

9481
.pdf40
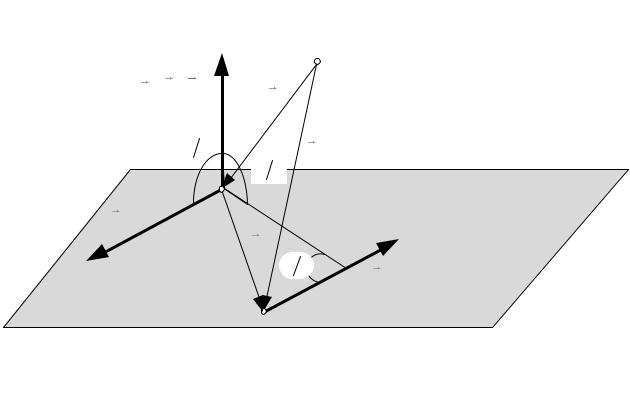
нулю. С помощью приведенных выше формул можно убедиться в том, что величина момента силы относительно центра О в точности равна моменту силы относительно оси z. То есть
для того, чтобы вычислить момент силы относительно оси z, необходимо выполнить следующее:
1.Спроецировать силу на плоскость, перпендикулярную оси.
2.Найти модуль момента, для чего следует умножить модуль проекции F на ее плечо h .
3. Выбрать знак в соответствии с «правилом правого винта».
z
|
|
|
|
|
M z F |
|
|
F |
|
|
|
|
|
|
|
|
|
MO F |
|
|
|
|
|
|
2 |
|
|
|
|
||
F 
 2
2
h |
O |
Рис. 5.3
Получим, что
|
|
|
, |
(5.7) |
() = ± |
||||
|
|
|
|
|
где h − плечо силы F относительно точки О.
ПРИМЕЧАНИЯ
1.Момент силы относительно оси не зависит от положения на ней центра О.
2.Момент силы относительно оси равен нулю в двух случаях : a. сила параллельна оси,

41
b. сила пересекает ось,
то есть когда сила и ось лежат в одной плоскости.
5.4.ГЛАВНЫЕ МОМЕНТЫ СИЛ
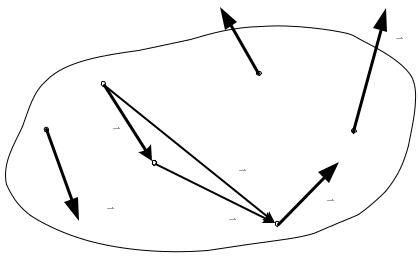
Главным моментом системы сил относительно некоторой точки или оси называется векторная сумма моментов всех сил системы относительно той же точки или оси.
Главный момент относительно центра О выражается формулой:
|
= ∑ |
|
|
|
=1 |
|
|
|
|
|
|
|
F1 |
|
|
|
|
|
F2 |
|
r1 |
|
|
|
r2 |
|
|
O |
|
|
|
rn |
|
|
|
|
ri |
F |
|
|
|
i |
|
|
|
|
( |
|
(5.8) |
|
() = ∑ |
=1 |
× ) |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
MOO* |
MO Fi |
|
MO F2 |
|
MO Fi |
|
i 1 |
|
|
|
|
||||
|
|
|
|
|||
MO F1 |
|
O |
MO Fn |
|
|
|
O |
||
|
|
|
|
Fn
|
|
|
|
|
|
Рис. 5.4 |
Главный момент относительно некоторой оси L выражается формулой: |
||||||
|
|
= ∑ |
|
|
|
(5.9) |
|
=1 |
( ) |
||||
|
|
|
|
|
||
Кроме того, главный момент системы сил относительно оси равен проекции на эту ось главного момента системы сил, определенного относительно некоторой точки этой оси.
5.5.АНАЛИТИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ ГЛАВНОГО МОМЕНТА
Для определения главного момента системы сил относительно центра О необходимо сложить n векторов моментов сил:
|
= ∑ |
|
|
|
|
=1 |
|
() |
|
|
|
|
|
Поскольку равны векторы, стоящие в левой и правой частях последнего равенства, должны быть равны и их проекции на любую ось.
