

книги / Техническое нормирование макрошероховатости дорожных покрытий автомобильных и лесовозных дорог
..pdfгде N – объем скользящей выборки; Sn−1 – число знакочередований
в скользящей выборке; n – номер текущего цикла измерения [32]. Аналогично можно продолжить рассмотрение сочетаний знаков
идля выборки из пяти и более знаков выступов активных выступов макрошероховатости для оценки сегрегации щебня [32].
Могут быть использованы выражения для числа знакочередований
икорректирующего приращения для разных объемов (3–5) текущей выборки, разработанные В.В. Ермолаевой и А. Табыловым [32, 63]:
|
N |
n−1 |
|
|
||
Sn−1 = −0,5 + |
− 0,5 signXi* signXi*−1 , 3 ≤ N ≤ 5 , |
(2.77) |
||||
|
||||||
2 |
( |
N |
) |
|
||
i=n− |
−1 |
|
||||
где N – объем скользящей выборки; Sn−1 – число знакочередований
вскользящей выборке [32].
Вразвитие идей В.В. Ермолаевой и А.В. Чванова автором предлагается использование нового параметра – относительного числа знакочередований выступов или впадин шероховатости относительно их
средних линий (как оценки их автокорреляции). Учет инфоpмации о знакочеpедовании позволяет оценить декорреляцию – достижение требуемого качества геометрии шероховатой поверхности [32, 110].
Вполне понятно, что главным недостатком используемого ранее числа знакочередований в конкретной выборке было ограничение
вприменении объема выборки. Каждое число знакочередований использовалось для конкретного объема выборки [32].
Как указывалось ранее, основной логикой загрубленного алгоритма знакового регулирования является принятие решения об увеличении, сохранении прежним или уменьшении величины (по модулю) корректирующего переменно приращения.
Это может быть реализовано через степенную функцию, с основанием степени от 1 до 3 и показателем степени –1 до +1. Понятно, что 2
встепени 1 равняется 2, 2 в степени 0 равняется 1, а 2 в степени –1 равня-
ется 12 . Автором синтезирована формула вычисления коэффициента зна-
ковогорегулированиясучетомотносительногочислазнакочередований:
|
|
ρ0 0 ( |
|
|
|
|
f |
t) |
|
|
|
a = r |
|
|
|
= r f1 (Sотн ) , |
(2.78) |
|
X X |
|
121
где 1 < r < 3 ; a – коэффициент знакового регулирования; r – основание степени; Sотн – относительное число знакочередований по объему выборки.
Анализ эффективности применения этого показателя для конкретного объема выборки показал, что его рационально использовать для объема выборки 3 и 5.
Также проводился анализ другого числа знакочередований: Sотн = = S/Smax, где Smax – максимальное число знакочередований на данной выборке; Sотн – относительное число знакочередований по максимальному числу знакочередований. Проводилось сравнение двух способов нормирования. Значение относительного числа знакочередований по объему выборки лежит в диапазоне [0; b], где b меньше 1, а относительное число знакочередований по максимальному числу знакочередований лежит в диапазоне [0; b], где b равно 1 [32].
Понятно, что диапазон значений во втором случае боле точно и в большем диапазоне позволяет отрабатывать увеличение коэффициента знакового регулирования и, соответственно, корректирующего переменного приращения. В дальнейшем рекомендуется применять относительное число знакочередований по их максимальному значению. Формула верна для любого случая. Однако скорость увеличения управляющего параметра меньше для первого случая, чем для второго. Проведено комбинаторное моделирование различных объемов текущих выборок для их визуального представления и оценки их статистических параметров декоррелированности. Выборка представляет собой последовательность бинарных событий вида «+» «–» (0 или 1, –1 или 1). Ранее Ю.Э. Васильевым был исследован объем выборки, равный 5 [32].
2.4. Математическое моделирование вероятности возникновения дорожно-транспортных происшествий с учетом вариативности макрошероховатости покрытий
2.4.1. Особенности математического моделирования в структуре технического регулирования дорожного хозяйства
До 2002 г. в отечественном техническом нормировании действовала система стандартизации, основанная на безусловном соблюдении стандартов и (государственных, международных, отраслевых), норм
122
(ведомственных), технических условий и других нормативно-методи- ческих документов.
Начиная с начала 90-х гг. прошлого столетия (и по настоящее время) активно внедрялись различные системы менеджмента качества как составная часть административного управления предприятием. В них была заявлена оценка риска использования некондиционной продукции, на которую специалисты не обратили внимания.
