

книги / Моделирование электротехнических систем и систем автоматики
..pdfЗапуск серийного или массового производства изделия на-
чинается только тогда, когда технология его производства доведена до полной готовности, при которой технические параметры всех изделий всегда соответствуют техническим требованиям.
Этап массового или серийного производства изделия завершается только тогда, когда будет полностью отработана технология производства нового более совершенного изделия или когда запускается в производство серия другого изделия с уже отработанной технологией.
На этапе массового производства предприятие-изгото- витель может производить некоторые изменения в конструкции изделия, связанные с его усовершенствованием или с устранением недостатков, выявленных при эксплуатации этого изделия.
На стадии потребления предприятие-изготовитель собирает и обобщает информацию о характере эксплуатации выпускаемых изделий. Эта информация собирается в форме жалоб потребителей (рекламаций) на качество выпускаемых изделий. Сортировка и обработка этих рекламаций позволяет предприятию выявить наиболее характерные дефекты выпускаемых изделий. Силами конструкторско-технологического персонала предприятия вносятся конструктивные или технологические изменения в процесс изготовления изделия с целью устранения недостатков изделия, выявленных в процессе его эксплуатации.
На стадии утилизации разрабатываются мероприятия по минимальному экологическому воздействию на природу отработанных изделий в результате их захоронения или эффективной их переработке в исходные материалы для других изделий.
11
3. РОЛЬ МОДЕЛИРОВАНИЯ В ПРОЦЕССЕ СОЗДАНИЯ И СОВЕРШЕНСТВОВАНИЯ СИСТЕМ АВТОМАТИКИ
На этапе поисковых научных исследований происходит научное обоснование технических требований к будущему техническому объекту (изделию). Достоверность этих требований значительно возрастает в том случае, если удается предварительно смоделировать рабочий процесс нового технического объекта. Поэтому составной частью научного поиска технических требований к новому техническому объекту является процесс моделирования его рабочих режимов при различных условиях его работы. При этом могут быть использованы различные виды этого моделирования.
Таким образом, рабочие процессы в существующих и проектируемых системах автоматики можно эффективно исследовать с помощью моделей, реализуемых, как правило, на современных ЭВМ, которые в этом случае выступают в качестве инструментального средства исследования характеристик этих систем. Если результаты моделирования совпадают с практическими параметрами проектируемых систем, то разработанная модель такой системы считается адекватной.
При моделировании электротехнических систем и систем автоматики используются модели двух типов:
•модели аналитического типа;
•модели имитационного типа.
Модели аналитического типа предназначены только для исследования характеристик технических объектов. Такой тип модели используют чаще всего на этапе проектирования технических объектов, в том числе и систем автоматики. По принципу работы такие модели могут быть как физического, так и математического вида. Модели аналитического типа чаще представлены в форме компьютерных математических моделей, для реали-
12
зации которых используют программные пакеты, написанные на языках высокого уровня (Паскаль, Бейсик или Си) с применением операторов машинной графики.
Модели имитационного типа чаще применяются как тренажеры для обучения или тренировки обслуживающего или рабочего персонала технологического оборудования. Использование тренажеров в процессе подготовки рабочего персонала значительно снижает трудоемкость и стоимость этого процесса, а также повышает его эффективность.
Имитационные модели имеют более сложную принципиальную и алгоритмическую структуру по сравнению с аналитическими моделями. Кроме того, для их реализации требуются ЭВМ с повышенным быстродействием и большим объемом оперативной памяти, а также более развитое математическое обеспечение. Такие модели также требуют наличия диалоговых систем и более совершенных периферийных устройств и развитой базы исходных данных.
Модели технических объектов предназначены для следующих целей:
•познание неизвестных процессов и явлений;
•предсказание поведения технических объектов и определение характеристик на стадии их конструирования;
•обучение обслуживающего персонала приемам управления работой технических устройств.
Моделирование можно представить как последовательность следующих последовательных этапов:
– выбор объекта (оригинала) и цели моделирования;
– разработка критериев соответствия между моделью и оригиналом;
– создание модели;
– проверка соответствия модели и оригинала;
– использование модели для исследования свойств оригинала.
13

4. КЛАССИФИКАЦИЯ МОДЕЛЕЙ
МОДЕЛЬ это реальный объект, свойства которого полностью или частично совпадают с другим объектом, называемым ОРИГИНАЛОМ.