Спроецируем это равенство на оси х, у, z:
42
|
|
|
|
= ∑ |
|
|
|
|
|
|
|
|
||||||
|
|
|
=1 |
( ), |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
= ∑ |
|
|
|
|
|
|
|
(5.10) |
||||||
|
|
|
=1 |
( ), |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
= ∑ |
|
|
|
|
|
|
|
|
||||||
|
|
|
=1 |
( ), |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
где , , − главные моменты сил системы относительно |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
координатных осей, проходящих через центр О, |
|
|||||||||||||||||
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( ), |
( ), ( ) − моменты сил системы относительно тех же осей. |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Далее определим модуль главного момента: |
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
= √( )2 |
+ ( )2 |
+ ( )2 |
(5.11) |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
и его направляющие косинусы: |
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
= |
|
, |
= |
|
, |
= |
|
|
(5.12) |
|||||||
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Рассмотрим частный случай,
В этом случае модуль главного
|
|
= 0 |
|
|
|
|
|
|
|
|
|
или |
√( )2 |
+ ( )2 |
+ ( )2 |
||
|
|
|
|
|
|
когда главный момент равен нулю.
момента будет равен нулю:
= 0
Последнее равенство возможно только при условии, что все слагаемые под корнем равны нулю, то есть когда
|
|
= 0, |
|
∑ |
|
|
|
|
|
|
=1 |
( ) = 0, |
|
||||
|
|
|
|
|
|
|
||
|
|
= 0, |
или |
∑ |
|
|
|
|
|
=1 |
( ) = 0, |
|
|||||
|
|
|
|
|
|
|
||
|
|
= 0, |
|
∑ |
|
|
|
(5.13) |
|
|
=1 |
( ) = 0. |
|||||
|
|
|
|
|
|
|
||
ВЫВОД:
Главный момент системы сил относительно некоторого центра О будет равен нулю в том случае, когда все три суммы моментов исходных сил системы относительно осей, проходящих через центр О, будут равны нулю.
5.6.ЗАВИСИМОСТЬ ГЛАВНОГО МОМЕНТА ОТ ВЫБОРА ТОЧКИ ПРИВЕДЕНИЯ
Пусть задана произвольная система сил (рис. 5.5), главный момент которой относительно центра А равен
43
|
= ∑ |
|
|
|
|
( |
|
|
=1 |
|
() = ∑ |
=1 |
× ). |
||
|
|
|
|
|
|
Выберем новый центр приведения − точку B, относительно которой положение старого центра A определяется радиус-вектором , а положение некоторой i -й силы системы − радиус-вектором ′, который равен
′ = + .
Определим главный момент системы сил относительно нового центра B.
|
= ∑ |
|
|
|
′ |
|
|
(( |
|
|
||
|
=1 |
|
() = ∑ |
=1 |
( |
|
× ) = ∑ |
=1 |
+ ) × ) = |
|||
|
|
|
|
|
|
|
|
|
||||
= ∑=1( × ) + ∑=1( × ).
Первое слагаемое представляет собой векторное произведение радиусвектора на главный вектор системы:
∑=1( × ) = × ∑=1 = × ,
а второе слагаемое равно главному моменту системы относительно старого центра приведения A:
∑ |
|
( |
|
|
=1 |
× ) = |
|||
|
|
|
|
|
В результате получаем, что при перемене центра приведения главный момент меняется по закону
|
|
+ |
|
|
(5.14) |
|
= |
× |
|
||
|
|
|
|
|
+ |
|
|
|
|
|
|
|
|
|
|
|
F1 |
|
|
|
|
|
F2 |
|
|
B |
|
|
|
|
|
|
r0 |
|
|
A ri
Fn |
Fi |
|
ri |
||
|
Рис.5.5

44
ВЫВОДЫ:
1. Если для некоторого центра A главный вектор системы равен нулю ( = 0), то главный момент для всех точек пространства будет одинаков,
поскольку |
|
|
в соответствии с формулой (5.14). |
|
= |
||
|
|
|
|
2. Если для некоторого центра A главный момент и главный вектор
системы равны нулю ( = 0 и = 0), то главный момент будет равен
нулю и относительно любого другого центра.
