

Электрические схемы и электрическое оборудование локомотивов
.pdfМИНИСТЕРСТВО ТРАНСПОРТА РОССИЙСКОЙ ФЕДЕРАЦИИ ФЕДЕРАЛЬНОЕ АГЕНТСТВО ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ОБРАЗОВАНИЯ
«САМАРСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ПУТЕЙСООБЩЕНИЯ»
Кафедра «Локомотивы» Контрольная работа
по дисциплине:
«Электрические схемы и электрическое оборудование локомотивов»
Выполнил: студент шифр 1911-ПС-204 Турукин Владислав Драганович Проверил: доцент, к.т.н., Иванов Виталий Викторович
Самара 2023
АННОТАЦИЯ
В данной контрольной работе будет описана конструкция и принцип работы контактных и бесконтактных аппаратов тепловоза. Рассмотрена работа цепи участка электрической цепи тепловоза 2ТЭ10У контакторов возбуждения тягового генератора Данная контрольная работа состоит из 14 страниц, 4
рисунков, 3 таблиц.
Библиографический список содержит 3 наименования.
2
СОДЕРЖАНИЕ |
|
ВВЕДЕНИЕ.................................................................................................................... |
4 |
ИСХОДНЫЕ ДАННЫЕ................................................................................................ |
5 |
1.КОНСТРУКЦИЯ И ПРИНИП РАБОТЫ КОНТАКТНЫХ И |
|
БЕСКОНТАКТНЫХ АППАРАТОВ ТЕПЛОВОЗА .................................................. |
6 |
Контроллер машиниста 2ТЭ10Л ................................................................................. |
6 |
Индуктивный датчик ТЭП70 ....................................................................................... |
8 |
2.РАСЧЁТ КОНТАКТОВ У ЭЛЕКТРИЧЕСКОГО АППАРАТА ТЕПЛОВОЗА ... |
9 |
3.РАЗРАБОТКА УЧАСТКА ЭЛЕКТРИЧЕСКОЙ СХЕМЫ ЦЕПИ |
|
УПРАВЛЕНИЯ ТЕПЛОВОЗОМ ............................................................................... |
10 |
Расчет сечений проводов в электрической схеме тепловоза............................... |
11 |
Разработка алгоритма поиска неисправностей электрической цепи.................. |
11 |
ЗАКЛЮЧЕНИЕ ........................................................................................................... |
13 |
БИБЛИОГРАФИЧЕСКИЙ СПИСОК ....................................................................... |
14 |
3
ВВЕДЕНИЕ
Электрические аппараты работают на тепловозах в тяжелых условиях,
поэтому они должны удовлетворять не только общим (надежность, простота конструкции, взаимозаменяемость, стабильность характеристик), но и особым требованиям: выдерживать вибрации, значительные колебания температуры и напряжения, воздействия влаги, пыли, грязи, масла. Напряжение в силовой цепи меняется от 0 до 900 В, а в цепи управления снижение напряжения допускается до 80% номинального. Колебание давления сжатого воздуха допускается от 75
до 135% номинального. Вибрации вызывают колебания (в основном вертикальные) деталей аппаратов, которые могут вызвать ослабление болтовых соединений, обрыв проводов и ложное срабатывание аппаратов. Чтобы этого не произошло, все крепежные детали – болты, винты, гайки, шпильки – ставят с пружинными шайбами; на ряде аппаратов устанавливают шплинты, контргайки,
шайбы с отгибающимися концами и др.
Ложное срабатывание аппаратов исключается тем, что подвижные части,
имеющие слабые пружины, балансируют, т. е. подбирают так, чтобы масса подвижных частей относительно оси вращения распределялась равномерно.
Часть аппаратов устанавливают на амортизаторах. Наиболее чувствительные и точные аппараты закрывают кожухами (регулятор напряжения, реле давления масла, реле ограничения тока). Надежный электрический контакт обеспечивается путем пайки токоведущих частей припоями и монтажа проводов таким образом, чтобы исключалась возможность их перемещения при вибрации
(небольшие припуски, прибандажировка к неподвижным частям).
