

книги / Автоматизация в электроэнергетике и электротехнике
..pdfНа схеме (см. рис. 1) введены сле- |
нейных |
|
дифференциальных уравнений |
||||||||||||||||||||||||||
дующие обозначения: UABC1, |
UABC2 – |
относительно переменных состояния Ф, |
|||||||||||||||||||||||||||
трехфазные напряжения, подаваемые на |
iг, ω: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
асинхронный |
и |
синхронный двигатели |
|
|
|
|
|
|
F = iвw, |
|
|
|
|
|
|
|
|
||||||||||||
соответственно, В; ω – угловая скорость |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
Φ = Λ(F), |
|
|
|
|
|
|
|
||||||||||||||||
вращения ИИТ, рад/с; Uвозб1 и |
Uвозб2 – |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
diв |
|
|
|
|
|
dΦ |
|
|
|
||||||||
напряжения, подаваемые на обмотку |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(1) |
|||||||||
возбуждения СД и обмотку независимо- |
|
|
uв = iвrв + Lв dt |
+ w |
dt , |
|
|
|
|||||||||||||||||||||
го возбуждения генератора соответст- |
c ωΦ = i r |
+ L |
diг +i R |
− L |
diг |
, |
|||||||||||||||||||||||
венно, В; МСД и Мг – электромагнитный |
э |
|
|
г я |
|
|
|
я |
dt |
|
г |
|
|
н |
н |
dt |
|
||||||||||||
момент СД и ГПТ НВ соответствен- |
где F – магнитодвижущая сила, А; Ф – |
||||||||||||||||||||||||||||
но, Н·м; iг – выходной ток генератора, А. |
поток, |
|
создаваемый |
генератором, Вб; |
|||||||||||||||||||||||||
Ток на выходе ИИТ должен пред- |
Λ(F) – кривая намагничивания генера- |
||||||||||||||||||||||||||||
ставлять собой последовательность пар |
|||||||||||||||||||||||||||||
трапецеидальных |
разнополярных |
им- |
тора; uв, Lв, iв, rв, w – напряжение, В, ток, |
||||||||||||||||||||||||||
пульсов. Форма |
импульса |
положитель- |
А, индуктивность, Гн, активное сопро- |
||||||||||||||||||||||||||
ной полярности показана на рис. 2. |
|
тивление, Ом, в обмотке возбуждения и |
|||||||||||||||||||||||||||
|
число витков в ней соответственно; iг – |
||||||||||||||||||||||||||||
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
ток генератора, А; сэ – электрическая по- |
|||||||||||||||||||||||
|
|
|
|
|
|
стоянная; Lя, rя – индуктивность, Гн, и |
|||||||||||||||||||||||
|
|
|
|
|
|
сопротивление, Ом, обмотки якоря; Lн, |
|||||||||||||||||||||||
|
|
|
|
|
|
rн – индуктивность, Гн, и активное со- |
|||||||||||||||||||||||
|
|
|
|
|
|
противление, Ом, нагрузки. |
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
Допустим, что ИИТ вращается с |
|||||||||||||||||||||||
|
|
|
|
|
|
синхронной скоростью ωс, кривая на- |
|||||||||||||||||||||||
Рис. 2. Форма импульсов тока в генераторе |
магничивания Λ(F ) |
|
ГПТ НВ изменяется |
||||||||||||||||||||||||||
линейно с коэффициентом kв, тогда |
|||||||||||||||||||||||||||||
|
|
|
|
|
|
||||||||||||||||||||||||
К форме |
импульса предъявляются |
уравнение (1) преобразуется к виду |
|
||||||||||||||||||||||||||
следующие требования: |
|
|
|
Φ = Λ(F) = p (iвw) = w p (iв ) = wkвiв, |
|||||||||||||||||||||||||
− длительность фронтов по времени |
|
|
|
|
|
|
|
|
|
diв |
|
|
|
|
|
|
diв , |
|
|
|
|||||||||
не должна превышать Тф; |
|
|
|
u |
|
= i r + L |
|
|
+ w2k |
|
|
|
(2) |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
− амплитуда пар импульсов меняет- |
|
в |
|
в в |
|
в |
|
|
dt |
|
|
|
|
в |
dt |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
diг |
|
|
|
|
|
|
diг |
|||||||||||
ся от Аmax до Аmin по заданному закону; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
− амплитуды |
парных |
разнополяр- |
cэωсwkвiв = iгrя + Lя |
|
dt |
+iгRн − Lн dt . |
|||||||||||||||||||||||
ных импульсов должны быть одинако- |
Для удобства работы с системой (2) |
||||||||||||||||||||||||||||
выми; |
|
|
|
|
|
введем следующие обозначения: |
|
|
|
||||||||||||||||||||
− максимальная ошибка по току при |
|
|
|
diв |
|
= bu |
|
−a |
i |
, |
|
|
|
|
|
||||||||||||||
формировании |
импульса |
не |
должна |
|
|
|
|
в |
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
dt |
|
|
|
|
|
|
11 |
в |
|
|
|
|
|
|
|
|||||||||||
превышать значение ∆, равное 0,25 % ве- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
