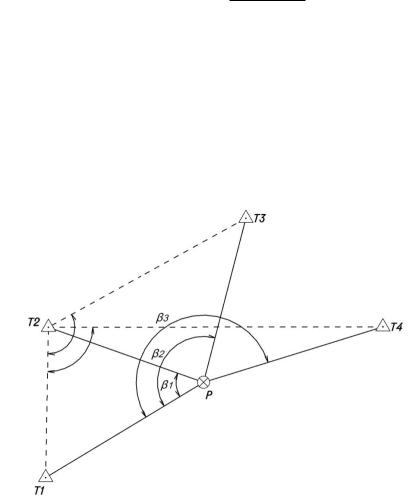
На рис.15 дана схема засечки для 1 варианта, который дается в качестве примера определения координат пункта Р.
Рис. 15. Ориентированная схема засечки (1 вариант)
22
Таблица 5
Определение координат пункта Р из решения обратной угловой засечки (с использованием формулы Деламбра)
Решение 1
Исходные данные: координаты пунктов Т1, Т2, Т3; измеренные углы β1, β2
|
У1 |
115,330 |
Х1 |
310,610 |
(Х1–Х3)×tg α Т1-Р |
-312,199 |
(Х1–Х3)×tg αТ3-Р |
-48,604 |
|
У2 |
117,310 |
Х2 |
420,110 |
(У1 –У3) |
-145,420 |
(У1 –У3) |
-145,420 |
|
У3 |
260,750 |
Х3 |
499,520 |
|
|
|
|
|
У2 – У1 |
1,980 |
Х2 – Х1 |
109,500 |
А |
-166,779 |
В |
96,816 |
|
У3 – У2 |
143,440 |
Х3 – Х2 |
79,410 |
ХP – Х3 |
-119,525 |
ХP – Х1 |
69,384 |
23 |
У1 – У3 |
-145,420 |
Х1 – Х3 |
-188,910 |
Х3 |
499,520 |
Х1 |
310,610 |
контроль |
0,000 |
|
0,000 |
ХP |
379,995 |
ХP |
379,994 |
|
|
|
|||||||
|
β1 |
50°46'23" |
β2 |
135°36'24" |
(ХP–Х3)×tg α Т3-Р |
-30,752 |
(ХP–Х3)×tg αТ1-Р |
114,666 |
|
сtg β1 |
0,816363 |
сtg β2 |
-1,021404 |
У3 |
260,750 |
У1 |
115,330 |
|
(У2 - У1)×сtg β1 |
1,616 |
(Х2–Х1)×сtg β1 |
89,392 |
УР |
229,998 |
УР |
229,996 |
|
(У1–У3)×сtg β2 |
148,533 |
(Х1–Х3)×сtg β2 |
192,953 |
Контроль |
|
|
|
|
(Х3 – Х2) |
79,410 |
(У3–У2) |
143,440 |
У2 - УР |
-112,687 |
Окончательные значения |
|
|
|
229,559 |
r =58°49'19" |
138,905 |
Х2 – ХP |
40,115 |
|
|
|
tg αT1-P |
1,652633 |
αР-Т1 |
238°49'19" |
tg αР-Т2 |
-2,809099 |
αР-Т1 |
238°49'19" |
|
tg αT3-P |
0,257289 |
αР-Т2 |
289°35'42" |
rР- Т2 |
70°24'18" |
αР-Т2 |
289°35'42" |
|
К |
1,395344 |
αР-Т3 |
14°25'43" |
αР- Т2 |
289°35'42" |
αР-Т3 |
14°25'43" |
23
|
|
|
|
|
|
|
|
|
Таблица 6 |
|
|
Решение 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Исходные данные: |
|||
|
|
|
|
|
|
координаты пунктов Т1,Т2, Т4; |
||||
|
|
|
|
|
|
|
измеренные углы β1, β3 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
У1 |