В целом система менеджмента качества основана на принципе «всеобщей минимизации дисперсии». Одновременно в законодательные и нормативно-методические документы охраны окружающей среды был введен экологический менеджмент, основанный на оценке экологического риска.
Однако огромное значение процедуры риск-менеджмета приобрели после принятия Федерального закона № 184 «О техническом регулировании». В нем было заявлено об обязательности технических регламентов с учетом степени риска причинения вреда [32]. В законе декларировано об обязательном исполнении минимальных требований к безопасности объектов технического регулирования.
Налицо отход от удовлетворения потребностей собственника объекта (государства, ведомства, монополии) по интегральным (обобщенным) показателям надежности, например, срока службы или наработки на отказ к удовлетворению потребности в безопасности конкретного потребителя.
При этом нормирование ведется по установленным и проранжированным факторам опасности риска. Верен тезис «Риск испытывать нельзя», риск надо оценивать (исследовать). Риск нельзя испытывать на отказ.
К результатам применения новой системы технического регулирования можно отнести понятия наведенной однородности, минимизации коэффициента вариации, соответствия требуемому уровню ответственности и укороченных и утолщенных хвостов распределений, декоррелированнности выходного параметра. Важным результатом оказалось
исокращение затрат (на один, иногда до трех порядков) на получение
ианализ требуемой информации для принятия решения о сравнении проектов конкретных объектов технического регулирования.
Известна следующая классификация рисков: технический (обусловленный возможными последствиями функционирования технико-
123

экономических систем, а также их нарушениями), экологический, индивидуальный, социальный, политический, экономический [66]. Однако при исследовании рисков следует рассматривать также и их взаимосвязь, выраженную в возможном совместном формировании. В области дорожного хозяйства используем следующую интерпретацию ТР или вероятность аварийной ситуации:
r |
= |
Тп |
, |
(2.79) |
тех |
|
То |
|
|
где Tп – число аварийных ситуаций на техническом объекте дорожной инфраструктуры за период времени t; Tо – общее число ситуаций на
техническом объекте транспортной инфраструктуры [68].
При исследовании ТР в дорожном хозяйстве можно выделить типовые признаки основных процедур его оценки, такие как объект ТР,
причины (источник) возникновения ТР, сопровождающие факторы ТР, последствия ТР.
Вопросы исследования ТР и его оценки представлены в работах
[18, 23, 31, 44, 62, 63, 66, 68, 73, 82, 84, 109, 111, 115, 123, 138,]. Вопросы кон-
цепции безопасности представлены в ГОСТ Р 51898–2002 [71]. Величина допустимого ТР достигается с помощью итеративного процесса оценки и снижения ТР (рис. 2.10).
Рис. 2.10. Схема итеративного процесса оценки ТР и уменьшения ТР
124

Физически под риском можно понимать площадь хвоста нормального распределения, находящуюся в границах между критическим значением и тремя сигмами.
Предложена типовая процедура оценки и снижения вероятности возникновения опасности (рис. 2.11) с учетом методов оценки опасностей и объема полученной информации о них [83, 107].
Первый случай |
|
|
Для систем, |
функционирующих |
безопасно (нормально) при |
Аср >> Акр, где |
Аср – фактическое |
среднее значение переменной; |
Акр – значение критической переменной.
Устанавливают значение критической переменной Акр ожидания, соответствующее вероятности возникновения нежелательного события, равной 50 %.
Алгоритм оценки надежности (степени ТР) (рис. 2.12) [31].