diг = a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
личины амплитуды текущей пары |
им- |
|
|
|
|
i |
|
−a |
i |
|
, |
|
|
|
|
|
|||||||||||||
пульсов. |
|
|
|
|
|
|
|
|
dt |
|
|
21 |
в |
|
11 |
г |
|
|
|
|
|
|
|||||||
|
|
|
|
|
b =1/ (L + w2k |
|
), |
|
a |
|
= r |
/ |
|
(L + w2k |
|
), (3) |
|||||||||||||
|
|
|
|
|
|
в |
|
|
|
в |
|||||||||||||||||||
Математическое описание ГПТ НВ |
|
в |
|
|
|
|
11 |
|
|
в |
|
|
|
|
в |
|
|
||||||||||||
a21 = cэωсwkв / (Lя + Lн ); |
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
Математическое описание ГПТ НВ |
a22 = (rя + Rн ) / (Lя + Lн ). |
|
|
|
|||||||||||||||||||||||||
по работе [4] |
– это система трех нели- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
101 |
|

Согласно выражениям (3) построим структурную схему ГПТ НВ, представленную на рис. 3.
Рис. 3. Структурная схема ГПТ НВ
Таким образом, при вращении ИИТ с синхронной скоростью математическая модель ГПТ НВ представляет собой систему из двух нелинейных дифференциальных уравнений.
Исследование устойчивости ГПТ НВ
Для анализа устойчивости ГПТ НВ воспользуемся критерием абсолютной устойчивости В.М. Попова для класса нелинейных систем с нелинейностью типа трехпозиционное реле [3], характеристика которого приведена на рис. 4.
Рис. 4. Характеристика нелинейного объекта
Для исследования системы с помощью критерия В.М. Попова необходимо определить сектор, в котором находится характеристика трехпозиционного реле. Целесообразно в качестве прямых, задающих секторные ограничения, наряду с осью абсцисс выбрать крайнюю прямую, проходящую через точки разрыва характеристики нелинейного элемента (см. рис. 4). Кроме того, необходимо провести анализ устойчивости линейной части системы управления.
102
Как видно из рис. 3, передаточная функция линейной части состоит из двух последовательно соединенных апериодических звеньев:
Wл = |
|
a21 |
|
|
. |
(4) |
(s +a |
)(s +a |
22 |
) |
|||
|
11 |
|
|
|
|
Тогда структурную схему ГПТ НВ можно преобразовать к виду, представленному на рис. 5.
Рис. 5. Структурная схема ГПТ НВ (преобразованная)
Анализ устойчивости передаточной функции вида (4) может быть проведен любым из известных методов. Например, если провести расчет для параметров ГПТ НВ, то у передаточной функции
(4) полюсы будут действительными,
равными p1 = –1,9214 и p2 = –0,3875, что свидетельствует об устойчивости передаточной функции линейной части системы.
Для устойчивости всей системы (см. рис. 5) при условии устойчивости передаточной функции линейной части необходимо и достаточно показать, что существует такое вещественное число q, что при всех ω, 0 ≤ ω < ∞,
Re (1+ jqω)W |
( jω) + |
1 |
≥ δ > 0. |
(5) |
|
|
л |
|
k |
|
|
|
|
|
|
|
|
Частотная передаточная функция Wл ( jω) линейной части определяется выражением
Wл ( jω) =Wл (s) s= jω =
= |
|
a21 |
|
|
× |
|
( jω+a |
|
)( jω+a |
22 |
) |
||
|
11 |
|
|
|
||
×(− jω+a11 )(− jω+a22 ) = (− jω+a11 )(− jω+a22 )
|
|
|
= |
|
|
|
|
a21 (a11a22 −ω2 ) |
+ |
|
|
|
|
Раскрываем скобки и приводим по- |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
добные члены в неравенстве (9): |
|
|
||||||||||||||
|
|
|
|
(a112 +ω2 )(a222 +ω2 ) |
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ω4 + |
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
a21ω(−a11 −a22 ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
+ j |
|
|
|
|
. |
|
|
|
(6) |
+ (a112 +a222 |
−ka21 +kqa11a21 +kqa21a22 )× |
|||||||||||||||||||
|
|
|
|
(a112 +ω2 )(a222 +ω2 ) |
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
×ω2 +(a112 a222 +ka11a21a22 ) > 0. |
(10) |
|||||||||||||||||||
|
|
Вычислим (1+ jqω)Wл ( jω) в левой |
||||||||||||||||||||||||||||||||
|
|
Поскольку коэффициент при стар- |
||||||||||||||||||||||||||||||||
части уравнения (5) с учетом выраже- |
||||||||||||||||||||||||||||||||||
шей степени |
биквадратного |
уравнения |
||||||||||||||||||||||||||||||||
ния (6): |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(10) всегда будет положительным, ветви |
|||||||||||||||
|
|
|
(1+ jqω)Wл ( jω) = (1+ jqω)× |