115,330 |
Х1 |
310,610 |
(Х1–Х4)×tg αТ1-Р |
-181,514 |
(Х1–Х4)×tg αТ4-Р |
-353,682 |
||
|
У2 |
117,310 |
Х2 |
420,110 |
(У1 –У4) |
-244,920 |
(У1 –У4) |
-244,920 |
||
|
У4 |
360,250 |
Х4 |
420,450 |
|
|
|
|
|
|
|
У2 - У1 |
1,980 |
Х2 – Х1 |
109,500 |
А |
63,406 |
В |
-108,762 |
||
|
У4 – У2 |
242,940 |
Х4 – Х2 |
0,340 |
ХP – Х4 |
-40,452 |
ХP – Х1 |
69,388 |
||
|
У1 – У4 |
-244,920 |
Х1 – Х4 |
-109,840 |
Х4 |
420,450 |
Х1 |
310,610 |
||
24 |
контроль |
0,000 |
|
0,000 |
ХP |
379,998 |
ХP |
379,998 |
||
β1 |
50°46'23" |
β3 |
193°55'36" |
(ХP–Х4)×tg αТ4-Р |
-130,254 |
(ХP–Х1)×tg αТ1-Р |
114,666 |
|||
|
||||||||||
|
сtg β1 |
0,816363 |
сtg β3 |
4,032763 |
У4 |
360,250 |
У1 |
115,330 |
||
|
(У2-У1)×сtg β1 |
1,616 |
(Х2–Х1)×сtg β1 |
89,392 |
УР |
229,996 |
УР |
229,996 |
||
|
(У1–У4)×сtg β3 |
-987,704 |
(Х1–Х4)×сtg β3 |
-442,959 |
Контроль |
|
|
|
|
|
|
(Х4 – Х2) |
0,340 |
(У4–У2) |
242,940 |
У2 - УР |
-112,686 |
Окончательные значения |
|||
|
|
-985,748 |
r =58°49'14" |
-596,507 |
Х2 – ХP |
40,112 |
|
|
|
|
|
tg αT1-P |
1,652534 |
αР-Т1 |
238°49'14" |
tg αР-Т2 |
2,809284 |
αР-Т1 |
|
238°49'14" |
|
|
tg αT4-P |
3,219975 |
αР-Т2 |
289°35'37" |
rР- Т2 |
70°24'22" |
αР-Т2 |
|
289°35'38" |
|
|
К |
-1,567441 |
αР-Т4 |
72°44'50" |
αР-Т2 |
289°35'38 |
αР-Т4 |
|
72°44'50" |
|
|
|
|
|
|
|
" |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
24
2.2. Оценка точности положения определяемого пункта P обратной угловой засечкой
Расхождение в значениях координат, полученных из двух решений, не должно превышать предельной среднеквадратической погрешности положения (3Мr). Расхождение рассчитывается по формуле:
|
|
|
|
|
|
|
|
|
|
|
|
r ( X ' |
X |
'' |
)2 (У ' |
У '' |
)2 |
3M |
r |
|
|
|
|
P |
|
P |
P |
P |
|
|
|
|
|
|
|
|
|||||||
r |
(379,994 379,998)2 |
(229,997 229,996)2 |
0,004м, |
|||||||
где Х Р' ,УР' , Х Р'' ,УР'' - координаты пункта Р, вычисленные соответственно из первого и второго решений.
