

книги / Физика
..pdfЛЕКЦИЯ 3. ДИНАМИКА ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ
Момент импульса частицы относительно некой точки (полюса) – вектор, равный векторному произведению радиусвектора точки на импульс точки (рис. 1.10):
|
|
|
|
|
|
|
|
r p p r , |
|
|
|
r |
|
p |
|
l |
|
где |
|
|
|
sin . |
|
|||
l |
|
|
|
|
||||
lz |
rp rmv rm r Iz , где z – компонента вектора |
|||||||
момента импульса частицы при вращении вокруг оси z. Размерность момента импульса L кг м2 /с.
Рис. 1.10. Вектор момента импульса направлен перпендикулярно радиус-вектору и вектору импульса
Момент инерции материальной точки относительно оси z
вращения равен массе точки, умноженной на квадрат расстояния её до оси вращения:
Jz mr2.
Размерность момента инерции J кг м2.
Момент инерции цилиндра Jz 12MR2.
Момент инерции сплошного шара J 52MR2.
Момент силы – вектор, равный векторному произведению радиус-вектора, проведённого из точки О в точку приложения силы на вектор силы:
21
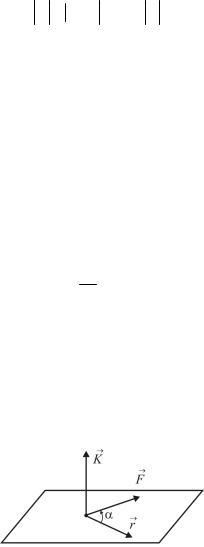
Момент силы относительно оси z равен произведению силы F на плечо h:
K r 
 F sin F h.
F sin F h.
Размерность момента силы K м Н.
Абсолютно твёрдое тело – система материальных точек, расстояние между которыми неизменно. Твёрдое тело выступает при движении как единое целое.
Всякое твёрдое тело представляет собой систему с 6 степенями свободы: 3 поступательные степени свободы при перемещении вдоль трёх осей и 3 вращательных степени свободы вращения вокруг трёх осей.
Основной закон динамики вращательного движения
(рис. 1.11).
Производная по времени от момента импульса механической системы относительно центра инерции системы равна мо-
менту всех сил, приложенных к механической системе
dL K. dt
Доказательство |
|
|
|
|
|
|
|
|
|
|
|||||
|
dL |
|
d |
|
|
dr |
|
|
|
dp |
|
|
|
|
|
|
|
|
|
[r |
p] |
|
p r |
|
|
r |
F |
K, |
|
||
|
dt |
dt |
dt |
dt |
|
||||||||||
|
|
|
|
|
v p mv , v v 0. |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
0, |
|
|
|
Условие равновесия твёрдого тела: F |
K 0, |
0. |
|||||||||||||
Рис. 1.11. Основной закон динамики вращательного движения
22
Пример. Вращение системы вокруг неподвижной оси z в плоскости xy:
ddLtz Kz ,
где Lz Jz .
Если система является абсолютно твёрдым телом, тогда все точки тела движутся с одинаковыми скоростями и
Jz ddtz Jz Kz .
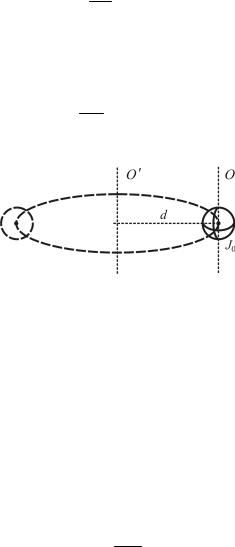
Теорема Штейнера (рис. 1.12).
Рис. 1.12. Вращение тела вокруг произвольной оси O . Ось О проходит через центр инерции, d – расстояние между осями
Момент инерции тела относительно произвольной оси вращения O равен сумме момента инерции этого тела относительно оси O, проходящей через центр инерции, и произведению массытела наквадратрасстоянияd междуосями (см. рис. 1.12).
J J0 Md 2. |
(1.5) |
Доказательство.
Кинетическая энергия тела, вращающегося относительно оси O ,
T J 2 2 .
23