Рис. 1. Структура классификации моделей
Модели электротехнических систем и систем автоматики (рис. 1) могут быть составлены в следующих видах:
•в форме физической модели;
•в форме математической модели.
Физическая модель – это уменьшенная (или увеличенная) копия моделируемого объекта (оригинала), выполненная по определенным принципам. Принципы, по которым строятся физические модели, включают в себя подобие и масштабность модели по отношению к оригиналу
Физическое моделирование может протекать в реальном и нереальном (виртуальном) масштабах времени, а также может рассматриваться без учета этого параметра. Чаще всего физическое моделирование выполняется в реальном масштабе времени.
Некоторые исследуемые процессы настолько быстротеч-
ны, что зафиксировать их результат в реальном масштабе времени не представляется возможным. В этом случае меняют масштаб времени, в результате процесс становится виртуаль-
ным. Например: многие высокочастотные процессы в электро-
14
нике можно зафиксировать только с помощью осциллографа с увеличенным масштабом развертки по времени. В натурном физическом эксперименте скоротечные процессы часто фиксируют с помощью высокоскоростной киносъемки.
Математическая модель – это комплекс уравнений, описывающих поведение технического объекта (оригинала). По виду математические модели делятся на аналоговые и компьютерные (цифровые).
Аналоговые математические модели представляют собой некоторые физические устройства, работающие по принципам, описанным уравнениями процессов, которые они моделируют.
Компьютерные (цифровые) математические модели пред-
ставляют собой счетно-решающие устройства (вычислители), с помощью которых определяется результат решения уравнения математической модели.
Компьютерные математические модели делятся: на статические и динамические.
•К статическим относятся такие модели, структура которыхне изменяется во времени или действие этих моделей ограничено таким отрезком времени, на котором как структура, так
икомпоненты такой модели практически не меняются. Примером статической модели является модель водопроводной сети или сетиотопления жилого дома в номинальном (расчетном) режиме работы.
•К динамическим моделям относятся такие модели, которые имеют многоуровневую структуру, подвергающуюся изменениям во времени. Компоненты такой модели также могут изменяться во времени как по величине, так и по их взаимосвязям. Параметры динамических моделей в своем составе могут содержать как непрерывные во времени компоненты, так и компоненты дискретного типа. Эта особенность разделяет между собой динамические модели. Модели, содержащие в своем составе
как непрерывные, так и дискретные компоненты, относятся к моделям непрерывно-дискретного типа.
15
Основные задачи и требования к оптимальности моделей динамического типа
Для постановки результативного компьютерного эксперимента с динамической моделью нужно предварительно решить следующие задачи:
•преобразовать уравнения математической модели и ее компонентов в форму возможного их численного решения;
•синтезировать из отдельных компонентов нескольких математических моделей общую динамическую модель;
•правильно определить момент, когда непрерывность про-
цесса функционирования модели переходит в дискретность с соответствующей коррекцией искомого результата.
Динамические модели считаются оптимальными, если они созданы в соответствии со следующими критериями:
–отражение в модели структурных связей элементов технического объекта;
–отражение в модели функционального взаимодействия элементов технического объекта;
–отражение в модели характера взаимодействия элементов технического объекта с внешней средой;
–единство совокупности задач, решаемых каждым компонентом модели;
–интегрированное взаимодействие всех подсистем модели
вобщем алгоритме их функционирования;
–выбор оптимальной структуры модели и алгоритмов ее поведения;
–максимальная эффективность модели;
–адаптивность модели к внешним возмущающим факторам;
–управляемость модели со стороны пользователя;
–возможность совершенствования существующего варианта модели.
16
PNRPU
5.МЕТОДЫ МОДЕЛИРОВАНИЯ РАБОЧИХ ПРОЦЕССОВ СИСТЕМ АВТОМАТИКИ
5.1. Физическое моделирование рабочих процессов технических объектов
Физическая модель – это уменьшенная (или увеличенная) копия моделируемого объекта (оригинала), выполненная по определенным принципам. Принципы, по которым строятся физические модели, включают в себя подобие и масштабность.
Масштабом физической модели называют отношение ее линейных размеров к линейным размерам оригинала. Если масштаб больше единицы, то физическая модель уменьшенная копия оригинала и наоборот. Примером физических моделей могут быть уменьшенные копии самолетов, автомобилей, плотин гидростанций и т.д.