Средняя квадратическая погрешность расхождения рассчитывается по формуле:
M r 
 M12 M 22 ,
M12 M 22 ,
где М1, М2 – средние квадратические погрешности положения пункта, определенные соответственно из первого и второго решений. Они рассчитываются по формулам:
|
|
|
|
( |
|
|
|
S |
Р Т1 |
) |
2 |
( |
|
S |
Р Т 3 |
) |
2 |
|
|
||||||||||||
М |
|
m S |
|
SТ1 Т 2 |
|
|
|
SТ 2 Т 3 |
|
|
|
|
|
|
; |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
1 |
Р Т 2 |
|
|
|
sin( T1T 2T 3 |
2 ) |
|
|
|||||||||||||||||||||||
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
( |
|
|
|
S |
Р Т1 |
|
) |
2 |
( |
S |
Р Т 4 |
|
) |
2 |
|
|
|||||||||||
М |
2 m S |
|
|
|
SТ1 Т 2 |
|
|
SТ 2 Т 4 |
|
|
|
|
|
|
|
, |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Р Т 2 |
|
|
|
sin(T1T 2T 4 3 ) |
|
|
|||||||||||||||||||||||||
|
|
|
|||||||||||||||||||||||||||||
где SP Т1 , SP T 2 , SP T 3 , SP T 4 , ST1 T 2 , ST 2 T 3 , ST 2 T 4 |
– |
расстояния между соответствую- |
|||||||||||||||||||||||||||||
щими пунктами; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Т1Т2Т3, Т1Т2Т4 – углы при вершине пункта Т2, расположенные соответственно напротив измеренных углов 2 и 3 .
Указанные длины сторон и углы рассчитываются, для этого используются координаты исходных пунктов Т1, Т2, Т3, Т4 и вычисленные координаты пункта Р.
Дирекционные углы между исходными пунктами определяются из решения обратной геодезической задачи по формулам:
tgr |
|
y1 |
y2 |
|
1,980 |
0,018082 ; |
|
|
|
||||
T 2T1 |
|
x1 |
x2 |
|
109,500 |
|
|
|
|
|
25
r |
|
1о02'09"; |
|
|
Т 2 Т1 |
=181о02'09"; |
|||||||||||
Т 2 Т1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
tgr |
|
|
|
|
y3 |
y2 |
|
143,440 |
|
1,806322 ; |
|||||||
|
|
|
|
|
|
|
|
|
|||||||||
T 2T 3 |
|
|
x3 |
x2 |
|
79,410 |
|
|
|||||||||
|
|
|
|
|
|
|
|
||||||||||
r |
61о01' 50''; |
|
|
Т 2 Т 3 |
61о01' 50''; |
||||||||||||
Т 2 Т 3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
tgr |
|
|
|
y4 |
y2 |
|
242,940 |
714,729 ; |
|||||||||
|
|
|
|
|
|
|
|||||||||||
T 2T 4 |
|
|
x4 |
x2 |
|
|
|
0,340 |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
||||||||
r |
89о55' 11''; |
|
|
Т 2 Т 4 |
89о55' 11''. |
||||||||||||
Т 2 Т 4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Вычисление углов T1T 2T 3, T1T 2T 4
T1T 2T3 T 2T1 T 2T 3 ,T1T 2T 4 Т 2Т1 T 2T 4 .
T1T 2T 3 T 2T1 T 2T 3 181о02'09'' - 61о01' 50'' = 120о00'19'';T1T 2T 4 Т 2Т1 T 2T 4 181о02'09'' - 89о55' 11'' = 91о06' 58''.
Длины сторон вычисляются по формулам:
|
|
|
Х |
|
У |
|
S X 2 У 2 |
|
|||||
|
|
|||||
cos |
sin |
|||||
|
|
|
|
|||
S |
Т 2 Т1 |
|
X 2 |
У2 |
; |
|
|
Т1 Т 2 |
Т1 Т2 |
|
SТ 2 Т1 
 ( 109,500)2 ( 1,980)2 109,518м
( 109,500)2 ( 1,980)2 109,518м
SТ 2 Т1 |
|
УТ1-Т2 |
|
|
; SТ 2 Т1 |
|
109,500 |
109,527м |
|||||
sin |
Т 2 Т1 |
sin181 02'09'' |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
S |
|
|
|
XТ1-Т2 |
. |
|
|||
|
|
|
|
Т 2 Т1 |
|
|
|
|
|||||
|
|
|
|
|
|
|
cos Т 2 Т1 |
|
|||||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
1,980 |
|
||||||
|
|
SТ 2 Т1 |
|
|
109,518м |
||||||||
|
|
cos181 02'09'' |
|||||||||||
26

Аналогично вычисляются остальные длины.