1) Методами математической статистики определяется необходимое число измерений параметра А:
|
( A |
− A |
)2 t2 |
|
|
n = |
max |
min |
|
, |
(2.80) |
(6 )2 |
|
||||
|
|
|
|
||
Здесь Аmax и Аmin – максимальная и минимальная величины параметра исследования; t – коэффициент значимости, который определяется по
95% доверительной вероятности (t = 1,96 ≈ 2); |
– допускаемое откло- |
||
нение средней величины макрошероховатости ( |
= 2мм). |
||
2) Устанавливается фактическое среднее значение Аср: |
|||
|
n |
|
|
A = |
Ai |
(2.81) |
|
1 |
. |
||
|
|||
cp |
n |
|
|
|
|
||
3) Устанавливается среднее квадратическое отклонение фактического среднего значения Аср:
n (Ai − Aср )2
σA = |
1 |
. |
(2.82) |
|
|
|
ср |
n −1 |
|
125
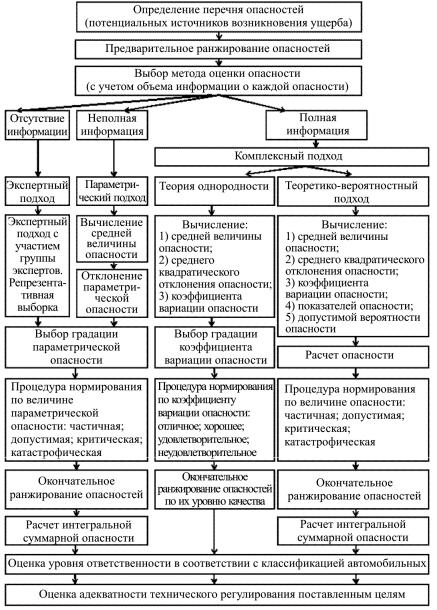
Рис. 2.11. Типовая процедура оценки и снижения вероятности возникновения опасности
4) Устанавливается коэффициент вариации фактического среднего значения Аср [50]:
A |
σA |
|
|
С cp = |
cp |
. |
(2.83) |
|
|||
V |
Acp |
|
|
|
|
||
126

5) Устанавливается значение критической переменной Акр:
– при CVАср ≠ 0,2:
|
А2 |
+ |
25(САкр )2 |
− 1 |
(А2 |
− 25σ2 |
) − А |
|
|
|
||||
Акр = |
доп |
|
|
V |
|
|
доп |
|
Адоп |
доп |
, |
(2.84) |
||
|
|
|
|
25(САкр )2 −1 |
|
|
|
|||||||
|
|
|
|
|
|
|
V |
|
|
|
|
|
|
|
– при C Аср =0,2: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
А2 |
|
− 25σ2 |
|
|
|
|
|
|
|
|
|
|
А |
= |
доп |
|
Адоп |
|
, |
|
|
(2.85) |
||
|
|
|
|
|
|
|
|
|
||||||
|
|
|
кр |
|
|
|
2Адоп |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где Адоп – допустимое (безопасное) |
значение переменной А; |
σ А |
– |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
доп |
|
строительный допуск на среднее квадратическое отклонение параметра Адоп; CVАкр – принимается равным параметру CVАср согласно закону распределения критической переменной Акр и обладает эквивалентной од-
нородностью по законам распределения фактической переменной Аср. 6) Параметр σ Адоп определяется по формуле
σ |
А |
= C Адоп А , |
(2.86) |
|
|
V |
доп |
|
|
|
доп |
|
|
|
где СVАдоп – допустимое значение коэффициента вариации парамет-
ра Адоп, которое во многих случаях не превышает 0,05. 7) Параметр σ АКР определяется по формуле
σ |
А |
= САкр А . |
(2.87) |
|
|
V |
кр |
|
|
|
кр |
|
|
|
8) Вероятность возникновения нежелательного события (например, увеличение числа дорожно-транспортных происшествий) устанавливается по формуле
|
|
А |
− А |
|
|
|
r = 0,5 |
− Ф |
ср |
кр |
. |
(2.88) |
|
σ2 |
+ σ2 |
|||||
|
|
|
|
|||
|
|
Аср |
Акр |
|
||
При анализе формулы установлено, что при принятии параметра А равным параметру Акр ТР нежелательного события составит 50 %, т.е.
127

r = 0,5. Если А> Акр , то r < 0,5, а в пределе А>> Акр риск стремится к 0. При А< Акр r > 0,5 будет, а в пределе А<< Акр ТРстремитсякединице.
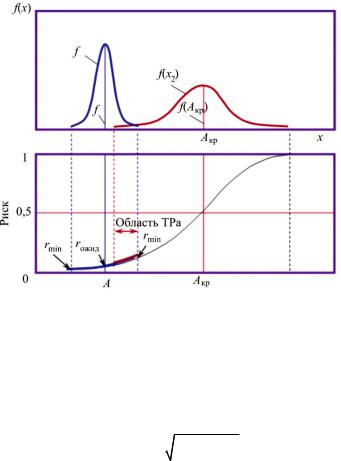
Физически под риском можно понимать площадь хвоста нормального распределения, находящуюся в границах между критическим значением и тремя сигмами (рис. 2.12).
f (х)
f (х1)
f (х2)
f (Акр) |
f (А) |
Риск
1
0,5
0
Акр |
А |
х |
Область ТРа
rожид
rmax 
 rmin
rmin
Акр А
Рис. 2.12. Плотность распределения параметра А и параметра Акр с представлением области ТР
Второй случай Для систем, функционирующих безопасно (нормально) при
Аср<< Акр: Аср – фактическое среднее значение переменной; Акр – среднее значение, соответствующее риску возникновения нежелательного события, равное 50 %.