Движение относительно оси O есть поступательное движение центра инерции тела со скоростью V d и вращатель-
ное движение со скоростью |
вокруг оси, |
проходящей через |
||||||||||||
центр инерции: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
MV 2 |
|
J |
2 |
|
|
Md 2 2 |
|
J |
2 |
|
J 2 |
, |
|
|
0 |
|
|
|
0 |
|
|
|
||||||
2 |
2 |
2 |
2 |
|
2 |
|||||||||
|
|
|
|
|
|
|
||||||||
где V d, см. (1.5).
Гироскоп
Гироскоп – симметричное твёрдое тело, быстро вращающееся относительно неподвижной точки О, ось вращения которого может изменять свое направление в пространстве.
Твёрдое тело с произвольным распределением масс имеет три взаимно перпендикулярные оси, которые называются главными осями инерции. Они проходят через центр инерции и жёстко связаны с телом.
Свободное вращение гироскопа. При свободном вращении твёрдого тела на него не действуют внешние силы.
ddLt K 0 L const.
Сохраняется момент импульса, его величина и направление в пространстве.
Сохраняется кинетическая энергия:
T 12 L const.
Для шарового волчка моменты инерции по трем осям одинаковы: Jx J y Jz J ,
|
|
|
|
|
L |
J |
const const, |
L |
. |
24

Для |
симметричного волчка Jx J y Jz |
сохраняется |
z const, |
|
|
2 const, угол между векторами L |
const. |
Картина свободного вращения симметричного гироскопа
(рис. 1.13).
Рис. 1.13. Прецессия свободного гироскопа
1. Волчок быстро равномерно вращается вокруг своей оси. 2. Эта ось медленно равномерно вращается вокруг направ-
ления момента импульса L, описывая вокруг него круговой ко-
нус. Такое вращение называется регулярной прецессией волчка.
3. Вектор угловой скорости вращения , оставаясь постоянным по величине, также равномерно вращается вокруг на-
правления L с угловой скоростью пр.
Угловая скорость вращения волчка вокруг своей оси z есть
проекция z |
Lz |
|
L |
cos . |
Jz |
|
|||
|
|
Jz |
||
Частота регулярной прецессии свободного симметриче-
ского волчка
пр L .
Jx
25

Гироскоп под действием внешних сил (рис. 1.14).
В простейшем случае гироскоп – симметричный волчок с закрепленной точкой С на оси вращения волчка. Он имеет три степени свободы. Сила тяжести приложена в центре инерции О. Она стремится опустить центр инерции вниз. Однако ось поворачивается в направлении, перпендикулярном вертикальному
направлению. Если скорость собственного вращения волчка 0
велика, то ось вращения совершает медленное вращение, описывая конус вокруг направления силы тяжести.
Рис. 1.14. Прецессия гироскопа в поле силы тяжести
Положим, что кинетическая энергия собственного вращения волчка много больше потенциальной энергии волчка в поле силы тяжести. Энергию гироскопа можно записать в виде
E T U |
J |
2 |
Mgl cos const. |
|
z |
0 |
|||
2 |
||||
|
|
|||
Угловая скорость вынужденной прецессии много меньше собственной частоты вращения 0. Момент импульса волчка практически не меняет своей величины. Он только прецессирует вместе с осью волчка с угловой скоростью .
Скорость изменения момента импульса волчка с учётом влияния силы тяжести
26
ddLt L0,
с другой стороны, dL K, тогда момент силы тяжести dt
K L0.
Модуль момента силы тяжести направлен перпендикулярно плоскости, проходящей через ось волчка, и вертикальное направление силы тяжести
K Mgl sin .
Вектор K Ml g n , где n LL0 – нормальный вектор,
L0 Ml g LL0 .
Вектор угловой прецессии получаем в виде
Ml g.
L0
Модуль угловой прецессии гироскопа в поле силы тяжести
|
Mgl |
. |
(1.6) |
|
|||
|
Jz 0 |
|
|
Формулу (1.6) можно получить сразу из отношения частот. Отношение частоты прецессии к собственной частоте вращения гироскопа пропорционально отношению потенциальной энергии U гироскопа в поле силы тяжести к кинетической энергии T вращения гироскопа:
U Mgl 1.
0 T Jz 02
2
27