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
параболы будут направлены вверх. Те- |
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
a21 (a11a22 −ω2 ) |
|
|
|
|
|
|
|
перь для решения неравенства (10) необ- |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ходимо определить |
значение вершины |
|||||||||||||||||||
|
|
|
× |
|
|
|
|
|
|
|
|
|
|
|
+ |
|
|
|
|
|||||||||||||||
|
|
|
|
(a112 +ω2 )(a222 +ω2 ) |
|
|
|
|
параболы, |
которая |
должна |
лежать в |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
верхней полуплоскости: |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
a |
|
ω(−a −a ) |
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
+ j |
|
|
|
|
|
|
|
|
|
|
|
|
|
yω = |
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
21 |
11 |
|
22 |
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
(a2 |
|
+ω2 )(a2 |
|
+ω2 ) |
|
|
|
|
|
|
|
= (−(a112 +a222 −ka21 +kqa11a21 +kqa21a22 )2 + |
||||||||||||||||
|
|
|
|
|
|
|
|
11 |
|
22 |
|
|
|
|
|
|
|
|
||||||||||||||||
= |
a11a21a22 −a21ω2 (1+q (−a11 |
|
−a22 )) |
+ |
+ 4(a112 a222 +ka11a21a22 ) |
)/ |
|
|
||||||||||||||||||||||||||
|
|
|
|
(a112 +ω2 )(a222 +ω2 ) |
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
+ |
j |
|
a21ω(−a11 −a22 +qa11a22 |
−qω2 ) |
. |
(7) |
/ (4(a112 a222 |
+ ka11a21a22 )) > 0. |
(11) |
|||||||||||||||||||||||||
|
|
|
|
|
(a112 +ω2 )(a222 +ω2 ) |
|
|
Проведем аналогичные (9) и (10) |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
Таким образом, подставляя выраже- |
действия с уравнением относительно пе- |
|||||||||||||||||||||||||||||||
ние (7) в уравнение (5), получим нера- |
ременной q (11): |
|
|
|
|
|
|
|
||||||||||||||||||||||||||
венство |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
−(a112 + a222 −ka21 +kqa11a21 +kqa21a22 )2 + |
|||||||||||||||
|
a11a21a22 −a21ω2 (1+q (−a11 −a22 )) |
+ |
|
+ 4(a112 a222 +ka11a21a22 ) > 0 |
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
(a112 +ω2 )(a222 +ω2 ) |
|
|
|
|
|
|
(8) |
−(ka |
a |
|
+ ka |
a |
)2 q2 − |
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
21 |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
11 |
|
|
21 |
22 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
+ k > 0, |
|
|
|
|
|
|
|
|
|
|
− 2(ka11a21 +ka21a22 )(a112 + a222 |
−ka21 ) q + |
|||||||||||
где k = uв0 / (wa) > 0 |
согласно характери- |
2 |
2 |
|
|
2 |
|
2 |
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+(4a11a22 −(a11 + a22 −ka21 ) |
2 |
+ |
|
||||||||
стике нелинейного объекта (см. рис. 4). |
|
|
||||||||||||||||||||||||||||||||
|
+4ka11a21a22 ) > 0. |
|
|
|
(12) |
|||||||||||||||||||||||||||||
|
|
Ввиду положительности коэффици- |
|
|
|
|
||||||||||||||||||||||||||||
ента k и за счет того, |
|
что знаменатель |
Отрицательность старшего коэффи- |
|||||||||||||||||||||||||||||||
первой дроби принимает только положи- |
||||||||||||||||||||||||||||||||||
циента квадратного уравнения неравен- |
||||||||||||||||||||||||||||||||||
тельные значения, так как представляет |
ства (12) говорит о том, что ветви пара- |
|||||||||||||||||||||||||||||||||
собой произведение сумм квадратов вы- |
болы направлены вниз. Поэтому, чтобы |
|||||||||||||||||||||||||||||||||
ражений, домножение неравенства (8) на |
неравенство (12) |
выполнялось |
|
при |
ка- |
|||||||||||||||||||||||||||||
знаменатель не изменит знак: |
|
|
|
|
|
|
|
ких-либо вещественных значениях q, не- |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
обходимо и достаточно обеспечить на- |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
2 |
+ q (−a11 −a22 )) k + |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
a11a21a22 −a21ω (1 |
хождение вершины параболы в верхней |
|||||||||||||||||||||||||||||||||
|
|
|
|
+ (a112 |
+ω2 )(a222 |
+ω2 ) > 0. |
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
(9) |
полуплоскости: |
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
103 |
|
yq =((4(ka11a21 +ka21a22 )2 ×
×(a112 +a222 −ka21 )2 )/
/(4(ka11a21 +ka21a22 )2 ))+
+(4a112 a222 −(a112 +a222 −ka21 )2 +
+(4ka11a21a22 )) > 0. |
(13) |