4
ИСХОДНЫЕ ДАННЫЕ
Контактные и бесконтактные аппараты тепловозов
Контроллер машиниста |
|
2ТЭ10Л |
|
|
|
|
|
|
Индуктивный датчик |
|
ТЭП70 |
|
|
|
|
|
|
Электрические цепи тепловозов |
|
|
Контакторы возбуждения тягового |
|
генератора |
2ТЭ10У |
|
|
|
|
5
1.КОНСТРУКЦИЯ И ПРИНИП РАБОТЫ КОНТАКТНЫХ И БЕСКОНТАКТНЫХ АППАРАТОВ ТЕПЛОВОЗА
Контроллер машиниста 2ТЭ10Л
Дистанционное управление электрической передачей тепловоза осуществляется контроллером машиниста типа КВ-1509.
При переключении реверсивной рукоятки контроллера изменяется направление движения тепловоза. При изменении положения главной рукоятки контроллера меняется скорость вращения вала дизеля, а следовательно, и его мощность. Контроллер КВ 1509 создан на базе контроллера типа КВ16А-12,
большинство деталей и узлов этих контроллеров унифицировано. Полностью унифицированы: главная и реверсивная рукоятки, корпус, нижняя крышка,
устанавливаемая на корпусе, планки с подвижными и неподвижными контактами, сами контакты, реверсивный вал, детали узлов фиксации и блокировки, шестерня и сектор узла передачи вращения от главной рукоятки к главному валу, все детали главного вала, за исключением нескольких кулачковых шайб.
Контроллер состоит из сварного корпуса, двух литых крышек, главного и реверсивного барабанов, двух изоляционных планок с набором подвижных и неподвижных контактов.
На вал главного барабана набираются кулачковые шайбы, посредством которых осуществляется замыкание и размыкание подвижных контактов в определенной последовательности. Главный и реверсивный валы фиксируются насаженными на них храповиками. Фиксация храповика на каждой позиции рукоятки осуществляется специальными рычагами и пружинами.
Между верхней и нижней крышками вмонтирована зубчатая передача,
состоящая из насаженной на конец вала главного барабана шестерни и зубча-
того сектора, расположенного на отдельном валу, на выступающем конце которого крепится главная рукоятка. Механическая блокировка исключает перемещение реверсивной рукоятки на ходовых положениях главной и
6
перемещение главной рукоятки на нулевом положении реверсивной рукоятки.
Это обеспечивается фиксатором, расположенным между храповиками главного и реверсивного барабанов.
Реверсивная рукоятка выполнена съемной, причем снять ее можно только при нулевом положении главной рукоятки.
Контактная система контроллера пальцевого типа. Подвижной контакт состоит из угольника, закрепленного на изоляционной панели, рычага с роликом, перемещающегося по поверхности кулачковой шайбы, что позволяет включать или выключать контакт, а также гибкого соединения,
обеспечивающего контакт с местом присоединения контактных пружин и неподвижного контакта. Неподвижный контакт крепится на второй изоляционной панели.
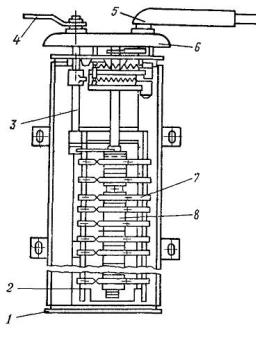
Рисунок 1. Контроллер машиниста КВ 1509 1 — корпус; 2 — планка с неподвижными контактами; 3 — реверсивный вал; 4 —
реверсивная рукоятка; 5 —главная рукоятка; 6 — крышка; 7 — узел подвижного контакта; 8
— главный барабан
Таблица 1. Технические данные:
Длительный ток, А |
10 |
Напряжение, В |
75 |
Нажатие контактов, кгс |
0,34-0,45 |
7
Индуктивный датчик ТЭП70
Индуктивный датчик ИД предназначен для связи системы автоматического регулирования с регулятором дизеля. Он состоит из корпуса, в
котором размещена катушка и подвижный сердечник - якоря. Якорь датчика сочленяется со штоком сервомотора регулятора мощности дизеля.
Датчик представляет собой электрический преобразователь, в котором линейное перемещение якоря вызывает изменение индуктивности и,
следовательно, полного сопротивления катушки. Максимальный сигнал датчика соответствует положению якоря, выдвинутому за корпус, а минимальный -
максимально вдвинутому положению. Таким образом, благодаря такой конструкции индуктивного датчика, сигнал уставки по мощности может меняться и в процессе работы объединенный регулятор дизеля стремится поддерживать мощность тягового генератора равной свободной мощности дизеля.
