10843
.pdf191
ние между упорами) можно определить ширину головки рельса q и судить о её износе.
При съёмке подкрановых путей большой протяженности следует применять способ последовательных створов с перекрытием не менее двух точек предыдущего и последующего створов.
• Способ фотограмметрических створов, описанный в работе (Лященко Ю.К. Исследование точности последовательных фотограмметрических створов // Инженерная геодезия. – 1984, – №27. – С. 65-68) заключается в том, что общий створ 1-n (рис. 133а) длиной до 500 м разбивается на примерно равные части. Фотографирование производится с моста крана так, чтобы последняя измеряемая точка на снимке предыдущего частного створа являлась начальной точкой для последующего створа. При этом оптическая ось фотокамеры при съёмке всякий раз ориентируется на последнюю точку n общего створа. Автор способа утверждает, что он не требует предварительной маркировки оси рельса и даёт наилучшие результаты при длине частного створа около 40 м.
Л
ln n
Sn li
Si
l1 1
Р
Рис. 135. Схема фотографического способа контроля прямолинейности рельса
Считаем перспективным развитие этого способа путём использования цифровых фотоаппаратов, совместимых с персональным компьютером. Здесь можно поступить двояко.
Во-первых, отцентрировав фотоаппарат в начальной точке 1 (рис. 135) и сфотографировав рельс по направлению на конечную точку n, можно сразу от этой референтной линии 1-n определять отклонения li от прямой
(рис. 133а).
Во-втором случае можно производить измерения от произвольной референтной линии РЛ. Отклонения li вычисляют по разности ln и l1 и расстояниям S. В обоих случаях переход от значений l в мегапикселях к метрической
192
системе единиц осуществляется путём масштабирования снимков с помощью, например, горизонтально расположенной нивелирной рейки.
6.2. Определение ширины колеи подкранового пути
Расстояние между подкрановыми рельсами мостовых кранов (ширину колеи) можно определять непосредственным или косвенным способами. Способы непосредственного измерения ширины колеи подразделяются на контактные и механические. Контактный способ заключается в измерении расстояния между осями рельсов с помощью обычной рулетки или проволоки. Механический способ основан на использовании различных приспособлений и устройств. Сущность косвенного способа заключается в том, что из различных линейно-угловых геодезических построений определяют плановые координаты осевых точек рельсов, по которым вычисляют ширину колеи. Заметим, что эти координаты служат также для определения непрямолинейности рельсовых осей. Если в процессе съёмки получают пространственные координаты осевых точек, то можно осуществить комплексный контроль подкрановых путей в плане и по высоте. В работе [48] детально описаны различные непосредственные и косвенные способы измерения ширины колеи мостовых кранов. Здесь и далее остановимся на способах, основанных на использовании лазерной рулетки, лазерно-зеркального устройства и электронного тахеометра.
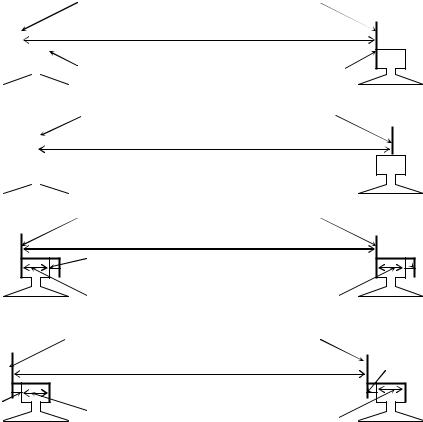
• Измерения лазерной рулеткой расстояний L между осями рельсов мостовых кранов может осуществлялось по трем схемам [66]. В первой схеме (рис. 136а) рулетка прикладывается к внутренней грани правого рельса и измеряется расстояние до экрана– отражателя, приложенного к внешней грани левого рельса. Однако здесь на точность измерений может оказывать влияние односторонний износ боковых граней подкрановых рельсов. Избежать этого влияния можно (рис. 136б), измеряя расстояние между упором для рулетки и экраном, установленных на оси рельсов с помощью специальных центрирующих устройств, например, вилки.
Другой способ измерения расстояний L непосредственно между осями подкрановых рельсов предусматривает использование упора и экрана, закрепленных на основаниях с двумя вертикальными щёками (рис. 136в, г). Расстояние между щёками основания упора и основания экрана одинаковы и превышают ширину головки рельса q на величину δ . Вначале измеряют расстояние L1, когда щёки оснований упора и экрана прилегают соответственно к внутренней грани правого рельса и к внешней грани левого рельса (рис. 136в). Затем измеряют расстояние L2, когда щёки прилегают соответственно к внешней грани правого рельса и к внутренней грани левого рельса (рис. 136г).