Решаем неравенство (13) снова по аналогии с (9) относительно переменной k:
4(ka11a21 +ka21a22 )2 ×
×(a112 +a222 −ka21 )2 +
+4(ka11a21 + ka21a22 )2 ×
×(4a112 a222 −(a112 + a222 −ka21 )2 +
|
+4ka11a21a22 ) |
> 0, |
|
|||||
8a21 (a11a21 +a21a22 )2 |
(a112 |
+a222 )− (14) |
||||||
|
(8a21 (a112 +a222 )+16a11a21a22 )× |
|||||||
− |
||||||||
|
×(a a |
+a a |
)2 k + |
|||||
|
11 |
21 |
21 |
22 |
|
|
||
|
+ (a a |
+a a |
22 |
)2 |
× |
|||
|
|
11 |
21 |
21 |
|
|
||
|
×(4(a112 +a222 )−16a112 a222 )− |
|||||||
− 4(a11a21 + a21a22 )2 (a112 +a222 ) > 0.
Решая неравенство (14), получаем
k > |
−a21 |
. |
(15) |
||
|
|||||
|
a |
a |
22 |
|
|
|
11 |
|
|
|
|
Последнее неравенство (15) выполняется при любых положительных значениях параметра k. Таким образом, существует множество вещественных значений q, при котором неравенство (13) выполняется. Этого достаточно, чтобы согласно критерию В.М. Попова система была устойчива.
104
Заключение
В работе было представлено математическое описание функционального элемента одного из вариантов исполнения исследуемого объекта – ИИТ большой мощности на основе электромеханических преобразователей энергии, который предназначен для создания сильного импульсного магнитного поля. С этой целью формируется импульсная последовательность тока из пар разнополярных импульсов заданной формы, в качестве которой была выбрана трапецеидальная с заданными значениями нарастания и спада фронтов, времени и точности поддержания требуемой амплитуды тока.
Генерация импульсного магнитного поля представляет собой сложный процесс, включающий нелинейные функции, поэтому важным пунктом разработки ИИТ является исследование области его устойчивости. На начальном этапе в качестве объекта был выбран не весь ИИТ, а ГПТ НВ, входящий в его состав. Поскольку непосредственное формирование импульсов тока происходит после того, когда система разгоняется до синхронной скорости и СД входит в синхронизм, то уравнение механической части из математического описания генератора можно исключить и можно считать, что его кривая намагничивания изменяется по линейному закону. Таким образом, за счет выбранного для питания обмотки возбуждения полупроводникового управляющего устройства, работающего в ключевом режиме, в математической модели ГПТ НВ присутствует только одна однозначная нелинейность типа трехпозиционного реле. В качестве критерия устойчивости был использован метод абсолютной устойчивости
В.М. Попова для класса нелинейных |
Р.Ф. Мисников // Труды ЦНИИ им. акад. |
систем (5). В результате его применения |
А.Н. Крылова. – 2015. – № 89(373). – |
было установлено, что существует мно- |
С. 267–279. |
жество вещественных значений q, при |
2. Карасик В.Р. Физика и техника |
которых генератор является устойчивым. |
сильных магнитных полей. – М.: Наука, |
|
1964. – 340 с. |
Список литературы |
3. Ким Д.П. Теория автоматического |
1. Особенности применения молеку- |
управления. – М.: Физмалит, 2004. – |
Т. 2. – 464 с. |
|
лярных накопителей энергии в импульс- |
4. Мирошников А.Н., Румянцев С.Н. |
ных источниках питания / Б.В. Брусли- |
Моделирование систем управления тех- |
новский, Н.В. Голодный, И.В. Карма- |
нических средств транспорта. – СПб.: |
нов, А.Ю. Крыжановский, К.И. Матус, |
Элмор, 1999. – 224 с. |
105
УДК 621.315
ОПРЕДЕЛЕНИЕ ПАРАМЕТРОВ И МЕСТ УСТАНОВКИ УСТРОЙСТВ УПРАВЛЕНИЯПЕРЕДАЧЕЙЭЛЕКТРОЭНЕРГИИ
Н.Д. Поляхов1, И.А. Приходько1, И.В. Швыров2
1 Санкт-Петербургский государственный электротехнический университет «ЛЭТИ» им. В.И. Ульянова (Ленина)
2 ПАО «МРСК Северо-Запада», Санкт-Петербург
Рассмотрено применение генетических, муравьиных и пчелиных алгоритмов для оптимизации параметров и мест установки устройств управления передачей электроэнергии на примере стандартной 30-узловой схемы с тепловыми электростанциями (ТЭС): шесть ТЭС и 24 нагрузочные станции. Использование эволюционных алгоритмов в задачах с дискретными значениями переменных не требует какихлибо допущений и упрощений задачи. В результате оптимизации потери в системе уменьшились на 3,5 %, время расчета задачи снизилось почти в два раза.