5.7.МОМЕНТЫ СИЛ, РАСПОЛОЖЕННЫХ В ОДНОЙ ПЛОСКОСТИ
Плоской системой называется система сил, линии действия которых лежат в одной плоскости.
При расположении всех сил системы на одной плоскости вектора моментов сил системы относительно точек плоскости расположены к этой плоскости перпендикулярно. Для указания их направления достаточно одного знака − знака проекции вектора на перпендикулярную к плоскости ось z .
|
|
ось z |
|
|
M B F1 |
F1 |
|
M B F2 |
h1 |
|
|
|
B |
|
|
|
|
|
|
h2 |
|
|
F2 |
Рис. 5.6
По этой причине при рассмотрении плоских систем под моментом силы относительно точки на самом деле понимают скалярную величину: момент силы относительно оси z, проходящей через моментную точку перпендикулярно к плоскости действия сил.
То есть |
|
|
|
|
( ) = |
( ) |
|||
|
|
|
|
|
Величина момента равна произведению силы на плечо:
( ) = ±..

45
Знак момента принимается соответствующим знаку проекции вектора на ось z на ось. Из рисунка видно, что проекция имеет знак «плюс», когда при взгляде на плоскость с конца оси z действие момента происходит против хода часовой стрелки (правило правого винта).
Сложив моменты всех сил системы относительно точки О, получим скалярную величину – главный алгебраический момент плоской системы сил относительно точки О:
|
|
= ∑ |
|
|
|
|
|
|
|
=1 |
( ) = ∑ |
=1 |
( ). |
||||
|
|
|
|
|
|
|||
Тема 6.
ТЕОРИЯ ПАР СИЛ
6.1. СЛОЖЕНИЕ ДВУХ ПАРАЛЛЕЛЬНЫХ СИЛ
До сих пор мы изучили лишь вопрос о сложении сходящихся сил. Перейдем теперь к определению равнодействующей системы
параллельных сил, остановившись сначала на случае двух параллельных сил, приложенных в точках А и В.
Здесь возможны два варианта:
1)силы направлены в одну сторону (рис. 6.1).
l
A C B
l1 |
l |
|
2 |
 F2
F2
F1
R
Рис. 6.1
2) силы направлены в противоположные стороны и не равны по модулю (рис. 6.2). Для определенности пусть F1 F2

46
l2
|
l |
|
l1 |
|
|
|
|
F2 |
|
|
|
B |
|
A |
C |
R
 F1
F1
Рис. 6.2
В обоих случаях величину равнодействующей и положение линии ее действия можно найти с помощью следующей теоремы, которую мы приводим без доказательства:
ТЕОРЕМА
Равнодействующая двух параллельных сил геометрически равна их главному вектору. Линия ее действия расположена в плоскости сил, и проходит параллельно линиям действия сил. Линия действия равнодействующей делит расстояние между точками приложения сил на отрезки, которые обратно пропорциональны модулям сил.
То есть: |
|
|
|
|
= 1 |
+ 2 |
В первом случае модуль равнодействующей равен
= 1 + 2
аво втором случае R F1 F2 , причем равнодействующая
направлена в сторону большей силы.
Линия действия равнодействующей проходит через точку С, которая в первом случае расположена в пределах отрезка АВ, а во втором случае, − за его пределами со стороны большей силы.
Отрезки, определяющие положение точки С, в обоих случаях определяются с помощью пропорций:
l1 l2 l , F2 F1 R
где |
l , |
l |
|
|
|
|
до |
1 |
2 |
− расстояния от линии действия равнодействующей |
|||||
|
|
|
|
|
соответственно, а |
l − расстояние между |
|
линий действия сил 1 |
и 2 |
||||||
47
линиями действия сил 1 и 2 .
СЛЕДСТВИЯ ИЗ ТЕОРЕМЫ:
1.Любую силу можно разложить на две параллельные силы, направленные в одну или в разные стороны. Это можно сделать бесконечным количеством способов.
2.Легко заметить, что модули моментов сил 1и 2 относительно точки С одинаковы, а сумма моментов будет равна нулю:
(1) + (2) = 0.