193
экран упор
а |
|
|
|
|
|
L |
||||
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
левый рельс |
правый рельс |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
экран |
упор |
|
|
|
|
|
|
|
|
|
||
б |
|
|
L |
|||||||
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
экран |
упор |
|
в |
L1 |
δ2 |
|
|
δ1 |
|
|
|
q1 |
q2 |
|
г |
экран |
упор |
|
L2 |
δ2 |
||
|
|||
δ1 |
q1 |
q2 |
|
|
Рис. 136. Схемы измерения расстояний между осями подкрановых рельсов лазерной рулеткой
|
|
Тогда в первом случае L = L1 – q1/2 + q2/2 , а во втором случае L = L2 – |
|
– |
δ1 |
– q1/2 |
+ δ2 + q2/2 . Сложив почленно эти два равенства и учитывая, что (δ1 |
+ |
q1) |
= (δ2 |
+ q2), получим L = 1/2 ( L1 + L2), следовательно, среднее арифмети- |
ческое из двух результатов измерений даст результат, приведённый к оси рельсов. Закрепление упора и экрана на головках рельсов может осуществляется с помощью струбцин или магнитных фиксаторов.
Наконец, измерение расстояний между рельсами может осуществлять один человек, используя в качестве упора шейку одного рельса, а в качестве экрана
194
шейку противоположного рельса, вводя в результаты измерений необходимые поправки.
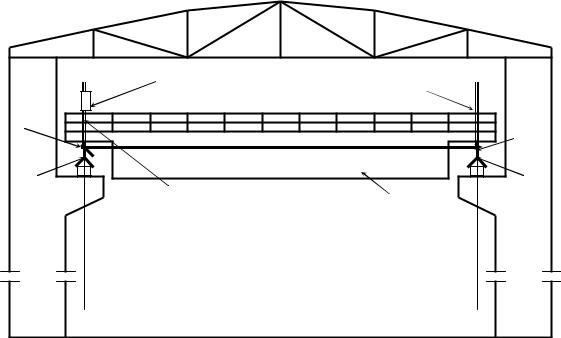
Основным недостатком непосредственных измерений ширины колеи кранового пути с помощью лазерной рулетки является необходимость выхода наблюдателя на подкрановый путь. Исключить этот недостаток можно, используя способ дистанционных измерений с тормозных площадок крана с помощью лазернозеркального устройства ЛЗУ (рис. 137).
• Измерения с помощью ЛЗУ. Для этого удлинительные штанги ЛЗУ и эк- рана-отражателя имеют на своих концах вилки, позволяющие устанавливать ЛЗУ и экран на осях подкрановых рельсов, контролируя вертикальность каждой штанги по круглому уровню.
|
|
лазерно-зеркальное |
удлинительная |
экранотражатель |
|
|
устройство |
||
|
|
штанга |
||
|
|
|
||
зеркало |
|
|
|
|
|
|
|
L |
|
|
|
|
|
|
вилка |
|
удлинительная |
|
вилка |
|
|
кран |
|
|
|
|
штанга |
|
|
|
|
|
|
|
ось левого |
рельса |
|
ось правого |
рельса |
Рис. 137. Схема измерения расстояний между осями подкрановых рельсов |
||||
|
|
лазерно-зеркальным устройством |
|
|
Установив ЛЗУ на оси , например, левого рельса, а экран-отражатель на оси правого рельса, включают лазерную рулетку, направляют лазерный пучок на экран и, вычтя из её показаний постоянное слагаемое ЛЗУ, получают ширину колеи L . Аналогичным образом можно измерить ширину колеи в любом месте без выхода персонала на подкрановый путь.