Ключевые слова: оптимизация, режим, электроэнергетическая система, мощность, генетический алгоритм, муравьиный алгоритм, пчелиный алгоритм, устройства управления передачей электроэнергии.
DETERMINATION OF THE PARAMETERS AND PLACE
OF THE INSTALLATION FLEXIBLE AC TRANSMISSION SYSTEMS
N.D. Polyakhov1, I.A. Prikhodko1, I.V. Shvyrov2
1 Saint Petersburg Electrotechnical University “LETI”
2 IDGC of the North-West, Saint Petersburg
The paper discusses the application of genetic algorithms, ant colony optimization, artificial bee colony optimization for parameter optimization and field installation of control devices power transmission on the example of standard 30-nodes diagram with the thermal power stations (TPS): 6 TPS and 24 load stations. The use of evolutionary algorithms in problems with discrete variables does not require any assumptions and simplifications of a task. As a result of optimization of losses in the system decreased by 3.5%, computation time of the task has decreased almost in 2 times.
Keywords: optimization, operating conditions, power system, power, genetic algorithm, ant colony optimization, artificial bee colony optimization, Flexible AC Transmission Systems.
Основной причиной повышенного внимания к задачам оптимизации в энергосистемах является возможность без каких-либо дополнительных капитальных вложений на оборудование или другие мероприятия, с помощью оптимизации и анализа той или иной задачи достигнуть экономии затрат на решение поставленной задачи.
Современный этап развития ЭС характеризуется повышением требований к их использованию в условиях существенного ограничения на выделяемые ресурсы (возрастающее энергопотребление при сохранении низких темпов ввода и модернизации энергообъектов и недостаточном расширении существующих сетей передачи электроэнергии). Акту-
альным становится разработка и внедрение новых технологий оптимизации.
В настоящее время рассматриваются вопросы решения технических задач с помощью методов искусственного интеллекта: нечеткой логики, искусственных нейронных сетей, эволюционных алгоритмов (ЭА).
Эволюционные алгоритмы – направление в искусственном интеллекте, которое использует и моделирует процессы естественного отбора.
При поиске экстремума на первом шаге происходит случайная генерация в области допустимых значений возможных решений, которые соответствуют некоторому значению целевой функции. На следующем шаге выбираются наибо-
106
лее подходящие (в зависимости от значения целевой функции) решения, вблизи которых определенным способом выделяются «перспективные» решения для дальнейшего их рассмотрения и участия в процессе поиска оптимальных решений. Выбор наиболее подходящих решений (точек) соответствует естественному отбору (селекции) в реальности.
Несмотря на приведенное обобщение, эволюционные алгоритмы имеют между собой принципиальные отличия, так, генетические алгоритмы (ГА) оперируют не числовыми значениями переменных, а закодированным числом в виде вектора, состоящего из нулей и единиц. Данное обстоятельство позволяет применять специфичные операторы «скрещивания» и «мутации». Пчелиные (ПА) [5] и муравьиные (МА) [6] алгоритмы оперируют числовыми значениями. Особенностью МА является то, что при поиске решения на каждой итерации алгоритм опирается не только на предыдущие решения (как в пчелином алгоритме), но и на решения, которые были получены на всех предшествующих итерациях.
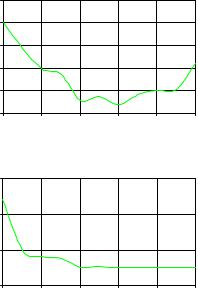
На рис. 1 показано влияние изменения параметров ГА на значение целевой функции [3]. На рис. 1, а приведена зависимость значения целевой функции (ЦФ) от вероятности кроссовера (значение вероятности мутации равно нулю, значение начальной популяции равно 20). На рис. 1, б приведена зависимость значения целевой функции от вероятности мутации (значение вероятности кроссовера равно нулю, значение начальной популяции равно 20). В первом случае целевая функция имеет наименьшее значение при значении кроссовера 0,4–0,6, во втором случае целевая функция принимает наименьшее значение при величине мутации больше 0,4.