SP T1 =134,031м S
S
P T 2
P T 4
= 119,615м SP T 3 = 123,412м =136,386м
SТ 2 T 3 =163,954м |
SТ 2 T 4 =242,94м |
Средняя квадратическая погрешность измерения угла m =10'',
ρ=206265".
|
|
|
|
|
( |
134,031 |
) |
2 |
( |
123,412 |
) |
2 |
|
|
|
|
|
|
|
|
||||||||
М1 10 119,615 |
|
|
109,518 |
|
163,954 |
|
|
|
|
|
|
|
|
|
0,009м |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
206265 |
|
sin(120 00'19'' 135 36' 27'' ) |
|
|
||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
( |
134,031 |
) |
2 |
( |
136,386 |
) |
2 |
|
|
|
|
|
|
|
||||||||||
М 2 10 119,615 |
|
109,518 |
|
|
242,940 |
|
|
|
|
|
0,008м |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|||||||||||||||||||||||||
206265 |
|
sin(91 06'58'' 193 55'36'' ) |
|
|
||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
||||||||||||||||||||||
M |
r |
|
|
0,0092 0,0082 |
|
0,012м |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r 3M r 0,004м < 0,036м, |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
Расхождение не превышает предельно допустимой погрешности. |
||||||||||||||||||||||||||||
Следовательно координаты пункта Р определены верно. |
||||||||||||||||||||||||||||
Средние значения координат пункта Р из двух решений равны |
||||||||||||||||||||||||||||
Х Р 379,998м , |
|
УР 229,996м . |
||||||||||||||||||||||||||
2.3.Определение координат пункта обратной угловой засечкой
впрограмме Credo Dat 4
Вариант 1
1. Запускаем ярлык программы Credo Dat 4 LITE, который расположен на рабочем столе компьютера. Выбираем необходимую рабочую область. Для этого в главном меню открываем Вид/Рабочая область/CREDO DAT 3.X. Для дополнения интерфейса в правой половине экрана программы открываем дополни-
тельные вкладки: Вид/История, Вид/Свойства.
Для корректного решения в процессе обработки данных устанавливаем необходимые настройки свойств проекта программы. Для этого в строке главного меню открываем вкладку Файл/Свойства проекта и устанавливаем необходимые настройки.
27
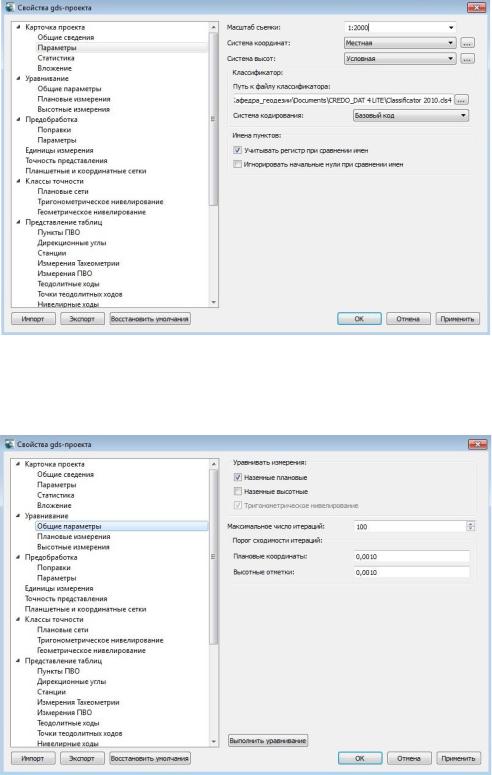
В параметрах карточки проекта устанавливаем Масштаб съемки – 1:2000
(рис. 16).
Рис. 16. Настройка масштаба съемки
В общих параметрах настройки уравнивания оставляем только Уравни-
вать наземные плановые измерения (рис. 17).