Если расположить ЛЗУ примерно в середине моста крана и измерить два расстояния до экранов-отражателей, установленных на осях левого и правого рельсов, то сумма этих расстояний будет равна ширине колеи. Такая методика в
196
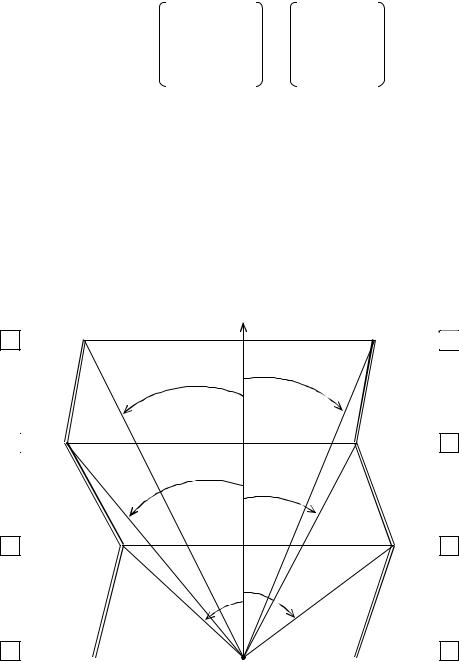
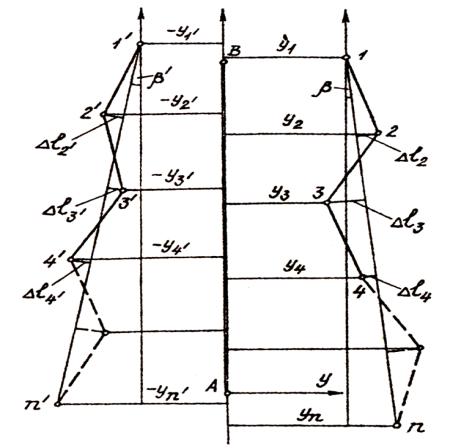
производится с точки В , причём для контроля вновь определяют координаты средних точек 5 и 5′. Фактическую ширину колеи Li вычисляют по формуле
Li = yi – y i′ , ( i, i′ = 1… n ), |
(151) |
и определяют её отклонения от проектного значения L0 как разности Li – L 0 . Поскольку линия АВ выбирается параллельно подкрановым рельсам, то их
отклонение l от прямой вычисляют следующим образом:
п |
= yi − |
∑ yi |
l л = |
L + |
l п |
, |
(152) |
li |
, |
||||||
|
|
n |
i′ |
i |
i |
|
|
|
|
|
|
|
|
|
соответственно для правого и левого рельсов, причем положительные значения l говорят о том, что рельсы отклонены вправо, отрицательные – влево.
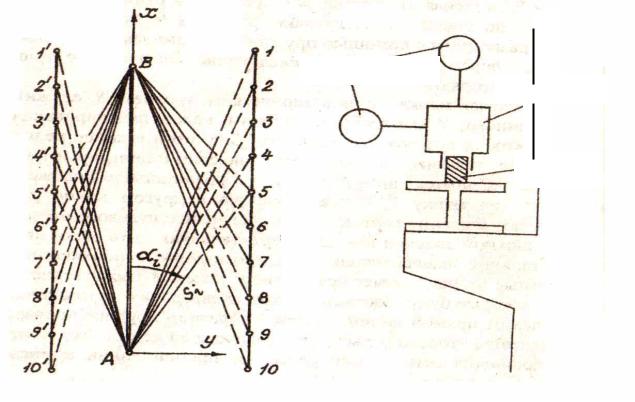
В том случае, когда линия АВ непараллельная подкрановым рельсам (рис. 139), обработку результатов измерений можно производить следующим образом.
Х
Рис. 139. Схема определения отклонений от референтных линий

197
Вначале вычисляют углы β и β′ непараллельности базиса АВ и линий, соединяющих начальные 1 и 1′ и конечные n и n′ точки правого и левого рельсов:
β = arctg |
y1,n |
, |
β'= arctg |
y1/ ,n |
/ |
, |
(153) |
x1,n |
|
|
|||||
|
|
|
x1/ ,n/ |
|
|||
где ∆х1,n = x1 – x n , ∆х1’,n’ = x1’ – x n’ , ∆y1,n = y1 – y n , ∆y1’,n’ = y1’ – y n’ .
В формулах (153) ∆х всегда величина положительная, в то время как ∆y может быть как положительной, так и отрицательной. Следовательно, углы β и β′ могут иметь знак «плюс», что говорит об отклонении точки n(n′) влево от линии параллельной АВ , и знак «минус», соответствующий отклонению точки n(n′) вправо от этой линии.