На рис. 2 показано влияние изменения параметров ПА на значение целевой
|
788 |
|
|
|
|
|
|
784 |
|
|
|
|
|
|
780 |
|
|
|
|
|
ЦФ |
776 |
|
|
|
|
|
|
|
|
|
|
|
|
|
772 |
|
|
|
|
|
|
768 |
|
|
|
|
|
|
0 |
0,2 |
0,4 |
0,6 |
0,8 |
1 |
|
|
|
Кроссовер |
|
|
|
|
|
|
а |
|
|
|
|
790 |
|
|
|
|
|
|
780 |
|
|
|
|
|
ЦФ |
770 |
|
|
|
|
|
|
|
|
|
|
|
|
|
760 |
|
|
|
|
|
|
0 |
0,2 |
0,4 |
0,6 |
0,8 |
1 |
Мутация
б
Рис. 1. Влияние параметров ГА на значение целевой функции
функции [4]. На рис. 2, а приведена зависимость значения целевой функции от числа решений в окрестности лучших решений (количество начальных решений – 5, лучших решений – 2, размер окрестности – 1). На рис. 2, б приведена зависимость значения целевой функции от значения окрестности (количество начальных решений – 5, лучших решений – 2, число решений в окрестности – 7). В первом случае целевая функция принимает наименьшее значение при количестве решений в окрестности лучших решений больше 6, во втором случае – при значении окрестности 1.
На рис. 3 показано влияние изменения параметров МА на значение целевой функции. На рис. 3, а приведена зависимость значения целевой функции от числа «плохих» решений (количество начальных решений – 10, «хороших» решений – 6, размер окрестности – 2). На рис. 3, б приведена зависимость значения целевой функции от числа начальных решений (количество «хороших» решений – 2, «плохих» решений – 1,
107
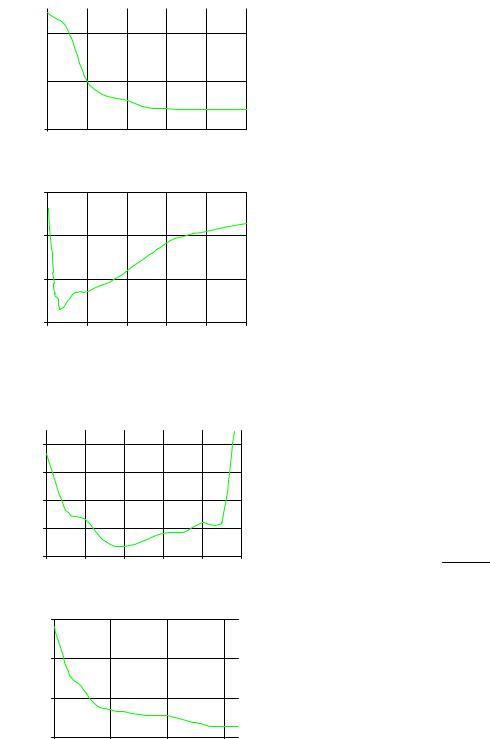
размер окрестности – 2). В первом слу- |
Муравьиный алгоритм: |
|
|
|
|
|
||||||||||||||
чае целевая функция имеет наименьшее |
1. Случайным |
образом |
|
в |
области |
|||||||||||||||
значение при значении «плохих» реше- |
допустимых значений генерируется на- |
|||||||||||||||||||
ний, равном 4, во втором случае – при |
бор возможных решений N. |
|
|
|
|
|
||||||||||||||
значении начальных решений больше 14. |
2. Решения |
сортируются |
в |
зависи- |
||||||||||||||||
|
|
|
|
|
|
|
мости от их пригодности (значения це- |
|||||||||||||
|
770 |
|
|
|
|
|
левой функции), от лучшего к худшему. |
|||||||||||||
ЦФ |
|
|
|
|
|
|
3. Происходит |
|
обновление |
пока- |
||||||||||
766 |
|
|
|
|
|
зателя |
интенсивности |
фермента |
τij |
|||||||||||
|
|
|
|
|
|
|
( τij 0 |
= 1) |
для |
каждой переменной j |
||||||||||
|
762 |
|
|
|
|
|
решения i согласно позиции в отсорти- |
|||||||||||||
|
0 |
2 |
4 |
6 |
8 |
10 |
||||||||||||||
|
рованном списке, |
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
Best Bees |
|
|
|
|
|
|
|
|
|
|
|||||||
|
769 |
|
а |
|
|
|
|
τij |
= τij0 +α(NG −i), i < NG, |
|
|
|||||||||
|
|
|
|
|
|
|
где α – вес фермента, характеризующий |
|||||||||||||
|
767 |
|
|
|
|
|
величину |
обновления |
показателя |
|
τij , |
|||||||||
|
|
|
|
|
|
|
|
|||||||||||||
ЦФ |
765 |
|
|
|
|
|
α [0,1] |
|
(принимаем α = 0,5 ); NG – чис- |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ло пригодных решений. |
|
|
|
|
|
|
|||||||
|
763 |
|
|
|
|
|
4. Каждому решению приписывает- |
|||||||||||||
|
0 |
3 |
6 |
9 |
12 |
15 |
ся |
значение |
случайной |
|
величины |
|||||||||
|
|
|
|
R |
|
|
|
|||||||||||||
|
|
|
|
|
|
p [0,1]. Модификация решения произ- |
||||||||||||||
|
|
|
б |
|
|
|
||||||||||||||
|
|
|
|
|
|