3.Если система параллельных сил состоит более чем из двух сил, то, последовательно суммируя эти силы, можно найти ее равнодействующую (при условии, что эта равнодействующая существует).
6.2. ПАРА СИЛ, МОМЕНТ ПАРЫ
В предыдущем параграфе, суммируя параллельные противоположно направленные силы, мы вводили существенное условие: F2 F1 .
При F2 F1 , |
|
|
имеет место особый случай. |
2 |
= − 1 |
Главный вектор такой системы по модулю равен нулю.
Если бы ее равнодействующая по модулю тоже была равна нулю, то система находилась бы в равновесии. Однако, эта система в равновесии не находится, что следует из аксиомы 1.
ВЫВОД:
система двух равных по модулю, параллельных и противоположно направленных сил равнодействующей не имеет.
Поэтому свойства таких систем сил должны изучаться отдельно.
Парой сил (или просто парой) называется система из двух равных по модулю, противоположно направленных параллельных сил.
Система сил, образующих пару, не является уравновешенной. Пара сил не имеет равнодействующей, и по этой причине ее нельзя уравновесить одной силой.

48
Пара есть особая мера механического взаимодействия.
Сила и пара сил представляют собой два базовых неупрощаемых элемента статики
m F , F
F
A
B
F
h
Рис. 6.3 |
|
|
|
|
Рассмотрим пару, состоящую из сил |
|
|
(рис. 6.3). |
|
|
и ′ |
|||
Для них выполняется условие |
|
|
и, следовательно, главный |
|
= − ′ |
||||
′ |
= 0 |
|
|
|
вектор этих сил равен нулю: + |
|
|
|
|
Плоскость, проходящая через линии действия сил пары, называется плоскостью действия пары. Расстояние между линиями действия сил пары h называется плечом пары.
Введем теперь понятие момента пары: моментом пары (, ′)
называется вектор, (, ′), направленный перпендикулярно плоскости действия пары в соответствии с правилом «правого винта» (рис. 6.3), и
равный по величине произведению модуля силы на плечо пары:
′ |
) = = ′ |
(6.1) |
(, |
Единица измерения модуля момента пары [m] = Нм.
Очевидно, что модуль момента пары равен площади параллелограмма, построенного на силах пары.
ТЕОРЕМА
Сумма моментов сил, составляющих пару, одинакова относительно любой точки пространства и всегда равняется моменту пары.
ДОКАЗАТЕЛЬСТВО |
|
|
|
|
относительно |
Рассмотрим сумму моментов сил пары и ′ |
||
49
произвольной точки пространства О (рис. 6.4). |
|
|
|
|
||||||||||
Преобразуем ее, введя обозначения |
|
|
|
|
|
|
||||||||
= , |
= , |
= ,, и |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
используя определение момента силы и условие = − ′. |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
′ |
|
|
|
|
|
|
( ) + |
|
( ′) = |
× + |
× |
|
= × − × = |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= ( |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
− ) × = × |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Полученный вектор действительно не зависит от выбора точки О. Видно, что этот вектор направлен так же, как и момент пары, а по
величине равен модулю момента пары :
|
|
|
′ |
) |
| × | = = = (, |
||||
|
|
|
O |
|
m F1, F2 |
r |
|
|
|
|
B |
|
|
|
2 |
|
rA |
|
|
|
2 |
|
|
|
F |
B |
h |
|
|
|
r |
|
|
|
|
|
|
|
|
|
2 |
|
F |
|
|
|
|
|
|
|
A |
|
|
|
|
|
Рис. 6.4 |
||
Таким образом |
|
|
|
|
|
|
|
′ |
) |
|
( ) + |
( ′) = ( , |
||
|
|
|
|
|
СЛЕДСТВИЕ
Если в качестве центра О последовательно выбрать можно получить, что
′ |
|
|
|
|
|
|
( , |
) = |
( ) + |
( ′) = |
( ′), |
||
|
|
|
|
|
|
|
′ |
|
|
|
|
|
|
( , |
) = |
( ) + |
( ′) = |
( ). |
||
|
|
|
|
|
|
|
то есть
(6.2)
точку А или В, то