

10500
.pdf21
формирования на фотоизображениях вертикальной референтной линии,
которая служит базой для проведения всех измерений.
Рис. 4. Смартфон с программой Plumb-bob
Использование беспилотных летательных аппаратов, это технология, которая переводит на принципиально новый уровень проведение всех работ, связанных с аэрофотосъемкой, а следовательно дальнейшее совершенствование фотограмметрических методов. Данное направление также представляется перспективных для развития методов измерения ГППФ высотных конструкций.
Видео измерительные системы [14, 15] позволяют формировать и обрабатывать видеоизображения исследуемого объекта с помощью компьютерных технологий.
Анализ всех перечисленным методов позволяет сделать вывод о том,
что наибольшее предпочтение при проведении измерений геометрических параметров крупногабаритных, труднодоступных объектов типа башенных и других сооружений может быть отдано фотограмметрическим методам,
поскольку они обладают несомненными и явными преимуществами перед другими методами. К ним можно отнести относительно низкую стоимость и доступность применяемого оборудования, возможность применения в полевых условиях, относительно невысокие требования к квалификации персонала. Эти преимущества позволяют широко использовать фотограмметрические методы в условиях предприятий малого и среднего
22
бизнеса, для которых не всегда возможно приобретение дорогостоящего оборудования.
1.2. Выводы по 1 главе
На основе анализа методов определения ГППФ высотных сооружений разработана их классификация.
Установлено, что определение ГППФ высотных сооружений в процессе эксплуатации сопряжено с трудностями, вызванными их доступностью для выполнения измерений. В этих условиях полную информацию о пространственном положении и форме башенных сооружений можно получить путём совершенствования известных и разработки новых методов определения их геометрических параметров.
23
Глава 2. ОПРЕДЕЛЕНИЕ ГППФ СТРОИТЕЛЬНЫХ КОНСТРУКЦИЙ ФОТОГРАММЕТРИЧЕСКИМ МЕТОДОМ
В работе [81] в результате анализа существующих методов определения параметров положения и формы строительных конструкций зданий и сооружений показано, что современный тренд развития средств измерения направлен в сторону новых бесконтактных и фотограмметрических методов. При этом технической основой является использование ручных безотражательных дальномеров, электронных тахеометров, цифровых фотокамер в комплексе с современными компьютерными технологиями. Одним из наиболее перспективных методов определения параметров положения и формы крупногабаритных труднодоступных строительных объектов представляется вариант фотограмметрического метода на основе фотоизображений, полученных фотокамерой на штативе с определенной точки стояния.
2.1. Основные положения варианта фотограмметрического метода для определения ГППФ сооружений
Появившиеся в последнее десятилетие ПЗС-матрицы, на основе которых функционируют неметрические цифровые фото и видео камеры,
позволяют существенным образом сократить трудоемкость применения фотограмметрических методов [130]. Камеры подобного типа позволяют получать фотоснимки, координированные в растровом пространстве. Это означает, что единицами измерения на подобных фотоснимках в растровых координатах являются пикселы. В этом случае наличие современной компьютерной техники и систем редактирования растровых фотоизображений, полученных фотокамерами данного типа, формируют условия для разработки различных вариантов фотограмметрического метода измерения геометрических параметров протяженных объектов, включая высотные сооружения [150]. Для этого полученное фотокамерой изображение подвергается обработке с использованием стандартных систем

24
редактирования растровых изображений. Для обеспечения возможности подобной обработки и измерений необходимо наличие на изображении вертикальной референтной линии. Кроме того, необходимо снимок отмасштабировать для перевода результатов в линейные единицы. Для выполнения масштабирования фотокамера подвергается калибровке.
В работе [157] приведено исследование влияния различных вариантов формирования вертикальных референтных линий при замерах крена башни треугольной формы путем сопоставления результатов с полученными методом вертикального проецирования.
