

10380
.pdfБ.Б. Лампси, Б.Б. Лампси (мл.), П.А. Хазов, Н.Ю. Трянина
СТАТИКА СООРУЖЕНИЙ
Учебное пособие
Нижний Новгород
2023
- 1 -
Министерство науки и высшего образования Российской Федерации Федеральное государственное бюджетное образовательное учреждение высшего образования
«Нижегородский государственный архитектурно-строительный университет»
Б.Б. Лампси, Б.Б. Лампси (мл.), П.А. Хазов, Н.Ю. Трянина
СТАТИКА СООРУЖЕНИЙ
Утверждено редакционно-издательским советом университета в качестве учебного пособия
Нижний Новгород ННГАСУ
2023
- 2 -
ББК 38.112 С 78
УДК 624.04(075)
Печатается в авторской редакции
Рецензенты:
Г.В. Федотенков – д-р физ.-мат. наук, проф. каф. «Сопротивление материалов, динамика и прочность машин» Московского авиационного института (Национальный исследовательский университет)
Л.И. Кутепова – канд. пед. наук, доц. каф. «Технологий сервиса и технологического образования» НГПУ им. Козьмы Минина
Лампси Б.Б. Статика сооружений [Текст]: учеб. пособие / Б.Б. Лампси, Б.Б. Лампси(мл.), П.А. Хазов, Н.Ю. Трянина; Нижегород. гос. архитект. - строит. ун-т – Н.Новгород:
ННГАСУ, 2023. – 101 с. ISBN 978-5-528-00511-9
В популярной форме авторы знакомят с основными понятиями и методами строительной механики, необходимыми для изучения статически определимых и статически неопределимых плоских стержневых систем. Изложение сопровождается примерами, помогающими овладеть теорией и приобрести минимальные навыки в решении задач.
Для студентов вузов направлений подготовки 07.03.01 «Архитектура» и 08.03.01 «Строительство».
ББК 38.112
ISBN 978-5-528-00511-9 Коллектив авторов, 2023
ННГАСУ, 2023
- 3 -
ПРЕДИСЛОВИЕ
Переход к многоуровневой системе образования проходит в условиях гуманитаризации процесса обучения и создания новых информационновычислительных систем. Это сопровождается значительным сокращением времени, отводимого на изучение механики у студентов традиционных специальностей, и появлением новых специальностей с одним или двухсеместровым курсом по этой дисциплине.
К их числу относится и курс основ строительной механики для студентов направления подготовки 07.03.01 «Архитектура», который состоит из трех разделов:
статика твердого тела,
статика деформируемого тела,
статика сооружений.
Отметим, что студенты строительных специальностей изучают эти разделы механики в соответствующих курсах: теоретической механики, сопротивления материалов и строительной механики. Поэтому нетрудно понять, что успешное овладение основами механики в рамках сокращенной программы представляет непростую задачу как для лектора, так и для студентов. И первым шагом на пути её решения является определение целей этого курса. Для студентов-архитекторов они сформулированы так:
научить анализировать существующие конструктивные решения, понимать работу сооружения в целом и оценивать ту роль, которую играют отдельные элементы ансамбля, устанавливать функциональную связь между воздействиями, внутренними усилиями и формой сооружения;
способствовать осознанному, свободному и целенаправленному решению основной задачи архитектурного проектирования – поиску новых форм и совершенных решений;
ознакомить с основными понятиями и методами строительной механики и помочь формированию рационального и логического мышления.
Достижение намеченных целей требует тщательной подготовки учебной программы и её методического обеспечения.
Настоящее пособие является попыткой содействовать решению этой задачи для третьего раздела курса – статики сооружений. Его содержание не претендует на полноту и отражает точку зрения авторов на то, каким должен быть начальный курс этой дисциплины для архитекторов.
В частности, было принято решение ограничиться изучением плоских стержневых систем, которые в пособии представлены балками, рамами, фермами и арками. Изложена методика построения эпюр и определения перемещений, рассмотрены метод сил и метод перемещений. Даны понятия о расчете статически неопределимых систем методом конечных элементов.
- 4 -
Замечания в конце ряда параграфов предназначены для критически настроенных читателей и могут быть оставлены без внимания при первом чтении.
- 5 -
ГЛАВА 1. ВВЕДЕНИЕ
1.1. Предмет строительной механики и ее задачи
Термин «строительная механика» применяют в широком и узком смысле этого слова.