Подобием физической модели называют пропорциональ-
ность физических свойств модели и оригинала. Это значит, что
прочностные, нагрузочные и другие параметры физической модели должны быть выполнены в определенном пропорциональном соотношении к таким же параметрам оригинала. Нару-
шение принципа подобия искажает результат моделирования. Например, если физическая модель шахтной выработки (уменьшенная копия штрека) будет сделана из того же материала (прочного песчаника) и к ней будут приложены даже те же нагрузки (что маловероятно), то достоверность результата моделирования устойчивости этого штрека к внешним нагрузкам будет сильно нарушена, так как размеры этой модели будут значительно искажать конечный результат.
5.2. Математическое моделирование рабочих процессов технических объектов
Математической моделью называют комплекс уравнений, описывающих поведение технического оригинала. Способ вы-
17
числения результата таких моделей делит этот вид моделей на аналоговые и компьютерные (цифровые).
5.2.1. Аналоговые математические модели
Аналоговые математические модели представляют собой некоторые физические устройства, работающие по принципам, описанным математическими уравнениями, на основании которых работают их оригиналы. Различные физические процессы могут быть описаны уравнениями одного типа (аналогичными уравнениями). Поэтому для моделирования одного из этих процессов может быть выбран другой физический процесс, описанный аналогичным по типу математическим уравнением. В этом случае этот процесс считается аналоговой моделью другого аналогичного процесса.
Например:
i = |
1 du . |
(1) |
|
ρ dx |
|
q =λ dT . |
(2) |
|
|
dx |
|
Если уравнением (1) описывается процесс протекания электрического тока по проводнику, а уравнением (2) описан процесс передачи теплового потока через некоторую сплошную среду с коэффициентом теплопроводности λ, то оба этих процесса можно считать аналогичными, так как они описаны аналогичными то типу уравнениями. Поэтому один из этих процессов может быть аналоговой моделью другого. В этом случае за аналоговую модель принимается тот физический процесс, который проще в реализации.
Аналоговые математические модели могут быть:
•моделями прямой аналогии (прямые аналоговые модели);
•модели не прямой аналогии (не прямые аналоговые модели).
18
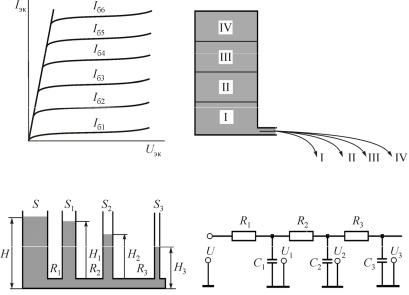
Аналоговые модели, реализованные через определенный физический процесс, принято считать прямыми аналоговыми моделями. Примеры прямых аналоговых моделей показаны на рис. 2.
а |
б |
в |
г |
Рис. 2. Разновидности прямых аналоговых моделей
График, представленный на рис. 2, а является нагрузочной характеристикой транзистора, которая может быть смоделирована процессом слива жидкости разного уровня через отверстие на дне сосуда (рис. 2, б). Аналогия этих двух процессов наблюдается в скачкообразной идентичности характера проявления выходных сигналов. Если в транзисторе каждый скачок тока «эмитер-коллектор» проявляется при очередном броске тока «базы», то в прямой аналоговой модели этого процесса при увеличении напора жидкости ступенчато возрастает длина выброса струи жидкости из сливного отверстия, имитирующая силу тока.
19
Аналогия двух других процессов рис. 2, в и г проявляется в том, что в первом процессе сопротивление трубы Ri определяет напор жидкости Hi на каждом участке трубопровода. Аналогично во втором процессе сопротивление Ri токовой цепи определяет уровень напряжения Ui в ее последовательных точках.
Рассмотрим принципы построения аналоговых моделей на примерах моделирования некоторых математических процессов:
•суммирование исходных параметров;
•интегрирование исходных параметров.
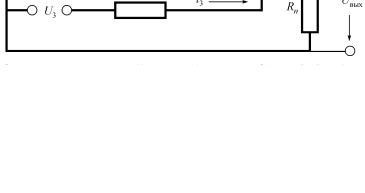
Принцип построения модели суммирования нескольких исходных параметров рассмотрим на примере сложения нескольких токовых величин, подходящих к общему узлу. Расчетная схема такой модели представлена на рис. 3. Для этой модели необходимо определить суммарное значение тока in, выходящего из узла, к которому стекаются несколько входящих токов.
Рис. 3. Схема прямой математической модели сложения исходных параметров
По закону Кирхгоффа значение тока, выходящего из узла, вычисляется так:
in = i1 + i2 + i3. |
(3) |
20