Нестворность li и li’ (i, i’ = 2, 3,…, n-1) правого и левого рельсов относительно референтных линий 1– n и 1′– n′ находят из выражений:
li =∆y1,i cosβ – ∆х1,i sinβ, |
li’ =∆y1’ ,i’ cosβ' – ∆х1’,i’ sinβ', |
(154) |
||||||
где ∆х1,i = х1 – хi , ∆х1’ ,i’ = х1’ – хi’ , ∆y1,i = y1 – y i , |
∆y1’ ,i’ = y1’ – y i’ . |
|
|
|||||
В формулах (154) необходимо учитывать знаки: ∆х (величина всегда поло- |
||||||||
жительная), ∆y и β . При этом знак «плюс» у |
l |
означает отклонение рельса вле- |
||||||
во от референтной линии, знак «минус» – |
отклонение вправо. |
|
|
|||||
По прямоугольным координатам противолежащих точек |
i и i’ |
вычисляют |
||||||
фактическую ширину колеи: |
|
|
|
|
|
|
|
|
L = |
|
|
|
|
|
|
|
|
|
x2 |
+ |
y2 |
|
, |
|
(155) |
|
i |
i ,i' |
|
i ,i' |
|
|
|
||
где ∆хi,i’ = хi – хi’ , ∆yi,i’ = yi – y i’ . |
|
|
|
|
|
строят график пла- |
||
По вычисленным отклонениям li |
и |
ширине колеи Li |
||||||
нового положения подкрановых рельсов. |
|
|
|
|
|
|
|
|
Из других однобазисных способов следует сказать об определении траектории движения крана и отклонении подкранового пути [98]. Для этого двумя электронными тахеометрами, установленными вблизи рельсов, определяют координаты их осевых точек и одновременно координаты двух точек крана над осями рельсов.
Вообще говоря, методика использования электронного тахеометра предусматривает в конечном итоге определение координат x, y, z осевых точек подкрановых рельсов методом полярной пространственной засечки. Зная условный дирекционный угол α , угол наклона δ и наклонное расстояние S на каждую съёмочную точку, можно определить коэффициенты a, b, c исходных уравнений ошибок [47] для любой съёмочной точки:
198
a = |
g sin α |
, |
b = |
g cosα |
, |
c |
= 0, |
|
|
|
|
|
|||||||
α |
cosδ |
|
α |
cosδ |
α |
|
|
||
|
|
|
|
|
|
||||
aδ = g cosα sinδ , |
bδ = g sinα sinδ , |
cδ |
= −g cosδ , |
(156) |
|||||
as = cosα cosδ , |
bs = sinα cosδ , |
cs |
= sinδ , |
|
|||||
причем в этих формулах градиент g = ρ : S , а S – |
наклонная длина. |
|
|||||||
Затем следует составить матрицу А коэффициентов исходных уравнений |
|||||||||
ошибок: |
|
|
|
|
|
|
|
|
|
|
|
|
aα |
bα |
cα |
|
|
|
|
|
A = |
aδ |
bδ |
cδ |
|
|
(157) |
||
|
|
|
as |
bs |
cs |
|
|
|
|
и найти матрицу N коэффициентов системы нормальных уравнений: |
|
||||||||
|
[aa] |
[ab] |
[ac] |
|
|
|
|
|
|
N = ATA = [ab] |
[bb] |
[bc] . |
|
|
(158) |
||||
|
[ac] [bc] [cc] |
|
|
|
|
|
|||
Для этого вначале найдем матрицы |
Nуг |
и |
Nлин , относящиеся соответст- |
||||||
венно только к угловым и только к линейным измерениям. |
|
||||||||
Матрицу N можно получить следующим образом: |
|
||||||||
N = Nлин + рα,δ Nуг , (при рs = 1) , |
|
||||||||
N = рsNлин + Nуг , (при рα,δ = 1) , |
(159) |
||||||||
N = рsNлин + рα,δ Nуг , (при рs ≠ рα,δ ≠ 1) . |
|
||||||||
Что касается выбора весов, то если принять вес линейных измерений рs = 1, то вес угловых измерений рα,δ = µ2/m2α,δ , где µ средняя квадратическая ошибка единицы веса; mα,δ – средняя квадратическая ошибка измерения α и δ . Если принять рα,δ = 1, тогда рs = µ2/m2s , где ms – средняя квадратическая ошибка линейных измерений. При этом размерности µ и mα,δ,s должны в обязательном порядке соответствовать размерности градиентов g в формулах (156). Так, если эти градиенты имеют размерность с/см , то и µ , mα,δ (при рα,δ = 1) должны быть выражены в секундах, а ms – в сантиметрах. При рs = 1 размерности µ и ms в сантиметрах, а mα,δ – в секундах.