водится, если величина р меньше задан- |
||||||||||||||
Рис. 2. Влияние параметров ПА на значение |
||||||||||||||||||||
|
|
целевой функции |
|
|
ного |
значения |
q [0,1] |
(принимаем |
||||||||||||
|
771 |
|
|
|
|
|
q = 0,9, |
|
чтобы |
большинство |
решений |
|||||||||
|
|
|
|
|
|
участвовали в процессе модификации). |
||||||||||||||
|
769 |
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
Вероятность для решения i выбрать |
||||||||||||||
|
|
|
|
|
|
|
||||||||||||||
ЦФ |
767 |
|
|
|
|
|
переменную |
j определяется |
|
случайным |
||||||||||
|
|
|
|
|
|
выбором из вероятностей p j |
|
где |
|
|
||||||||||
|
765 |
|
|
|
|
|
, |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
763 |
|
|
|
|
|
|
|
|
|
|
p j |
= |
|
τj |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i . |
|
|
|
|
||||
|
0 |
2 |
4 |
6 |
8 |
10 |
|
|
|
|
|
i |
|
|
N |
|
|
|
|
|
|
|
|
Bad Ants |
|
|
|
|
|
|
|
|
|
∑i=1 τij |
|
|
|
|
|
||
|
|
|
а |
|
|
|
5. Отбрасываются худшие решения |
|||||||||||||
|
770 |
|
|
|
|
|
и случайным образом генерируется та- |
|||||||||||||
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
кое |
же |
количество |
новых |
|
возможных |
||||||||
|
768 |
|
|
|
|
|
решений. |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
ЦФ |
766 |
|
|
|
|
|
6. Обновление |
показателя |
τij |
|
для |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
каждого |
|
решения |
происходит |
согласно |
||||||||||
|
|
|
|
|
|
|
|
|||||||||||||
|
764 |
|
|
|
|
|
новой сортировке: |
|
|
|
|
|
|
|
|
|||||
|
2 |
6 |
|
10 |
|
14 |
|
|
|
|
|
|
+α(NG −i), i < NG, |
|||||||
|
|
|
|
N |
|
|
i |
|
|
|
i |
|
||||||||
|
|
|
б |
|
|
|
τj (t +1) = ρτj (t) |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 3. Влияние параметров МА на значение |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
целевой функции |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
108
в противном случае τij (t +1) = ρτij (t), где
τij (t +1) – значение показателя τij на следующем шаге; ρ – интенсивность испарения фермента, ρ [0,1] (принимаем
ρ= 0,7 ).
7.Случайный поиск. Чтобы сохранить скорость вычисления алгоритма, случайный поиск применяется только к лучшему решению в некоторой окрестности координат возможного решения.
После нескольких новых решений алгоритм выбирает между лучшим и случайным решением. Алгоритм повторяется до тех пор, пока не сработает ка- кой-нибудь из критериев остановки.
Среди общих особенностей эволюционных алгоритмов можно отметить следующие:
1.Эволюционные алгоритмы – поисковые алгоритмы оптимизации, которые не гарантируют нахождения (глобального оптимума) точного решения, тем не менее с их помощью можно «достаточно быстро и достаточно точно» получить решение.
2.На каждой итерации оперируют совокупностью решений.
3.Не требуют каких-либо дополнительных ограничений для оптимизируемой функции (непрерывность, дифференцируемость), что является особенно важным для решения практических (реальных) задач.
4.Достаточно просты в понимании
ив реализации в виде программы.
5.В зависимости от условий задачи приведенные алгоритмы можно настраивать, например, по точности или скорости выполнения, что определяется выбором определенных параметров для каждого алгоритма.
