7152
.pdfопалубочных работ, как монтаж опалубки перекрытий и выверка положения опалубочных щитов.
С целью совершенствования технологии устройства перекрытий при возведении здания с помощью ППО был выполнен многокритериальный анализ существующих методик, в результате которого было определено, что наиболее перспективный вариант, с точки зрения увеличения производительности и сокращения сроков строительства, поярусное бетонирование стен и перекрытий в сочетании с комплексной механизацией и автоматизацией технологического процесса. Данный вариант обеспечивает значительное снижение трудоемкости, что, согласно выражению (5), увеличивает степень технологической гибкости опалубочной системы.
Разработан технологический комплекс для устройства междуэтажных перекрытий монолитного здания, сооружаемого в ППО без применения

башенного крана (рис. 2). Комплекс работает следующим образом: монтажные элементы перекрытий (несъемная опалубка) помещаются в кассету. Кассета доставляется подъемником на отметку, на которой происходит устройство перекрытий, и поступает в накопитель, предназначенный для перемещения кассеты от накопителя к требуемому пролету; далее тележка-манипулятор поочередно производит захват каждого элемента перекрытия и перемещает его на заданную позицию вдоль пролета. Процесс повторяется до окончания монтажа перекрытий на данном пролете, после чего тележка-манипулятор перемещается на накопитель, который доставляет её и кассету с элементами перекрытия на еле-
13
дующий пролет. Вышеописанный процесс повторяется до конца монтажа всех элементов перекрытия на этаже.
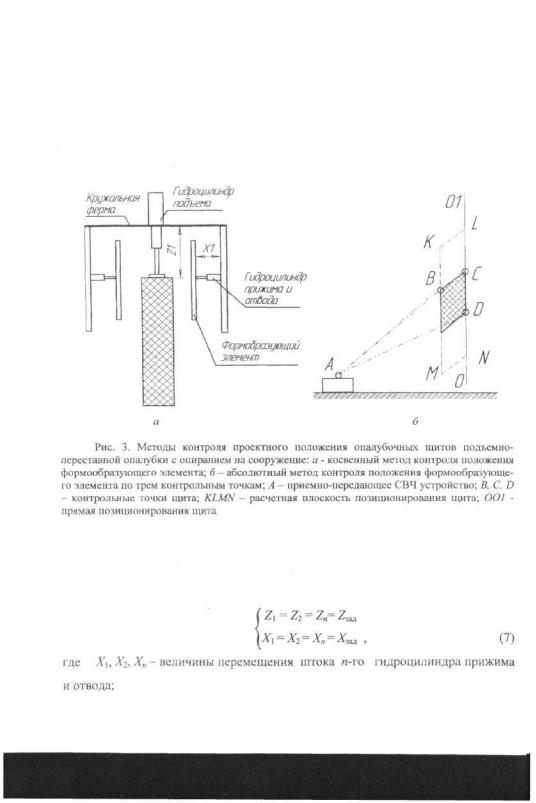
Для снижения трудоемкости работ, связанных с выверкой опалубочных щитов, разработаны автоматизированные методы контроля их проектного положения (рис. 3).
В случае если принять, что деформации опалубочного комплекса исключены, то положение опалубочного щита можно контролировать косвенным методом согласно следующему уравнению:

14
Хзад — требуемое перемещение штоков гидроцилиндров прижима и отвода;
Z1, Z2 ,Zn— величины перемещения штока n - го гидроцилиндра подъема; Zзaд - требуемое перемещение штоков гидроцилиндров подъема. Абсолютный метод учитывает возможные деформации узлов комплекса и
заключается в измерении координат непосредственно углов опалубочного щита с помощью СВЧ устройств. Контроль за положением щита осуществляется в три этапа: определение положения плоскости опалубочного щита, определение отклонения щита в плоскости позиционирования по прямой позиционирования и определение высоты установки щита.
Третья глава посвящена разработке методов и средств автоматизации опалубочных работ с целью снижения их трудоемкости и, как следствие, увеличению степени технологической гибкости опалубочной системы.
Управление процессом перемещения НПО на последующий ярус бетонирования заключается в обеспечении синхронной работы всех подъемных домкратных механизмов вертикального перемещения таким образом, чтобы значения величин подъема для всех точек опалубки, лежащих в одной горизонтальной плоскости, было одинаково на протяжении всего цикла подъема, а также в обеспечении остановки комплекса при достижении им заданной высоты.