Наиболее простым способом формирования референтной линии является расположение шнурового отвеса на фоне фотографируемого объекта. Рис.5 иллюстрирует изображение телебашни с референтной линией как при вертикальном расположении фотокамеры (Рис. 5а), так и при наклонном положении камеры (Рис. 2б).
Рис. 5. Фотографии телебашни и шнурового отвеса

25
Референтная линия может занимать разное положение относительно оси сооружения, например, трубы (Рис.6). В любом случае замеряются растровые расстояния lВ, lВ и l’Н, l’Н от краёв сооружения до референтной линии вверху и внизу соответственно. Растровые расстояния от линии до оси трубы вычисляются вверху В = (ПВ – ЛВ)/2 и внизу Н = (ПН – ЛН )/2 (Рис.3а)
или В = (ЛВ – ПВ)/2 и Н = (ЛН – ПН)/2 (Рис.3б). Крен трубы К в растровых единицах вычисляется как разность величин В и Н. Перевод крена в линейные единицы производится по формуле К = ВδВ –НδН, где δВ и δН –
метрическая цена пиксела соответственно для двух крайних сечений сооружения, мм/пкс. В случае совпадения референтной линии с центром верхнего сечения трубы (Рис.7) крен будет равен К = НδН .
Рис. 6. Схемы к определению крена сооружения при расположении отвеса слева (а) и справа (б) от оси
Данная версия фотограмметрического метода характеризуется малой трудоемкостью проведения замеров и получения результатов. Метод применим также для изучения изменения вертикальности высотных зданий и сооружения в режиме мониторинга.

26
Результаты измерений в линейных единицах могут быть получены с использованием метрического масштабирования снимков. В работах [71, 76]
описана процедура обработки снимка с целью установления соответствия между растровыми и метрическими системами координат, что в итоге позволяет определить масштабную цену одного пиксела в метрических единицах для всех сечений трубы по высоте. От точности определения данных величин главным образом и зависит точность определения крена.
Рис. 7. Оптимальное расположение референтной прямой Кроме того, при определении геометрических параметров
строительных объектов башенного типа возникает проблема дисторсии фотоизображения. в вертикальном направлении. На практике оба этих обстоятельства обычно учитываются проведением соответствующей калибровкой фотокамеры, которая является ключевым звеном метода обработки фотоизображений. При этом особую важность приобретает калибровка фотокамеры по вертикальному базису.
27
2.1.1. Калибровка фотокамеры по вертикальному базису с целью измерения расстояния
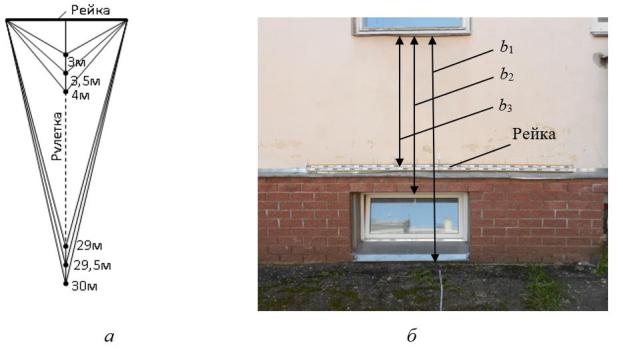
В работе [77] процедура калибровка фотокамеры Nikon COOLPIX S9100 по горизонтальному базису производилась на снимках, которые также пригодны для калибровки по базису вертикальному. Для этого рейка фотографировалась с ряда точек с шагом 0,5 м в интервале от 3 до 30 м для нескольких базисов 0,5; 1,0; 1,5; 2,0 и 3,0 м (Рис.8а).
