

9117
.pdf11
Принципиальная схема устройства современного асфальтоукладчика пока-
зана на рис. 2.2.
Рис. 2.2 . Принципиальная схема устройства асфальтоукладчика: 1 – приемный бункер;
2 – |
ходовая часть; 3 – двигатель; 4 – нивелировочный гидроцилиндр; 5 – привод ходовой части; |
6 – |
центральный пульт управления; 7 – толкающие ролики; 8 – боковой щит (скользящая опа- |
лубка); 9 – трамбующий брус; 10 – гидроцилиндр приемного бункера; 11 – тяговый брус (лонжерон); 12- нивелировочная шкала; 13 – приводы питателя и распределительных шнеков; 14 – распределительный шнек; 15 – выглаживающая плита; 16 – привод уплотняющих органов; 17 – блок подключения автоматики нивелирования; 18 – выносной пульт управления; 19 – рабочий настил; 20 – газобалонное оборудования системы обогрева плиты; 21 – цепной питатель
Двигатель является «сердцем» асфальтоукладчика. С его помощью через коробку передач или аксиально-поршневые гидронасосы приводятся в действие ходовая часть и система подачи смеси в шнековую камеру. Дизельные двигатели получили наибольшее распространение по сравнению с другими. Следует отме-
тить, что известны модели укладчиков, на которых установлены трехфазные электродвигатели. По сути, такие двигатели представляют собой передвижные электростанции, отличающиеся высоким коэффициентом полезного действия,
долговечностью, простотой эксплуатации и экологичностью. В связи с фактиче-
ским отсутствием шума в процессе работы их применение наиболее оправдано в
12
местах жилой застройки или природоохранных зонах. Тем не менее пока они не нашли широкого распространения.
Основными элементами гидросистемы асфальтоукладчика являются: гид-
ронасосы, преобразующие энергию крутящего момента от дизельного двигателя в энергию потока жидкости, и гидродвигатели, непосредственно приводящие во вращение ходовую часть, питатели и шнеки укладчика. Дополнительно в систему включены приводы уплотняющих органов и шести гидроцилиндров для подъема рабочего органа, поворота стенок бункера и подъема (опускания) концов тяговых брусьев.
Электрооборудование асфальтоукладчика служит для: запуска двигателя машины и контроля режима его работы; контроля температуры рабочей жидко-
сти в баке гидросистемы, сигнализации и освещения; включения в работу трам-
бующего бруса; управления системами автоматики нивелирования, питателей и шнеков, подъемом стенок бункера и рабочего органа, подогрева плиты.
Центральный пульт управления современных асфальтоукладчиков отлича-
ется хорошим круговым обзором и повышенным удобством работы оператора.
Эргономичное, комфортное и амортизирующее кресло машиниста оборудовано регулирующим устройством, что позволяет ему вместе с пультом перемещаться в поперечном направлении к любому краю машины даже за пределы рабочей пло-
щадки. Пульт при этом скользит по специальным направляющим (рис. 2.3), а
кресло имеет два (три) фиксируемых положения. На главную панель пульта вы-
ведены кнопки управления всеми системами и агрегатами укладчика. Управление движением машины осуществляется с помощью рулевого колеса или джойстика.
Два дополнительных пульта управления автоматикой нивелирования вынесены на внешние края выглаживающей плиты, что позволяет персоналу при необхо-
димости оперативно регулировать толщину и ширину укладываемой полосы.