Применение гироскопов. Основное физическое свойство гироскопов: сохранение направления оси вращения гироскопа. Гироскопы делятся на силовые (для стабилизации) и индикаторные – для определения углов рысканья, например искусственных спутников Земли.
Масса гироскопов – от 10 до 10 кг. Скорость вращения – до 60 000 об/мин.
Гироскопические устройства состоят из трёх гироскопов и вспомогательных приспособлений для корректировки направления оси гироскопа в пространстве или измерения углов её отклонения.
Эти устройства применяются в авиации, морском флоте, ракетной и космической технике для решения навигационных задач, управления подвижными объектами, их стабилизации. В народном хозяйстве это прокладка стволов, штолен, бурение скважин, строительство метрополитенов.
Примеры гироскопов: Земля, артиллерийский снаряд, пуля автомата.
ЛЕКЦИЯ 4.ЭНЕРГИЯ
Энергия – единая мера различных форм движения. Энергия – скалярная величина.
Кинетическая энергия поступательного движения частицы равна половине произведения массы тела на квадрат скорости движения частицы:
mv2
Wk 2 .
Размерность энергии W кг 2м2 1Дж.
с
Кинетическая энергия вращательного движения тела вокруг оси равна половине произведения момента инерции тела относительно оси вращения на квадрат угловой скорости:
Wk T J22 .
28

Теорема Кёнига:
Кинетическая энергия системы материальных точек равна кинетической энергии поступательного движения самого центра инерции системы плюс кинетическая энергия системы относительно её центра инерции:
|
|
|
2 |
k |
mivi |
2 |
|
|
|
Wk |
MVc |
|
|
, |
|
|
|
2 |
2 |
|
|||
|
|
|
i 1 |
|
|
||
|
|
|
|
|
|||
где v vi Vc . |
|
|
|
|
|
||
Пример:качениешарапоплоскостисоскоростью v (рис.1.15):
Рис. 1.15. Шар катится по плоскости без проскальзывания
Полная кинетическая энергия равна кинетической энергии поступательного движения центра масс шара плюс кинетическая энергия вращательного движения шара вокруг оси, проходящей через центр шара:
mv2 J 2
Wk 2 2 .
Потенциальная энергия U – энергия механической системы, зависящая от конфигурации системы, т.е. от взаимного расположения частиц системы и их положения во внешнем силовом поле. U 0 – отталкивание частиц. U 0 – притяжение частиц.
Консервативные силы зависят только от координат частиц системы:
F U U gradU.r
Диссипативные силы (например, силы трения) зависят от координат и скоростей частиц системы.
29

Пример 1. Сила упругости F kx – консервативная. Потенциальная энергия упругого тела
U x 0x Fdx k 0x xdx kx22 .
Потенциальная энергия тела массой m в гравитационном поле массы M.
Пример 2. Сила тяготения двух тел F G |
|
|
mM |
. |
|
|
|
|||||||
N |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
r2 |
|
|
|
||||
Потенциальная энергия тела массой m в гравитационном |
||||||||||||||
поле массы M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U r |
F r dr GN mM |
|
dr |
GN mM |
|
|
1 |
|
1 |
|
, |
|||
|
|
r |
||||||||||||
|
r |
r r2 |
|
|
|
|
|
|
||||||
U r GN mMr .
Потенциальная энергия в однородном поле
U Fr mgzC .
Однородное поле – поле, в котором на частицу действует одна и та же сила в различных точках пространства. Например,
для силы тяжести F mg напряжённость гравитационного поля Земли на её поверхности (ускорение свободного падения)
g G |
|
M |
e . |
|
|
||
|
N |
R r |
|
Работа – изменение энергии макроскопического тела путём силового воздействия на него. Элементарная работа силы, совершаемая при перемещении частицы под действием силы, равна скалярному произведению вектора силы на вектор перемещения:
A F dr F ds cos .
30