Рис.8. Схема калибровки с нивелирной рейкой и вертикальные базисы на фотоснимках
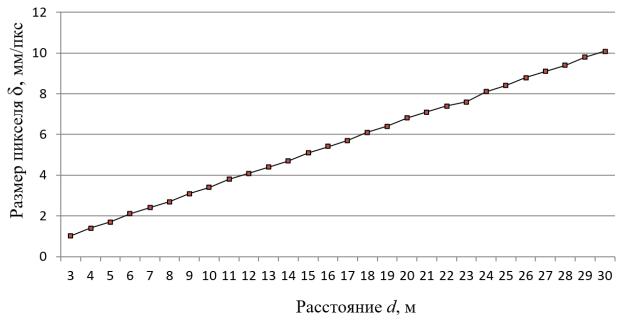
Растровые длины Δ, пкс метрического базиса b, м (будем далее называть эту величину метрической ценой пиксела) определялись редактором Paint, входящим в состав ОС Windows, в результате чего выяснилось, что цена пиксела δ = b/Δ, зависит только от расстояния d и не зависит от величины базисов b. Для всех базисов эта зависимость представлена на Рис.9, и может быть вычислена по формуле
( |
)( |
) |
, |
(2) |
|
( |
) |
||
|
|
|
где δi , δн, δк цена пиксела при расстояниях d i, dн = 3 м и dк = 30 м
соответственно.
28
Калибровки по вертикальному базису сводилась к измерениям величин b1 = 2,58 м, b2 = 1,87 м и b3 = 1,48 м в месте расположения рейки. Эти величины выступали в роли трёх вертикальных базисов (рис. 8б).
В растровом редакторе (в нашем случае Paint) замерялись растровые координаты обоих концов базисов на каждой фотографии с интервалами в 1
метр, начиная с 4 м.
Рис.9. График зависимости цены пиксела от расстояния до горизонтального базиса
Результаты калибровки приведены в Табл.2.
Т а б л и ц а 2
Результаты калибровки фотокамеры Nikon COOLPIX S9100
d, м |
Верхние В и нижние Н |
Разности Δ=Н – В, пкс |
Размер пиксела δ, мм |
|||||||
координаты, пкс |
|
|||||||||
|
|
|
|
|
|
|
|
|||
|
Β1,2,3 |
Н1 |
Н2 |
Н3 |
|
|
|
δ1 |
δ2 |
δ3 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
4 |
245 |
2147 |
1567 |
1333 |
1902 |
1322 |
1088 |
1,4 |
1,4 |
1,4 |
5 |
425 |
1960 |
1495 |
1305 |
1535 |
1070 |
880 |
1,7 |
1,7 |
1,7 |
6 |
545 |
1832 |
1444 |
1285 |
1287 |
899 |
740 |
2,0 |
2,1 |
2,0 |
7 |
653 |
1832 |
1475 |
1325 |
1100 |
822 |
672 |
2,3 |
2,3 |
2,2 |
8 |
793 |
1755 |
1465 |
1345 |
962 |
672 |
552 |
2,7 |
2,8 |
2,7 |
9 |
725 |
1586 |
1327 |
1221 |
861 |
602 |
496 |
3,0 |
3,1 |
3,0 |
10 |
829 |
1603 |
1371 |
1273 |
774 |
542 |
444 |
3,3 |
3,5 |
3,3 |
11 |
877 |
1584 |
1372 |
1289 |
707 |
495 |
412 |
3,6 |
3,8 |
3,6 |
12 |
985 |
1630 |
1437 |
1361 |
645 |
452 |
376 |
4,0 |
4,1 |
3,9 |
13 |
1205 |
1792 |
1613 |
1541 |
587 |
408 |
336 |
4,4 |
4,6 |
4,4 |

29
14 |
1203 |
1754 |
1587 |
1581 |
|
551 |
|
384 |
|
378 |
4,7 |
4,9 |
3,9 |
|||
15 |
1346 |
1857 |
1701 |
1638 |
|
511 |
|
355 |
|
292 |
5,0 |
5,3 |
5,1 |
|||
16 |
1331 |
1809 |
1664 |
1605 |
|
478 |
|
333 |
|
274 |
5,4 |
5,6 |
5,4 |
|||
17 |
1358 |
1807 |
1670 |
1614 |
|
449 |
|
312 |
|
256 |
|
5,7 |
|
6,0 |
|
5,8 |
18 |
1308 |
1736 |
1607 |
1554 |
|
428 |
|
299 |
|
246 |
|
6,0 |
|
6,3 |
|
6,0 |
19 |
1365 |
1772 |
1649 |
1599 |
|
407 |
|
284 |
|
234 |
|
6,3 |
|
6,6 |
|
6,3 |
20 |
1276 |
1661 |
1545 |
1498 |
|
385 |
|
269 |
|
222 |
|
6,7 |
|
7,0 |
|
6,7 |
21 |