Система автоматизации подъема на базе программируемого логического контроллера PCD1 (рис. 4) для обеспечения как точности позиционирования, так и синхронности подъема содержит два контура обратной связи с независимыми регуляторами - контур с обратной связью по скорости и контур с обратной связью по перемещению. Система функционирует следующим образом. На первом этапе активен регулятор контура с обратной связью по скорости, при этом регулятор контура с обратной связью по перемещению отключен, однако сигнал о величине перемещения поступает на блок сравнения, который активирует и деактивирует регуляторы скорости и перемещения в зависимости от величины перемещения комплекса. При работе контура с обратной связью по
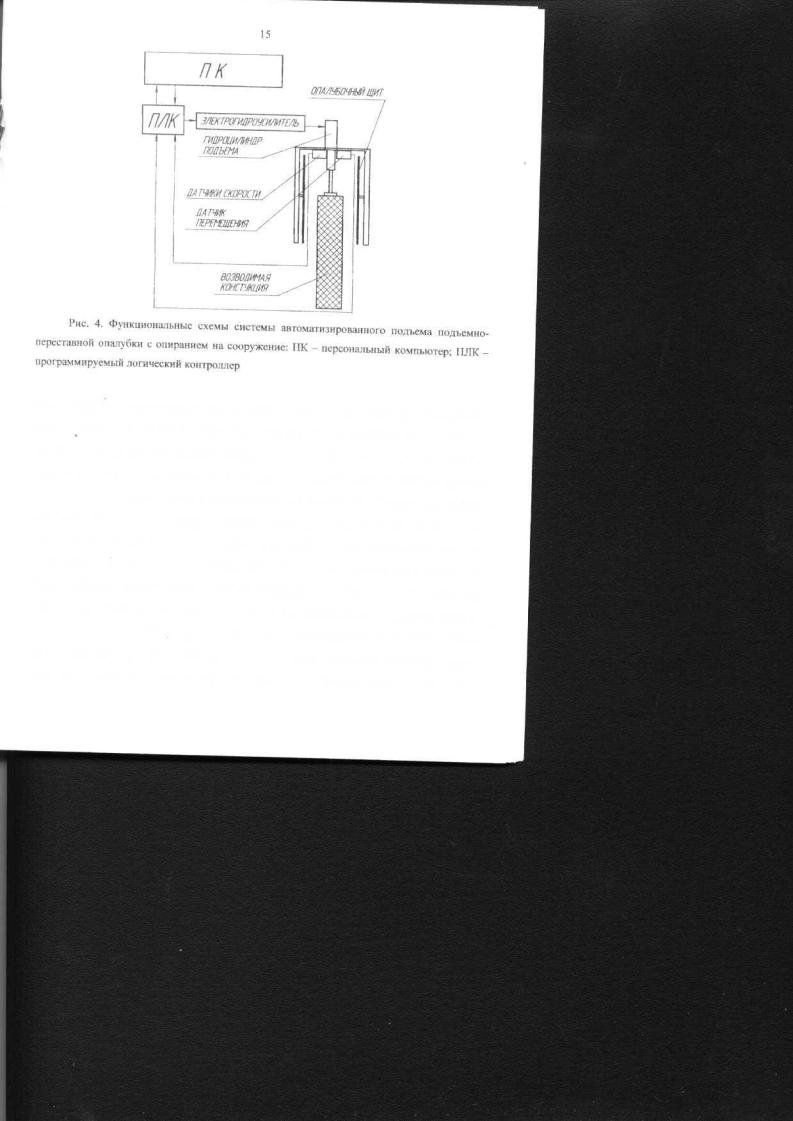
перемещению обеспечивается перемещение штока гидроцилиндра домкратного механизма с постоянной скоростью за счет того, что сигнал с датчика скорости перемещения штока гидроцилиндра поступает на блок последовательного интерфейса блока управления, в зависимости от разницы величины заданной скорости перемещения Vзад и величины выходного сигнала Vфакт датчика скорости, блок управления формирует сигнал задания на перемещение штока. Сигнал задания с блока последовательного интерфейса блока управления поступает на электрогидроусилитель домкратного механизма, пропорционально данному сигналу формируется разность давлений в рабочих полостях гидроцилиндра, в результате чего осуществляется перемещение штока гидроцилиндра с заданной скоростью. На втором этапе при приближении штока к зоне позиционирования, что определяется величиной выходного сигнала датчика перемещения, блок сравнения отключает регулятор скорости и включает регулятор пере-
16
мещения, что обеспечивает точный останов ППО на требуемой высоте. Работа контура с обратной связью по перемещению аналогична работе контуру с обратной связью по скорости, за исключением того, что контролируемой величиной является величина перемещения штока, значение которой поступает с датчика перемещения.
Разработана система управления автоматизированной технологией устройства перекрытий монолитного здания, сооружаемого в ППО, содержащая подсистемы управления подъемником, накопителем, тележкой-манипулятором и захватом.