Алгоритм оценки надежности (степени риска) (рис. 2.13) [31]: 1) Определяется необходимое число измерений параметра А:
|
( A |
− A |
)2 t2 |
|
|
n = |
max |
min |
|
, |
(2.89) |
(6 )2 |
|
||||
|
|
|
|
||
128

где Аmax и Аmin – максимальная и минимальная величины исследуемого
параметра; t – коэффициент значимости, который определяется по 95 % доверительной вероятности (t = 1,96 ≈ 2); – допускаемое отклонение.
2) Устанавливается фактическое среднее значение Аср:
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ai |
. |
|
|
|
|
|
|
(2.90) |
|||||
|
|
|
|
Аср = |
1 |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
||
3) Устанавливается среднее квадратическое отклонение фактиче- |
|||||||||||||||||||||
ского среднего значения Аср: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
σA |
= |
|
(Ai − Acp )2 |
|
|
|
(2.91) |
|||||||||||||
|
1 |
|
|
|
|
|
|
|
|
. |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
cp |
|
|
|
|
|
|
|
n −1 |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4) Устанавливается коэффициент вариации фактического среднего |
|||||||||||||||||||||
значения Аср: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
|
|
σA |
|
|
|
|
|
|
|
|
||||
|
|
|
|
C cp |
= |
|
|
|
cp |
. |
|
|
|
|
|
|
(2.92) |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
V |
|
|
|
|
Acp |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
5) Устанавливается значение критической переменной Акр : |
|
||||||||||||||||||||
– при C Аcp ≠ 0,2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
А2 |
+ |
25(САкр )2 −1 (А2 |
− 25σ2 |
) − А |
|
|
||||||||||||||
Акр = 2Адоп − |
доп |
|
|
|
|
V |
|
|
|
|
|
|
|
доп |
Адоп |
доп |
, |
(2.93) |
|||
|
|
|
|
|
|
|
25(С |
Акр )2 |
−1 |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
V |
|
|
|
|
|
|
|
||
– при C Аcp = 0,2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
А2 |
|
− 25σ2 |
|
|
|
|
||||||||
|
А |
|
= |
2А |
|
|
доп |
|
|
|
Адоп |
, |
|
|
(2.94) |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
кр |
|
|
доп |
|
|
|
|
|
2Адоп |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
где Адоп – допустимое (безопасное) значение переменной А; σ А |
– до- |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
доп |
|
пуск или допустимый стандарт отклонения нормированной или безопасной величины на среднее квадратическое отклонение параметра
Адоп; CVАкр – принимается равным параметру CVАср согласно закону распределения критической переменной ( Акр ) и обладает эквивалентной
129
однородностью по |
законам |
распределения фактической |
перемен- |
||
ной (Аср). |
|
|
|
|
|
6) Параметр σ А |
определяется по формуле |
|
|||
доп |
|
|
|
|
|
|
σ |
А |
= САдоп А , |
(2.95) |
|
|
|
V |
доп |
|
|
|
|
доп |
|
|
|
где СVАдоп – допустимое значение коэффициента вариации параметра
Адоп, которое во многих случаях не превышает 0,05. 7) Параметр σАкр определяется по формуле
σ |
А |
= САкр А . |
(2.96) |
|
|
V |
кр |
|
|
|
кр |
|
|
|
Рис. 2.13. Плотность распределения параметра А
ипараметра Акр с представлением области ТР
8)Вероятность возникновения нежелательного события устанавливается по формуле
|
А |
− А |
|
|
|
r = 0,5 − Ф |
кр |
ср |
. |
(2.97) |
|
σ2 |
+ σ2 |
||||
|
|
|
|||
|
Акр |
Аср |
|
||
При анализе формулы определено, что при принятии равенства параметра А и параметра Акр ТР нежелательного события составит 50 %.
130