Рис. 17. Настройка уравнивания
Единицы измерения и точность представления данных устанавливает-
ся в соответствии с исходными данными (рис. 18,19).
28
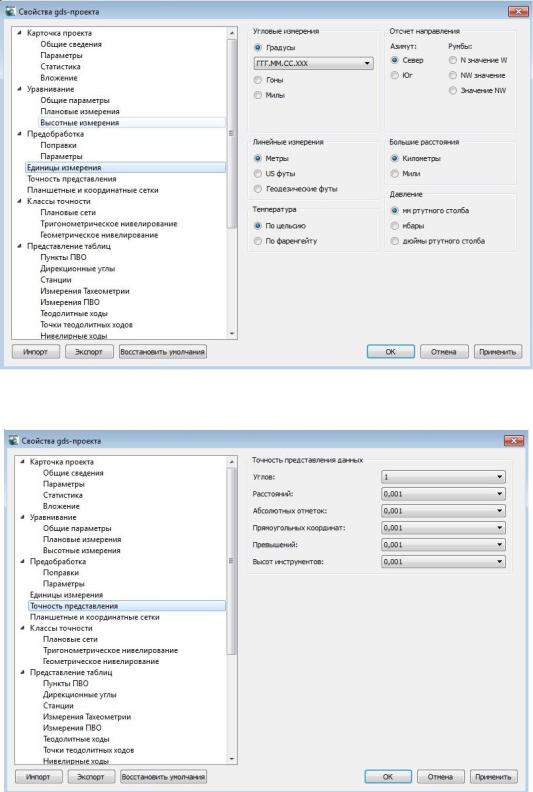
Рис. 18. Настройка единиц измерения
Рис. 19. Настройка представления данных
Класс точности плановых измерений – устанавливаем соответствующий
полигонометрическому ходу 2 разряда (рис. 20).
29
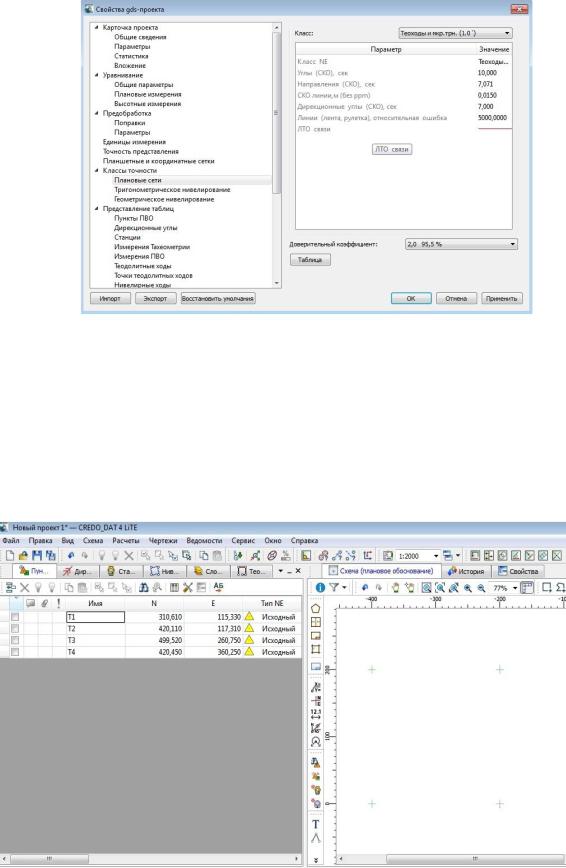
Рис. 20. Настройка класса точности плановых сетей
После настроек свойств проекта переходим к вводу координат исходных пунктов в таблице Пункты ПВО. Имена пунктов и значения координат вводятся клавиатуры вручную, с подтверждением клавишей Enter. Для исключения разногласия имен пунктов в программе, вводим их на английской раскладке клавиатуры компьютера. После ввода данных устанавливаем для всех пунктов тип координат (тип NE) – Исходный (рис. 21).
Рис. 21. Ввод координат исходных пунктов
30