

8779
.pdf50
( R R ) = ( R R ) =
m F , F m P , P Fd.
1 2 1 2
Второе утверждение доказано.
3-е утверждение (Теорема о переносе пары в параллельную плоскость)
Пару можно переносить на параллельную плоскость действия.
Доказательство
∙ |
R R |
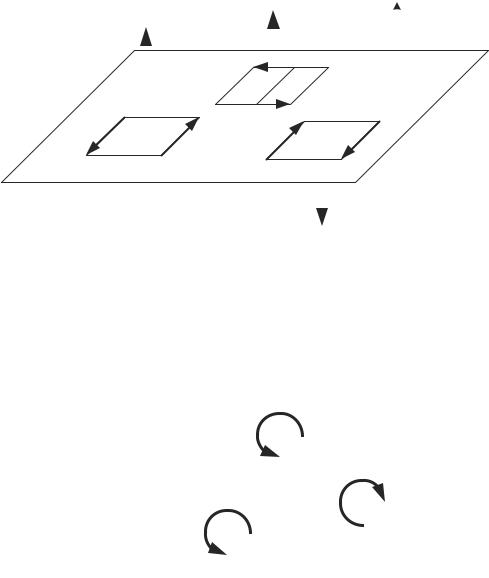
Пусть к твердому телу приложена пара сил (F1, F2 ) с плечом AB (рис.6.8), кото- |
|
|
рые лежат в плоскости Π1 . |
∙Параллельно плоскости Π1 проведем плоскость Π 2 и проведем на ней отрезок A1B1 , который равен и параллелен отрезку AB .
∙ В точках A1 |
и B1 приложим две уравновешенные системы сил,: |
|
|||||||||||
R |
R′ |
, так как |
|
′ |
|
и |
|
R |
R′ |
) ≡ 0 |
|
′ |
, |
(P , P ) ≡ 0 |
P = −P |
|
|
(P , P |
, так как P = −P |
||||||||
1 |
1 |
|
1 |
1 |
|
|
|
2 |
2 |
|
2 |
2 |
|
силы которых равны по модулю |
|
|
|
|
|
|
|
|
|||||
|
|
|
P = P = P′ = P′ |
= F = F = F . |
|
|
|
||||||
|
|
|
1 |
2 |
1 |
2 |
1 |
2 |
|
|
|
|
|
∙Сложим параллельные силы и направленные в одну сторону силы, приложенные в противоположных углах параллелограмма:
|
′ |
= R , |
|
′ |
′ |
F + P |
F + P |
= R . |
|||
1 |
2 |
|
2 |
1 |
|
Результирующие силы R |
и R′ равны по модулю, противоположно направлены и |
||||
приложены в одной точке, совпадающей с точкой пересечения диагоналей паралле-
|
|
|
R |
R |
лограмма, поэтому они образуют уравновешенную систему ( R, R′) ≡ 0 , которую |
||||
можно исключить. |
|
|
|
|
|
|
|
R |
|
|
|
|
R′ |
|
R |
R |
|
|
R |
F2 |
P |
|
|
P |
|
2 |
|
2 |
|
|
R |
|
|
|
B |
P′ |
|
B |
|
1 |
|
|
||
|
B1 |
C |
B1 |
|
|
R |
′ |
|
|
A |
P |
|
A1 |
|
A1 |
A |
|
||
|
2 |
|
|
|
|
R |
|
|
R |
R |
P |
|
|
P |
F1 |
1 |
|
|
1 |
|
|
R |
|
|
|
|
|
|
|
|
|
|
R |
|
Рис. 6.8. |
|
|
|
|

51
∙ |
R R |
Оставшиеся две силы образуют пару сил (P1, P2 ) , которая эквивалентна заданной |
|
|
R R |
|
паре (F1, F2 ) и имеет тот же момент, но расположена в параллельной плоскости. |
Все три утверждения доказаны:
Доказанные утверждения, позволяют преобразовывать и переносить пару, сохраняя при этом вектор ее момента неизменным.
ВЫВОДЫ:
∙Ни величина силы, ни размерплеча, ни направление сил пары значения не имеют. Существенной характеристикой пары является только ее момент.
∙Момент пары — вектор свободный. Он не связан с какой-либо точкой пространства или линией действия и может быть перенесен в любую точку тела.