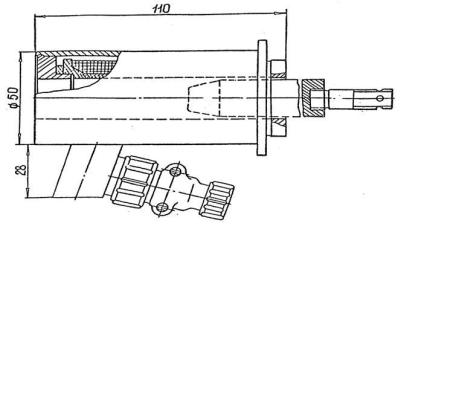
Рисунок 2. Индуктивный датчик ИД-42УХЛ3
Таблица 2. Технические данные:
Номинальный ток, А |
0,26 |
Напряжение, В |
17 |
Частота питающего напряжения, Гц |
220 |
8

2.РАСЧЁТ КОНТАКТОВ У ЭЛЕКТРИЧЕСКОГО АППАРАТА ТЕПЛОВОЗА
Сила конечного нажатия главных контактов, (Н)
F |
С J |
p |
КН |
1 |
где: Jp - расчетное значение тока, протекающего по главным контактам, А;
C1 - коэффициент, зависящий от режима работы аппарата и материала главных контактов (табл. 1.2), Н/А.
F |
0,663 300 199 |
Н |
|
КН |
|
|
|
Зазор главных контактов, (мм) |
|
|
|
|
Р С U |
p |
|
|
2 |
|
|
где: Up - расчетное значение напряжения, приложенное к разомкнутым контактам, В; С2 - коэффициент, зависящий от режима работы аппарата и материала
контактов, мм/В (табл. 1.2).
Р 0,015 40 0,6 мм
Таблица 3
Значения коэффициентов C1 и С2 для электропневматических аппаратов
Наименование аппарата |
С1, Н/А |
С2, мм/В |
|
|
|
Поездные контакторы |
0,663 |
0,015 |
|
|
|
Контактное сопротивление определяется из выражения, (Ом)
J H Rn U g 0,5 0,8 U к
где: JH - номинальный ток, проходящий через замкнутый контакт, А; Ug - допустимое значение падения напряжения, В; Ug=0,12В.
Откуда
R |
|
|
0,5 0,8 U |
к |
|
|
|
|
|
|
|
|
n |
|
J |
|
|
|
|
|
H |
|
|
|
|
|
|
|
|
Rn 0300,12 0,0004Ом
9
3.РАЗРАБОТКА УЧАСТКА ЭЛЕКТРИЧЕСКОЙ СХЕМЫ ЦЕПИ УПРАВЛЕНИЯ ТЕПЛОВОЗОМ
В данном практикуме производим разработку участка электрической цепи контактора возбуждения тягового генератора 2ТЭ10У.
Поиск отказавших элементов является одной из самых трудоёмких операций, требующих безукоризненного знания электрической схемы локомотива, мест расположения аппаратов, умения логически сопоставлять результаты внешнего осмотра, показаний контрольно-измерительных приборов,
результаты проверок отдельных элементов электрической цепи. Под отказом понимают такое состояние элемента электрической цепи, когда нарушена его работоспособность.
Если при проверке работоспособности узлов установлено, что в каком-
либо из них возник отказ, то дальнейшую проверку прекращают и приступают к определению аппарата данного узла, в котором возник отказ. Каждая операция управления осуществляется определенными аппаратами, причем эти аппараты срабатывают в строго определенной последовательности.
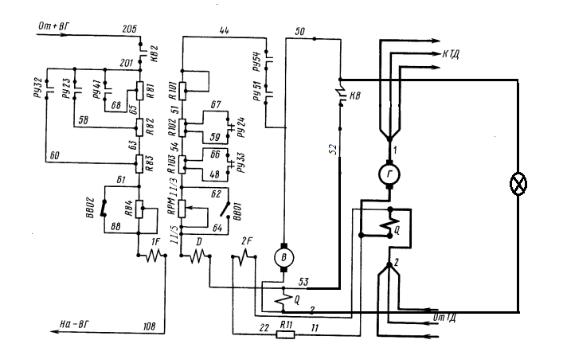
Рисунок 3 Электрическая схема возбуждения тягового генератора
10