13
Рис. 2.3. Центральный пульт управления
Ниже приводятся главные конструктивно-технологические особенности шасси и рабочих органов современных асфальтоукладчиков.
2.2. Шасси
Шасси обеспечивает передвижение асфальтоукладчика, прием и распреде-
ление смеси по ширине укладки. При этом все сборочные единицы шасси распо-
лагаются на нижней и верхней рамах, соединенных между собой стойками. Про-
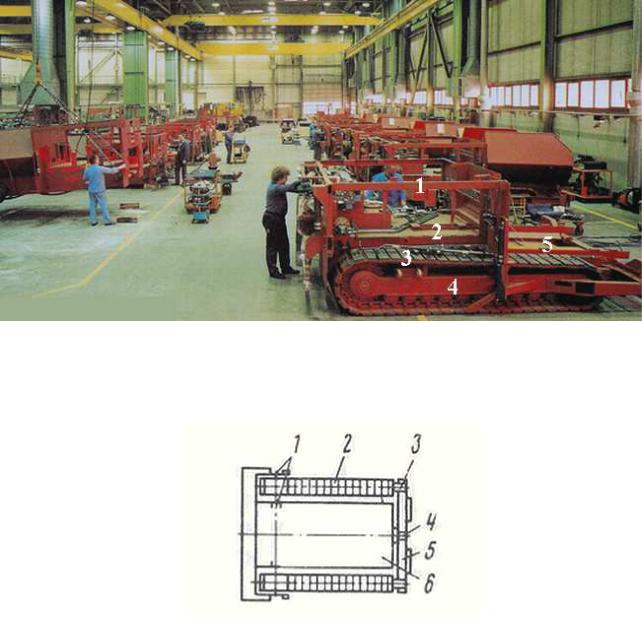
цесс заводской сборки шасси асфальтоукладчика показан на рис. 2.4. На верхней раме (выше туннеля питателей), как правило, расположены двигатель с муфтой сцепления, пульты управления, гидросистема, электрооборудование, сиденье оператора, тент (кабина).
Нижняя рама 6 (рис. 2.5) является основой машины и представляет собой цельносварную металлоконструкцию, шарнирно опирающуюся на две балки хо-
довой части 2 и поперечную балку 5. Соединение рамы с балками осуществляет-
ся посредством опор в шарнирах 1, 3, 4. Подобная конструкция крепления допус-
кает перемещение ходовой части по вертикали при неровностях основания с рав-
номерным восприятием рамой нагрузки от агрегатов машины и асфальтобетон-
ной смеси при её выгрузке в бункер автосамосвалами. На нижней раме размеща-
ются приемный бункер с питателями, распределительные шнеки и трансмиссия на привод хода, шнеков и питателей.
14
Рис. 2.4. Сборка шасси асфальтоукладчика: 1 – несущие элементы верхней рамы; 2 – нижняя рама; 3 – ходовая часть; 4 – балка ходовой части; 5 – скребковый питатель
Рис. 2.5. Схема опирания нижней рамы
Ходовая часть большинства моделей гусеничных асфальтоукладчиков I и II классов является двухопорной, а широкозахватных – четырехопорной с приво-
дом на все гусеницы (рис. 2.6 а). Колесные асфальтоукладчики бывают двух-,
трех- и четырехосные с одной или двумя ведущими осями. Кинематическая схе-
ма ходовой части колесных асфальтоукладчиков приведена на рис. 2.6 б. Комби-
нированные асфальтоукладчики с гусенично-колесным ходом, как правило, лег-
кого типа применяют на работах с частым переходом с одного объекта на другой.

15
1) |
|
|
|
|
|
2) |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3) |
4) |
5) |
7 |
6
Рис. 2.6. Кинематическая схема ходовой части асфальтоукладчиков: 1 – двухопорных;
2 – |
четырехопорных; 3 – двухосных; 4 – трехосных; 5 – четырехосных; 6 – ведущее колесо; |
7 – |
рулевое колесо |

16
На гусеничных асфальтоукладчиках применяются тележки маятникого ти-
па с независимым гидроприводом. Гусеничная лента выполнена из пластиковых или резиновых опорных плит (башмаков) шириной от 189 до 400 мм (рис. 2.7). Маневрирование асфальтоукладчика производится путем изменения скоро-
стей лент. При этом ленты могут двигаться в разных направлениях с различными скоростями. Радиус поворота укладчика задается с пульта управления. Необхо-
димую разность скоростей или синхронность работы лент при движении по пря-
мой контролирует электронный регулятор. Управление движением колесных ас-
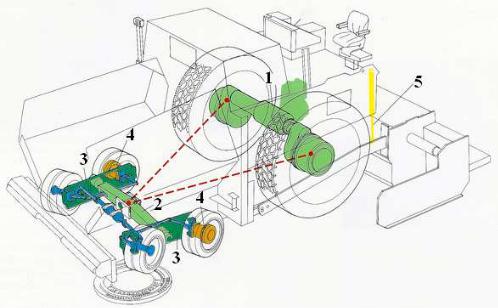
фальтоукладчиков осуществляется с помощью передних поворотных колес (рис. 2.8). Наличие балансирных рычагов, качающихся в продольном направлении и подвешенных к балансирной балке, качающейся в поперечном направлении, поз-
воляют оставаться рулевым колесам всегда в полном контакте с основанием, да-
же при наличии на нем неровностей. Сцепление ведущих колес с основанием обеспечивается за счет большой опорной площади шин с глубоким протектором и дополнительным оборудованием заднего моста блокируемым дифференциа-
лом. Система автоматически позволяет плавно регулировать разгон до заданной скорости, сохраняя её затем постоянной при различных нагрузках.
Рис. 2.7. Ходовая часть гусеничных асфальтоукладчиков: 1 - гусеничная лента; 2 – опорный башмак
17
Рис. 2.8. Схема рулевого управления колесного асфальтоукладчика: 1 – дифференциал ведущего моста; 2 – поперечная балансирная балка; 3 – качающийся балансирный рычаг; 4 – рулевой механизм; 5 - гидроподъемник
Приемный бункер служит для выгрузки смеси из автосамосвала. Емкость приемного бункера в зависимости от модификации асфальтоукладчика может меняться от 1,5 до 17,5 тонн. Бункер образован (рис. 2.9) левой и правой бокови-
нами, складывающимися вовнутрь при помощи гидроцилиндров, задней стенки,
функцию которой выполняет передняя часть нижней рамы и дном из листовой стали. По листам, закрепленным на раме, смесь перемещается из передней в зад-
нюю часть машины. Поворотные боковины позволяют увеличить вместимость бункера без увеличения ширины питателей. При этом смесь, находящаяся у краев бункера, скатывается к центру под действием собственного веса при внутреннем наклоне боковин. В передней части бункера поверх боковин установлен допол-
нительный щит, который также поворачивается (складывается) внутрь за счет штанги, шарнирно закрепленной на внешней грани боковин. На некоторых мо-
дификациях асфальтоукладчиков вместо переднего щита используют открылки,
установленные на боковинах. Положение автосамосвала относительно укладчика контролируется с помощью качающихся передних толкающих роликов. Приме-
няя специальные зацепы, можно с помощью гидравлики прочно захватывать обо-
да колес самосвала и удерживать его во время движения укладчика.