Подсистема управления подъемником контролирует процесс перемещения кассеты с несъемной опалубкой от места загрузки до накопителя. Подсистема управления накопителем контролирует процесс перемещения накопителя к заданному пролету. Подсистема управления перемещением тележкиманипулятора контролирует процесс перемещения тележки вдоль пролета к месту установки монтажного элемента. Каждая из трех подсистем управления имеет контур с обратной связью по перемещению, который обеспечивает доставку кассеты или элемента перекрытия в заданную точку. Также подсистема управления тележкой-манипулятором для контроля таких операций, как прижим, разжим захвата и подъем и опускание захвата, имеет четыре дискретных датчика положения захвата (датчик прижима, датчик разжима, датчик верхнего положения захвата, датчик нижнего положения захвата).
Разработана автоматизированная система прижима и отвода опалубочных щитов, работающая следующим образом. При поступлении команды о начале прижима опалубочных щитов активируется регулятор контура с обратной связью по перемещению, контроллер сообщает сигнал задания электрогидроусилителям прижима и отвода, пропорциональный требуемым перемещениям штоков гидроцилиндров на заданные расстояния, зависящие от толщины возводимой стены, в результате чего происходит прижим опалубочных щитов. После набора бетоном заданной прочности начинается процесс распалубки, и кон-

17
тур с обратной связью по перемещению обеспечивает возврат штоков гидроцилиндров в исходное положение.
Также разработан алгоритм совместной работы и взаимодействия всех подсистем автоматизированного ППО в ходе возведения здания.
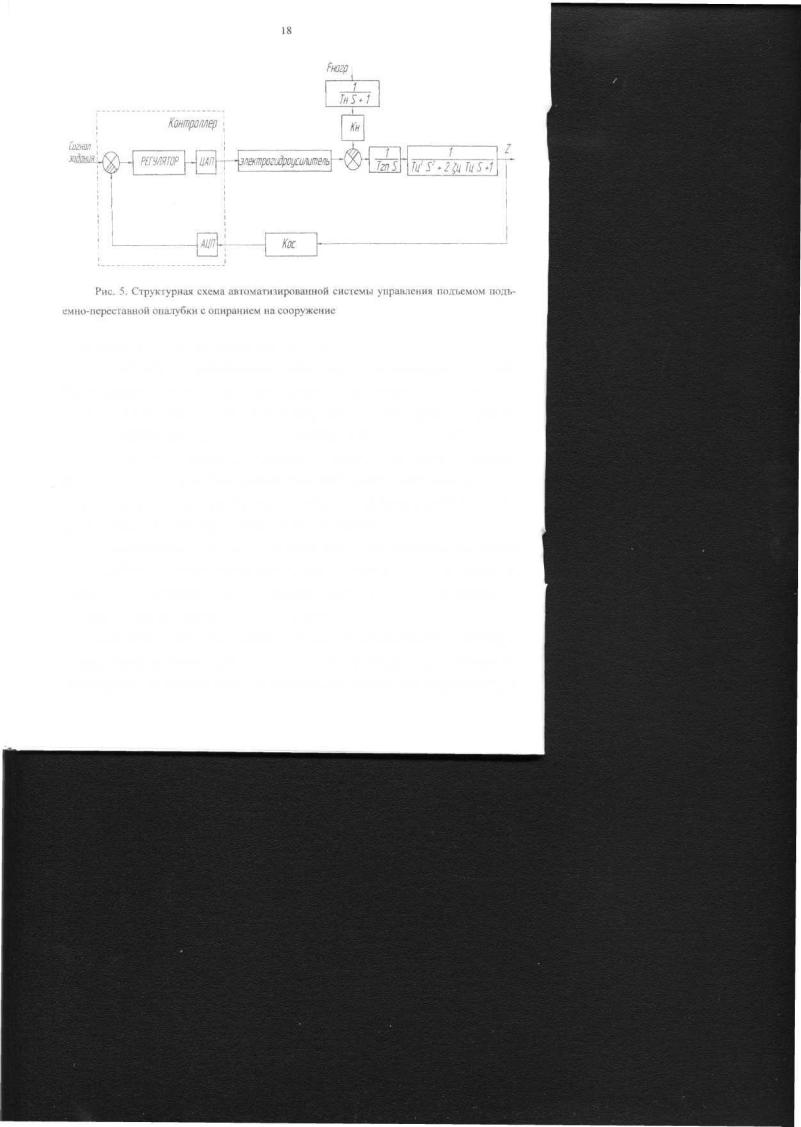
Четвертая глава посвящена математическому моделированию работы автоматизированной системы перемещения ППО. В ходе разработки математической модели автоматизированной системы подъема ППО было выведено уравнение (8), описывающее вертикальное перемещение штока гидроцилиндра домкратного механизма комплекса в зависимости от перемещения золотника и массы комплекса.