6.5.ГЛАВНЫЙ ВЕКТОР И ГЛАВНЫЙ МОМЕНТ СИСТЕМЫ ПАР
Рассмотри систему n пар (F, F′), где i = 1, 2,... n, , произвольно расположенных в
пространстве (рис. 6.5).
|
|
R |
R |
Момент i-ой пары m (Fi |
, Fi′) для краткости будем обозначать mi . |
||
R |
R |
, Fi′) . |
|
То естьmi |
= m (Fi |
|
|
Определим главный вектор системы пар, для чего просуммируем все силы, вхо-
дящие в систему:
|
∑( |
i |
i ) |
|
R |
n |
R |
R |
′ . |
R = |
|
F |
+ F |
|
i=1
Поскольку силы пары равны и противоположно направлены, то векторная сумма сил пары будет равна нулю, посколькуFi = −Fi′. По этой причине результатом сум-
мирования сил всех пар будет ноль:
R = 0.
Определим главный момент системы пар относительно некоторого центраО, для чего просуммируем моменты всех сил, входящих в систему:
R |
n R R R R |
MO |
= ∑(MO (Fi ) + MO (Fi )). |
i=1
Всоответствии с теоремой из §6.3, сумма моментов сил пары относительно

52
любой точки пространства равна моменту пары. Отсюда следует, что
R
MO
= ∑n R ( m
i=1
R
Fi
R′)= ∑n R
, Fi mi .
i=1
R m1
(6.3)
R |
R R R |
′) |
mi |
= m (Fi , Fi |
R
Fi
i − я пара
FRi′
R mn
Рис. 6.5
Таким образом, мы убедились, что справедлива
ТЕОРЕМА О СЛОЖЕНИИ ПАР
Система пар сил эквивалентна одной результирующей паре, момент которой равен векторной сумме моментов этих пар.
Следствия из теоремы:
∙Моменты двух пар складываются аналогично тому, как складываются силы: по правилу параллелограмма или с помощью треугольника моментов.
∙Для нескольких пар сложение выполняется по правилу многоугольника моментов, которое аналогично правилу силового многоугольника. Результирующая пара будет замыкающей стороной многоугольника моментов.
∙Поскольку моменты пар не зависят от выбора точки приведения, то и главный момент, как их сумма, в данном случае от выбора центра не зависит.
6.6. УСЛОВИЕ УРАВНОВЕШЕННОСТИ СИСТЕМЫ ПАР
Пара сил не является уравновешенной системой сил. Поэтому для уравнове-
53
шенности системы пар требуется, чтобы момент результирующей пары был равен нулю. То есть,
для того чтобы система пар была уравновешенной, необходимо и достаточно, чтобы выполнялись следующие условия:
1. В векторной форме:
векторная сумма моментов всех пар должна быть равна нулю:
n
∑ R = (6.4) mi 0
i=1
2.В геометрической форме:
многоугольник моментов пар должен быть замкнут.
3.В аналитической форме:
сумма проекций моментов пар на каждую из координатных осей должна быть равна нулю:
∑mix |
= 0, |
|
|
= 0, |
(6.5) |
∑miy |
||
∑miz |
= 0. |
|
6.7. МОМЕНТЫ ПАР, РАСПОЛОЖЕННЫХ В ОДНОЙ ПЛОСКОСТИ
Если пары расположены в одной плоскости (рис.6.6), то их вектор-моменты направлены перпендикулярно к этой плоскости.
В этом случае моменты пар отличаются только модулем и знаком проекции на ось z, перпендикулярную к плоскости действия пар, и могут рассматриваться как скалярные величины.
Проекции эти положительны, если при взгляде на плоскость со стороны положительного направления оси, мы видим пары действующими против часовой стрелки (рис. 6.6).
Для плоской системы сил введем понятие алгебраического момента пары: ал-
гебраическим моментом пары называется взятое со знаком «плюс» или «минус» произведение одной из сил пары на плечо пары:
mi = m (Fi , Fi′)= ±Fd .
54
|
|
|
|
|
|
|
|
|
|
R |
|
|
ось z |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
R |
|
|
|
|
|
|
m2 |
|
|
|
|||
|
|
m1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F2 |
|
|
|
|
h2 F ′ |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
R |
|
h1 R |
|
|
|
|
|
2 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
R |
|
h3 |
|
|
|
|||||||
F |
|
|
|
|
|
|
|
||||||||
|
′ |
F3 |
|
R |
′ |
||||||||||
1 |
|
|
F |
|
|
|
|
F |
|||||||
|
|
|
|
|
|
|
|||||||||
|
1 |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m1 = +F1h1 |
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
m2 = +F2h2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m3 = −F3h3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
m3 |
|
|
|
При решении плоских задач пара изображается скобкой, стрелка которой указывает направление вращения пары, поскольку направление сил пары, ее плечо и место расположения не существенны, − они могут меняться произвольно, если при этом не меняется момент пары.