В широком смысле слова строительная механика – это раздел механики, в котором ее выводы и методы применяют для решения задач проектирования, строительства и эксплуатации сооружений. В этом значении она объединяет такие науки и дисциплины, как:
–теоретическая механика;
–сопротивление материалов;
–теория упругости;
–статика и динамика сооружений;
–металлические и железобетонные конструкции
имногое другое. При этом термин «строительная механика» близок к понятиям «прикладная» или «техническая механика».
В узком смысле слова строительная механика – это, прежде всего, статика сооружений, в дальнейшем именно так мы и будем понимать этот термин.
Напомним, что если предметом теоретической механики является абсолютно твердое тело (или система таких тел), а предметом сопромата – деформируемое тело, то предметом строительной механики является система деформируемых тел.
Основная задача строительной механики – проектирование сооружений, находящихся в определенных условиях, с учетом требований прочности, жесткости, устойчивости, надежности, экономичности, эстетики и других ограничений. Для решения этой задачи нужно построить модель сооружения, выделив основные несущие элементы и определив действующую на них нагрузку. Такая модель в виде совокупности деформируемых тел, соединенных друг с другом и с землей определенными связями, и называется расчетной схемой или системой.
В зависимости от геометрических особенностей элементов системы их делят на три класса: стержневые, тонкостенные и массивы. В общем случае расчетная схема может включать в себя каждый из этих элементов. Мы ограничимся в дальнейшем рассмотрением плоских стержневых систем.
Примечания
1.Помимо основной задачи – проектирования в строительной механике, как и в сопромате, может возникнуть необходимость расчета сооружения, уже находящегося в эксплуатации. Например – при его реконструкции.
2.Решение основной задачи строительной механики сводится, прежде всего, к определению внутренних усилий. Последующий подбор сечений элементов конструкции выполняется методами сопромата либо, в зависимости от вида материала – по теории железобетонных, металлических конструкций и т.д.
-6 -
1.2.Кинематический анализ сооружений
Прежде чем приступить к расчету модели сооружения, необходимо проверить: способна ли она воспринимать приложенную нагрузку, оставаясь в равновесии? При этом расчетная схема рассматривается как совокупность не деформируемых, а абсолютно жестких тел – дисков, и в отдельный класс выделяются системы, элементы которых обладают подвижностью, то есть могут смещаться относительно друг друга или относительно земли. Такое исследование структу-
ры модели называется ее кинематическим анализом.
Поскольку подвижность системы зависит, очевидно, от вида связей, соединяющих ее элементы, вернемся к рассмотрению и уточнению этих понятий – уже встречавшихся в теоретической механике.
1.2.1. Связи и их реакции
Напомним, что под связью понимают тело, ограничивающее свободу перемещения выбранного рассматриваемого тела, а реакцией связи называют силу, с которой связь действует на это тело.
Будем называть связь линейной, если соответствующая ей реакция – сила и моментной, если соответствующая ей реакция – момент.
Для плоских стержневых систем можно ограничиться рассмотрением следующих видов связей.
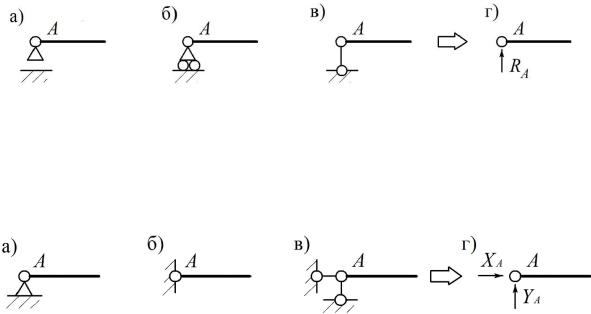
Подвижная опора (рис. 1.1) помимо обозначения по ГОСТ (рис. 1.1, а) может на схемах изображаться так, как показано на рис. 1.1, б и 1.1, в. Она соответствует одной линейной связи, а ее реакция перпендикулярна заштрихованной опорной площадке (рис. 1.1, г).
Рис. 1.1
Неподвижная опора (рис. 1.2) также допускает на схемах изображения, отличные от стандартного – на рис. 1.2 , а. Очевидно, что она эквивалентна двум линейным связям (рис. 1.2, б–г).