На основе данного уравнения составлена структурная схема автоматизированной системы управления (рис. 5).
Из полученной структурной схемы была разработана рабочая simu- 1ink-модель (S-модель) для программного пакета MATLAB. В ходе математического моделирования в данном программном пакете были получены следующие результаты:
- увеличение площади поршней гидроцилиндров Fц уменьшает амплитуду и повышает частоту колебаний контуров скорости и перемещения, вызванных воздействием веса ППО, также увеличение площади ведет к уменьшению
установившейся ошибки в контуре перемещения; - увеличение коэффициента эластичности золотникового преобразователя
Kqp увеличивает перерегулирование в контурах скорости и перемещения, увеличивает установившуюся ошибку в контуре перемещения, при этом с увеличением коэффициента Kqp возрастают демпфирующие свойства контуров;
-увеличение коэффициента усиления регулятора Км уменьшает амплитуду колебаний контуров скорости и перемещения, вызванных воздействием веса ППО, и уменьшает установившуюся ошибку в контуре перемещения, также происходит увеличение перерегулирования в контурах;
- уменьшение постоянной времени регулятора Тм уменьшает амплитуду колебаний контуров скорости и перемещения, вызванных воздействием веса ППО, уменьшает установившуюся ошибку в контуре перемещения, также происходит увеличение быстродействия контуров.
Исходя из данных, полученных в результате математического моделирования, сформулированы следующие рекомендации для проектирования и эксплуатации ППО: целесообразно уменьшить общее количество гидроцилиндров

19
подъема при этом, увеличив площадь их поршней, так как увеличение площади поршня гидроцилиндра благоприятно влияет на свойства гидропривода; при эксплуатации ППО необходимо программным способом компенсировать влияние воздействия её веса на гидросистему, а так же учитывать установившуюся ошибку в контуре перемещения.
Пятая глава посвящена экспериментальным исследованиям, выполненным в научно-исследовательских лабораториях Нижегородского государственного архитектурно-строительного университета.
Были проведены эксперименты по исследованию автоматизированной системы перемещения ППО косвенного метода контроля проектного положения опалубочных щитов.
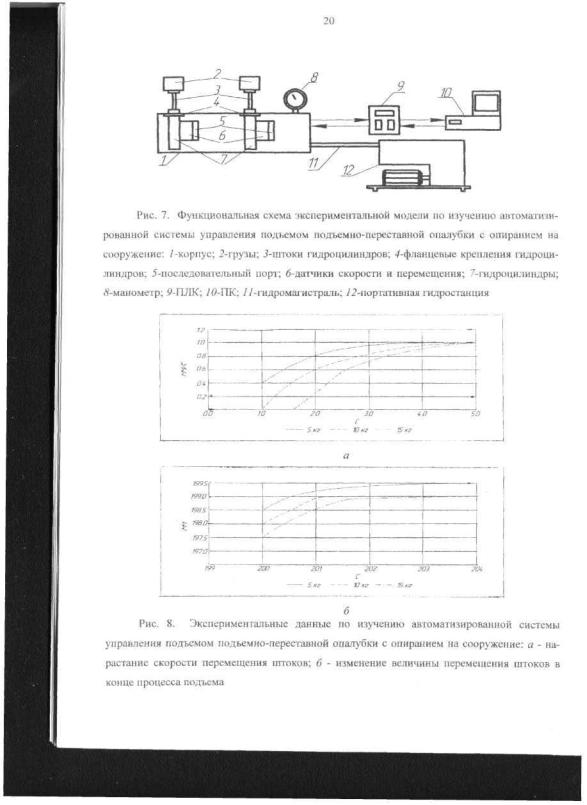
В соответствии с разработанной методикой проведения исследований по изучению работы методов и средств автоматизации перемещения ППО была разработана экспериментальная установка (рис. 7). При проведении эксперимента ставились следующие задачи: проверка синхронности подъема штоков гидроцилиндров и проверка точности их позиционирования при перемещении на заданную величину, при различной нагрузке.
В ходе эксперимента на штоках гидроцилиндров размещались различные по массе грузы, имитирующие нагрузку гидростоек при подъеме опалубочного комплекса. Для каждого случая периодически регистрировались значения величины перемещения и скорости штоков, ошибки по скорости и перемещению.
Лабораторный эксперимент подтвердил: эффективность алгоритма работы и структуры автоматизированной системы управления подъемом ППО, обеспечивающих синхронность подъема и точность позиционирования на заданной высоте (рис. 8); эффективность косвенного метода контроля проектного положения щитов, базирующегося на измерении перемещения штоков гидроцилиндров; соответствие экспериментальных данных и результатов, полученных в ходе математического моделирования, с погрешностью не более 5%.