|
m2 |
m1 = +F1h1 |
|
|
|
|
|
m2 = +F2h2 |
|
m3 |
|
m1 |
|
m3 = −F3h3 |
|
|
|
Рис. 6.6
Сложение пар сил, лежащих в одной плоскости или в параллельных плоскостях, является частным случаем сложения пар: в этом случае векторное сложение можно заменить алгебраическим сложением:
M = m1 + m2 + m3 = F1h1 + F2h2 − F3h3

55
m1 m3
M
m2
Рис.6.7
Если пары лежат в одной плоскости, то путем суммирования их можно заменить одной эквивалентной парой, момент которой назовем результирующим алгебраическим моментом системы пар.Результирующийалгебраический момент системы пар, расположенных в одной плоскости, равен сумме алгебраических моментов составляющих пар:
n |
|
MO = ∑mi . |
(6.6) |
i=1
Система пар находится в равновесии только в том случае, когда результирующий момент равен нулю.Таким образом,
для равновесия пар сил, действующих на твердое тело в одной плоскости, необходимо и достаточно, чтобы сумма алгебраических моментов этих пар была равна нулю, то есть
n |
|
∑mi = 0. |
(6.7) |
i=1
ема 7.
ПРОИЗВОЛЬНАЯ ПРОСТРАНСТВЕННАЯ СИСТЕМА СИЛ
7.1. ЛЕММА ПУАНСО О ПАРАЛЛЕЛЬНОМ ПЕРЕНОСЕ СИЛЫ
Рассмотрим теперь самый общий случай — систему, состоящую из любого количества сил, как угодно расположенных в пространстве.
Для краткости будем называть такую систему произвольной пространствен-
ной системой сил.
Прежде чем перейти к ее преобразованию, приведем вспомогательную теорему (лемму Пуансо) о параллельном переносе силы.
56
Луи Пуансо (LouisPoinsot, 1777-1859) — французский математик и механик, автор геометрической статики (1803). Ввел в механику понятия момента силы, пары сил, разработал теорию пар и метод приведения системы сил. Многое сделал в кинематике и динамике.
Пусть дана сила F , приложенная в точке A (рис. 7.1а).
Приложим к точке B две силы: F ′ и F ′′ , равные по величине и противопо-
ложно направленные ( F ′′ = −F ′), что допускается в соответствии с аксиомой 2, по-
R′ R′′ |
)≡ 0 . |
скольку (F , F |
|
|
R R |
|
MO (F ) Π |
R
F′′
R |
|
R |
|
′ |
F′ |
||
F |
|||
r |
|
|
|
R |
|
|
|
F |
|
|
Рис. 7.1
R
Пусть по модулю они будут равны силе F и параллельны ей (рис. 7.1).
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
Полученная система сил |
представляет собой силу F ′, геометрически равную |
|||||||||||
|
R |
|
|
|
|
|
|
|
|
R |
R |
||
силе F , |
приложенную в центре приведения B и пару сил F |
′′ и F , момент которой |
|||||||||||
|
R |
R R |
R |
|
R |
|
|
|
|
|
|
|
|
|
|
×F . |
|
|
|
|
|
|
|
|
|||
равен m |
(F, F′′)= r |
|
|
|
|
|
|
|
|
||||
|
Поскольку выполненные преобразования эквивалентны, то |
||||||||||||
R |
R |
R R |
|
R |
R |
R R |
′′)). |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
||||
(F )≡ (F, (F′, F′′))≡ (F′, m (F, F |
|
|
|
|
|||||||||
|
Добавляемая пара сил называется присоединенной парой. |
||||||||||||
|
|
|
|
|
к центру B , |
||||||||
Момент |
присоединенной пары, добавляемой при приведении силы F |
||||||||||||
|
|
относительно выбранного центра B : |
|||||||||||
равен моменту данной силы F |
|||||||||||||
|
|
|
|
R |
R |
R |
R |
R |
|
|
|
||
|
|
|
|
m(F, F′′)= MB (F ). |
|
|
|
||||||
Доказана ЛЕММА ПУАНСО:
57
силуF можно переносить на параллельную линию действия, добавляя при
этом присоединенную пару, момент которой равен моменту силы относительно новой точки приложения силы.
Операция переноса силы в заданную точку называется приведением силы к заданному центру.
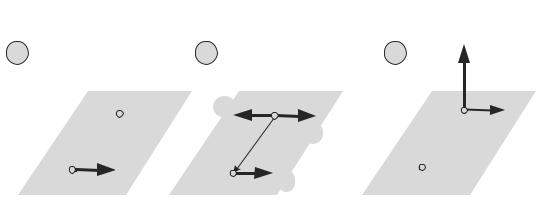
7.2.ПРИВЕДЕНИЕ СИСТЕМЫСИЛ МЕТОДОМ ПУАНСО
Если рассматривается система сил, то все силы (пользуясь леммой Пуансо) можно привести к некоторому центру. В результате этого исходная система сил упростится.