Рис. 1.2

- 7 -
Жесткое защемление (рис. 1.3, а) исключает не только перемещения закрепленной таким образом точки конструкции, например – балки, но и ее поворот вокруг этой точки. Оно эквивалентно двум линейным связям и одной моментной (рис. 1.3, б), либо трем линейным связям при 0 (рис. 1.3, в).
Рис. 1.3
Скользящее защемление (рис. 1.4, а–б) в отличие от жесткого не препятствует смещению закрепленной таким образом точки в одном из направлений и эквивалентно линейной и моментной связям (рис. 1.4, в) либо двум линейным при 0 (рис. 1.4, г).
Рис. 1.4
Кратный шарнир, соединяющий N дисков, (рис. 1.5, а) будет эквивалентен (N – 1) простому шарниру (рис. 1.5, б).
Рис. 1.5
Примечания
1.Результаты расчета можно улучшить, если учесть податливость соединений элементов системы.
2.Построение расчетной схемы действующего сооружения может оказаться непростой задачей, соизмеримой по сложности с самим расчетом.
-8 -
1.2.2.Степени свободы и статическая определимость системы
Все системы в механике можно разделить на два класса: неизменяемые системы (НС) и изменяемые системы (ИС).
Определение 1.1. Неизменяемыми, или неподвижными будем называть системы, элементы которых не могут перемещаться относительно друг друга или относительно земли, если они являются абсолютно твердыми, то есть недеформируемыми.
Изменяемыми, или подвижными будем называть системы, элементы которых могут перемещаться относительно друг друга или относительно земли, оставаясь абсолютно твердыми.
НС могут воспринимать любую нагрузку, ИС – только определенные виды нагрузок.
Например, рама на рис. 1.10, а является НС и может воспринимать как горизонтальную, так и вертикальную нагрузку, оставаясь в положении равновесия. А раму на рис. 1.10, б можно загрузить вертикальной нагрузкой, но она не способна воспринимать горизонтальную нагрузку, под действием которой она придет в движение – подобно незакрепленному на рельсах монтажному крану под действием ветра.
Нетрудно догадаться, что в строительстве в основном применяют неизменяемые системы – изменяемые здесь используют сравнительно редко и с большой осторожностью (в отличие от машиностроения, где наоборот интерес представляют изменяемые или подвижные системы).
Все неизменяемые системы делятся на статически определимые (СОС) и статически неопределимые системы (СНС).
Напомним, что СОС – это системы, для которых число неизвестных реакций внешних и внутренних связей не превышает максимально допустимого числа уравнений статики, которые можно составить для их определения.
Если число неизвестных больше максимально допустимого числа уравнений, система называется СНС. При этом разность между числом неизвестных и числом уравнений называется степенью статической неопределимости системы.
Чтобы описать изменяемые системы введем следующее определение.
Определение 1.2. Под степенью свободы системы W будем понимать минимальное число параметров, определяющих ее положение в пространстве.
Очевидно, что для неподвижных систем W = 0, а для подвижных W 1. Для точки на плоскости W = 2, и в качестве параметров можно выбрать ее декартовы координаты. Чтобы однозначно определить положение твердого тела (диска) на этой плоскости нужно задать уже три параметра. Например, координаты фиксированной точки A этого диска xA , yA и угол наклона принадлежащего ему отрезка AB (рис. 1.6). Таким образом, для диска W = 3, а система N дисков на плоскости будет иметь 3N степеней свободы.
Если два свободных диска на плоскости (W = 6) соединить одной линейной связью C1C2, получим систему с пятью степенями свободы (рис. 1.7), поскольку

-9 -
ктрем параметрам для первого диска добавятся углы 1 и 2, определяющие положение стержня C1C2 относительно диска Д1 и диска Д2 относительно точки C2. Аналогично, система двух дисков, соединенных двумя линейными связями (или шарниром) будет иметь 4 степени свободы.
Рис. 1.6
Рис. 1.7
Естественно предположить, что всякое наложение дополнительной связи уменьшает степень свободы системы на единицу, поэтому для произвольной плоской системы ее можно найти по формуле:
W* = 3Д 2Ш СО , |
(1.1) |
где W* – предполагаемая или условная степень свободы системы; Д – число дисков;
Ш – число простых шарниров, соединяющих диски друг с другом;