18
Рис. 2.9. Приемный бункер асфальтоукладчика: 1 – боковины; 2 – задняя стенка; 3 – дополнительный передний щит; 4 – толкающие ролики; 5 – гидроцилиндр; 6 – скребковый конвейерпитатель; 7 – средняя направляющая; 8 – левый (правый) защитный кожух; 9 - штанга
На дне бункера расположены цепные скребковые конвейеры-питатели,
разделенные между собой средней направляющей. Направляющая, как и защит-
ный кожух, предохраняют приводную часть питателя от попадания на неё смеси.
Оба конвейера работают раздельно (независимо) по принципу погруженных скребков. При работе скребки скользят по поверхности стальных листов, пере-
мещая смесь из бункера в шнековую камеру. Конвейерная лента состоит из двух
(одной) тяговых цепей. На отдельных моделях асфальтоукладчиков цепная пере-
дача приводит в действие пластинчатый конвейер из нихарда. Производитель-
ность питателя может регулироваться заслонками шиберного типа (рис. 2.10)
вручную либо автоматически с помощью датчиков лопастного типа, установлен-
ных в задней части конвейера.
На современных асфальтоукладчиках каждый питатель (рис. 2.11), как впрочем, и распределительные шнеки, оснащены отдельными гидростатическими

19
приводами, что позволяет подавать смесь в соответствии с требуемой производи-
тельностью укладки. Это возможно даже когда с одной стороны необходимо уложить больше материала из-за разной толщины слоя или асимметричного уширения рабочего органа. Каждый привод включает гидронасос, гидродвига-
тель, понижающий редуктор и цепную передачу, объединенные в общий замкну-
тый контур. Работа отдельных агрегатов изменяется пропорционально отклоне-
нию запаса (уровня) смеси в шнековой камере от заданного значения. При этом фактическое количество смеси при подаче питателями (шнеками) определяется расположенными над ними щупами - лопастными датчиками контактного типа.
Любое изменение их положения потенциометрами преобразуется в импульсы управления работой питателей и (или) шнеков.
Установка в режим работы «Автомат» или «Ручное» питателей и шнеков производится с помощью соответствующих переключателей для левых и правых органов машины, расположенных на пульте управления. В автоматическом ре-
жиме работа ведется по сигналам датчиков уровня материалов 7 (рис. 2.11), уста-
новленных по концам обоих шнеков. При наращивании уширителей шнеков дат-
чики могут перемещаться на трубчатых опорах. Датчики работают в двухкон-
тактном режиме. Их конструкция позволяет регулировать положение щупа и его поворота вокруг оси в зависимости от толщины укладываемого слоя.
Рис. 2.10. Регулировка подачи смеси с помощью шиберных заслонок: 1 – шиберные заслонки

20
Рис. 2.11. Туннель скребкового питателя (вид со стороны шнековой камеры): 1 - защитный кожух; 2 – скребок; 3 - лента питателя; 4 - привод питателя; 5, 7 – лопастные датчики уровня смеси на ленте питателя и в шнековой камере соответственно; 6 – средняя направляюшая; 8 - привод шнеков; 9 – кронштейн крепления шнека; 10 – рама асфальтоукладчика; 11 – гидро-
цилиндр подъема шнеков; 12 – распределительный шнек; 13 – передний щит шнековой камеры
Правильная настройка датчиков предупреждает переполнение шнековой камеры, предохраняя износ шнеков, и исключает образование раковин в покры-
тии из-за недостатка материала перед выглаживающей плитой. При пустой шне-
ковой камере щуп под собственным весом находится в крайнем нижнем положе-
нии, замыкая контакты включения гидроприводов питателей и шнеков (рис. 2.12). При заполнении шнековой камеры, когда смесь переместит щуп в крайнее верхнее положение, управляющая система обесточивается, останавливая работу гидропривода того или иного контура (или обоих сразу). Нормальной считается работа, при которой щуп занимает промежуточное положение между крайними заданными точками.