В современной электротехнике особое место занимают так называемые устройства FACTS (Flexible AC
Transmission Systems), или гибкие сис-
темы передачи переменного тока (в отечественных публикациях чаще встреча-
ется термин «устройства управления передачей электроэнергии»). Основная функция FACTS заключается в возможности «гибкого» управления режимами в реальном времени: поддержания необходимого уровня напряжения в сети, управления потоками мощности, повышения пропускной способности линий электропередач, повышения статической и динамической устойчивости ЭС.
Целью исследования является оценка влияния компенсирующих устройств (КУ) (линейных регуляторов (ЛР)) на параметры режима ЭС.
Формулировка задачи определения оптимальных параметров и мест установки устройств FACTS:
• минимизировать целевую функцию F, представляющую собой суммарные потери активной мощности ∆P (Qi )
вЭС:
–в случае размещения КУ
n
F= ∑∆P (QКУi ) → min,
i=1
где QКУi – вектор значений реактивных
мощностей КУ;
– в случае размещения линейных регуляторов (ЛР)
n
F= ∑∆P (δЛРi ) → min,
i=1
где δЛРi – вектор значений углов ЛР;
• учитывать ограничения в виде равенств, представляющие собой уравнения установившегося режима [1]:
– для КУ
Pk −Vk2Gkk −
−Vk ∑Vm (Gkm cos δkm + Bkm sin δkm ) = 0, m k
109
Qk +QКУi +Vk2 Bkk +
+Vk ∑Vm (Bkm cos δkm −Gkm sin δkm ) = 0, m k
где |
Vk , δk , Pk , Qk − |
модуль и |
фазовый |
||
угол |
комплекса |
напряжения, |
активная |
||
и |
реактивная |
мощности |
узла k; |
||
Gkm + jBkm =Ykm |
– элемент матрицы ком- |
||||
плекса |
узловых |
проводимостей; |
|||
δkm = δk −δm – разность фазовых углов между смежными узлами k и m; QКУi –
значение реактивной мощности КУ в i-м узле;
– для ЛР
Pk −Vk2Gkk −Vk ∑Vm (Gkm cos(δkm +δЛРi )+ m k
+ Bkm sin (δkm +δЛРi )) = 0,
Qk +Vk2 Bkk +Vk ∑Vm (Bkm cos(δkm +δЛРi ) − m k
−Gkm sin (δkm +δЛРi )) = 0,
где δЛРi – значение угла ЛР в i-й ветви;
• учитывать ограничения в виде неравенств, представляющие собой предельные ограничения на следующие переменные: реактивные мощности КУ или значения углов ЛР, модули и фазовые углы комплекса напряжений.
Обобщенный алгоритм для поиска оптимальных мощностей или фазовых углов (в зависимости от вида задачи) и мест установки КУ (или ЛР) в ЭС [2]. Поскольку расчетная часть не изменяется, а с помощью ЭА образуется циклический процесс, укрупненный обобщающий алгоритм выглядит следующим образом:
Шаг 1. Случайным образом в интервале допустимых значений формируется начальная популяция, представляющая собой совокупность индивидуумов, которые соответствуют возможным решениям задачи (в зависимости от вида задачи).
110
Шаг 2. Производится расчет системы нелинейных уравнений установившегося режима методом Ньютона.
После расчета системы происходит проверка ограничений, наложенных на переменные (в зависимости от вида задачи) с помощью метода штрафов.
Шаг 3. Расчет целевой функции – суммарных потерь в ЭС:
πP =
= ∑Gkm (Vk2 +Vm2 −2VkVm cos(δk −δm )).
Шаг 4. Проверка критерия остановки процесса оптимизации. Если выполнено заданное количество итераций для ЭА, то алгоритм прекращает работу и будет выбран режим, для которого целевая функция имеет наилучшее значение
ипараметры которого удовлетворяют заданным требованиям. Если заданное количество итераций не выполнено, то переходим к выполнению шага 5.
Шаг 5. С помощью ЭА формируется новая популяция, соответствующая новым возможным решениям задачи.
Далее алгоритм переходит на шаг 2
ит.д., пока не сработает критерий остановки в виде заданного количества итераций.
Рассмотрена оптимизация режимов на примере стандартной 30-узловой схе-
мы IEEE (Institute of Electric and Electronic Engineers) [6]. В представлен-
ной системе имеется шесть тепловых электростанций (ТЭС), а также 24 нагрузочные станции. Для агрегатов ТЭС известны расходные характеристики (зависимости стоимости расхода топлива от
активной мощности Pг, вырабатываемой
ТЭС) и результаты расчета режима по активной мощности, т.е. все активные мощности генераторных станций, кроме балансирующей, фиксированы.
Имеется пять КУ(ЛР) с пределами регулирования реактивной мощности от