1310 |
1677 |
1566 |
1521 |
|
367 |
|
256 |
|
211 |
|
7,0 |
|
7,3 |
|
7,0 |
22 |
1385 |
1734 |
1628 |
1586 |
|
349 |
|
243 |
|
201 |
|
7,4 |
|
7,7 |
|
7,4 |
23 |
1326 |
1658 |
1558 |
1517 |
|
332 |
|
232 |
|
191 |
|
7,8 |
|
8,1 |
|
7,7 |
24 |
1524 |
1844 |
1747 |
1798 |
|
320 |
|
223 |
|
274 |
|
8,1 |
|
8,4 |
|
5,4 |
25 |
1435 |
1741 |
1648 |
1611 |
|
306 |
|
213 |
|
176 |
|
8,4 |
|
8,8 |
|
8,4 |
26 |
1341 |
1636 |
1548 |
1512 |
|
295 |
|
207 |
|
171 |
|
8,7 |
|
9,0 |
|
8,7 |
27 |
1416 |
1701 |
1615 |
1581 |
|
285 |
|
199 |
|
165 |
|
9,1 |
|
9,4 |
|
9,0 |
28 |
1422 |
1696 |
1613 |
1579 |
|
274 |
|
191 |
|
157 |
|
9,4 |
|
9,8 |
|
9,4 |
29 |
1200 |
1467 |
1386 |
1354 |
|
267 |
|
186 |
|
154 |
|
9,7 |
|
10,1 |
|
9,6 |
30 |
1277 |
1534 |
1457 |
1426 |
|
257 |
|
180 |
|
149 |
|
10,0 |
|
10,4 |
|
9,9 |
Рис.10. График зависимости цены пиксела δ от расстояния до базиса
Цена пиксела δ = b/ зависит только от расстояния d и не зависит от величины базиса b. Эта зависимость вычисляется по формуле (2) и
представлена на Рис.10. Видно, что зависимости на Рис.10 и Рис.9
идентичны.

30
На практике можно ограничиться тщательным определением δн и δк, а
цена пиксела δi может быть найден по формуле (2). В частном случае, когда фотокамера расположена в начальной точке линии, то есть dн = 0 м, формула
(2) упрощается и принимает вид
(3)
Величина δi может использоваться, во-первых, для перевода растровых величин в метрическую систему единиц и, во-вторых, для контроля правильности определения di. Для этого, определив i и di, следует по формулам (2) или (3) вычислить фактическую величину δф и сравнить с теоретическим её значением.
Для фотокамеры Nikon COOLPIX S9100 на основании данных табл. 5
построены графики зависимости расстояний d от количества пикселов Δ,
приходящихся на базисы длиной b1, b2, b3. Причём эти графики полностью идентичны построенным по горизонтальному базису. По таким графикам,
вычерченным в крупном масштабе, можно определять графически расстояния dʹ в зависимости от Δʹ для применяемого базиса определённой длины (Рис.11).
Описанная калибровка камеры имеет целью исключение влияния дисторсии объектива, поскольку, во-первых, изображение базиса должно всегда занимать на снимке центральное положение, а цена пиксела,
определённая по изображению базиса, не применяется для других частей снимка. Действительно, если точки i и i+1 (Рис.12) дают правильные расстояния di и di+1 независимо от наличия или отсутствия дисторсии объектива, то и промежуточная точка iʹ также зафиксирует правильное расстояние dʹ. Поэтому для предлагаемой калибровки не требуется использование специальных цифровых фотограмметрических систем типа
ERDAS, ENVI, PHOTOMOD Litе.