|
|
R |
|
|
|
|
F1 |
|
|
|
|
|
R |
|
|
|
|
F2 |
|
|
|
A1 |
|
R |
|
R |
|
|
F2 |
|
|
|
|
|
R |
r1 |
A2 |
R |
R |
|
Fn |
|||
F |
|
|
F1 |
|
|
|
|
||
n |
|
R |
|
|
|
|
r2 |
|
|
An |
O |
R |
|
|
rn |
O |
|
|
|
R |
|
|
m1 |
|
R |
R |
|
mn |
||
m |
||
|
2 |
Рис. 7.2
ОСНОВНАЯ ТЕОРЕМА СТАТИКИ (теорема Пуансо)
Любая система сил при приведении к произвольному центру заменяется одной силой и одной парой. При этом сила равна главному вектору системы сил и приложена в центре приведения, а пара имеет момент, равный главному моменту системы сил относительно центра приведения.
Доказательство
58
Рассмотрим произвольную систему сил F1, F2 ,..., Fn , |
(рис. 7.2., а). |
|
||
Следуя методу Пуансо, каждую силу системы Fi приведем к центру О, добав- |
||||
|
|
|
R |
R |
ляя (рис. 7.2, б) при каждом переносе присоединенную пару с моментом mi |
=ri ×Fi , |
|||
который равен моменту данной силы относительно точки О: |
|
|||
R |
R |
R |
|
|
mi |
= MO (Fi ) |
|
|
|
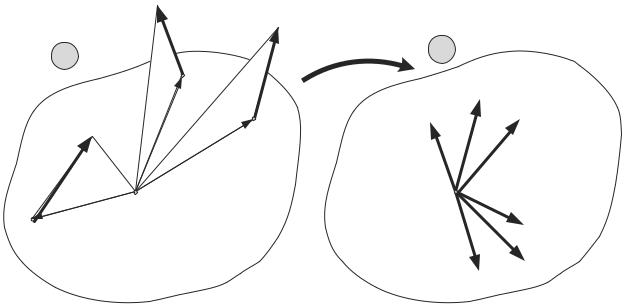
Образовавшуюся в точке О систему сходящихся сил (рис. 7.3) заменим одной |
||||
силой, которая равна главному вектору системы: |
|
|
||
R |
n |
R |
|
|
R |
= ∑Fi |
(7.1) |
|
|
i=1
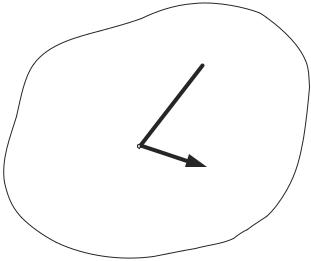
R
 R
R
O |
R |
|
M0 |
||
|
Рис. 7.3
Систему присоединенных пар заменим одной парой (рис. 7.3), момент кото-
R
рой равен сумме моментов присоединенных пар mi и следовательно, равен главному моменту системы сил:
n
∑ R
mi
i=1
n R R R |
|
= ∑MO (Fi )= MO . |
(7.2) |
i=1
Теорема доказана.
СЛЕДСТВИЕ:
две системы сил, имеющие одинаковые главные векторы и одинаковые главные моменты относительно одного и того же центра, эквивалентны друг другу.
59
7.3.УСЛОВИЯ УРАВНОВЕШЕННОСТИ ПРОИЗВОЛЬНОЙ ПРОСТРАНСТВЕННОЙ СИСТЕМЫ СИЛ
Сформулируем теперь условия, при которых произвольная пространственная система сил будет уравновешенной.
Система сил в общем случае заменяется одной силой и одной парой, но сила и пара не могут уравновесить друг друга.
Следовательно, для уравновешенности системы сил требуется, чтобы и сила, и момент пары были нулевыми.
Отсюда получаются приведенные ниже в трех формах условия уравновешенности произвольной пространственной системы сил.
Для того чтобы произвольная пространственная система сил была уравновешенной, необходимо и достаточно, чтобы выполнялись следующие условия:
1.В векторной форме:
главный вектор системы сил и главный момент системы сил относи-
тельно некоторой точки должны быть равны нулю:
|
|
|
|
|
n R |
= 0, |
R |
|
|
|
|
∑ Fi |
|
R |
= 0, |
|
|
|
|
|
|
или |
|
i=1 |
(7.3) |
||
R |
= 0, |
|
|
|
||
MO |
|
|
n |
R |
R |
|
|
|
|
∑MO (Fi ) = 0. |
|||
|
|
|
i=1 |
|
|
|
2.В геометрической форме:
силовой многоугольник и многоугольник моментов должны быть замкнуты.
3.В аналитической форме:
суммы проекций сил на каждую из координатных осей и суммы моментов сил относительно каждой из координатных осей должны быть равны нулю: