

книги / Машины для уплотнения твердых бытовых отходов. Технология использования, конструкция и расчет
.pdfα0
h
Рj
hц
Gк
α
lc
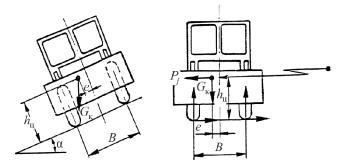
Рис. 55. Схема для определения устойчивости компактора в рабочем процессе
Рj
 х
х
|
hц |
|
α |
n |
|
si |
|
Gк |
G |
|
к |
|
c |
|
o |
|
s |
|
α |
Gк  α
α
О Рт.р lц 
L
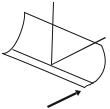
Рис. 56. Схема для определения продольной устойчивости компактора
Придвижениипереднимходомподуклон(рис. 56) содновременным торможениемвозможенотрывзаднейчастидвижителякомпактораотопорной поверхности. Опрокидывание происходит относительно точки О. В худшемслучаесилавзаимодействиядвижителясопорнойповерхностью, Н,
Рт.р = с Gк cos .
101
Здесь с – коэффициент сцепления движителя с опорной поверхностью. Из условия Рх = 0
Рj = Gк ( с cos – sin ),
где Pj – сила инерции, прикладываемая к центру тяжести машины, Н. Опрокидывание компактора возможно, если
lц Gк cos = (Рj + Gк sin )/hц.
Отсюда получаем
lц = с hц.
Здесь lц, hц – координаты центра тяжести машины относительно точки О, м (см. рис. 56).
Из последнего равенства вытекает, что в ходе hц торможения при lц > сhц опрокидывание компактора вперед невозможно. Но возможно его сползание по наклонной поверхности, когда
lц/hц = tg = с.
С учетом коэффициента запаса устойчивости, равного 1,2, для машины с колесным движителем со всеми тормозными колесами предельный угол уклона по сцеплению находится из выражения
tg y = с/1,2.
Для колесных машин с передними тормозными колесами
tg y = |
1 сL lц |
( с f ) |
, |
||||
|
|
|
|
|
|||
1,2 L ( |
с |
f )h |
|||||
|
|
||||||
|
|
|
|
ц |
|
||
(24)
(25)
где L – база машины; f – коэффициент сопротивления передвижению. Если только задние колеса тормозные, то
tg y = |
1 lц ( с f ) fL |
. |
(26) |
|||||
|
|
|
|
|
||||
1,2 L ( |
с |
f )h |
||||||
|
|
|
||||||
|
|
|
|
ц |
|
|
||
Когда lц < с hц, возможно опрокидывание компактора относительно точки O (см. рис. 56). В этом случае предельный угол уклона определяется равенством
tg y = lц/(1,2hц). |
(27) |
102

При движении компактора на подъем возможно его опрокидывание относительно задних опор или сползание юзом назад. Помимо указанного, следует учитывать, что угол подъема ограничивается запасом мощности силовой установки. Предельный угол подъема по условию опрокидывания компактора при его движении передним ходом вычисляется с помощью соотношения
tg п = |
L lц |
. |
(28) |
|
|||
|
1,2h |
|
|
|
ц |
|
|
Подъемы, преодолеваемые компактором по условию сцепления движителя, определяются видом ходового оборудования:
если оно колесное со всеми ведущими колесами,
tg п = с – f; |
|
(29) |
||
если оборудование колесное с передней ведущей осью, |
|
|||
tg п = |
(L lц ) fL |
; |
(30) |
|
L сhц |
||||
|
|
|
||
если оно колесное с задней ведущей осью,
tg п = |
сlц fL |
. |
(31) |
|
|||
|
L h |
|
|
|
с ц |
|
|
Предельный угол подъема, преодолеваемого компактором при 100%-ном использовании мощности двигателя, находится из уравнения тягового баланса
N /v = Gк sin + f Gкcos ,
где N – мощность двигателя, Вт; – КПД трансмиссии и ходового оборудования тягача; Gк – сила тяжести компактора, Н; v – скорость движения компактора, м/с.
Приняв, что 1 + f 2 |
1 f 2 , получим формулу |
|
||
sin п = |
N |
f . |
(32) |
|
G v(1 f 2 ) |
||||
|
|
к |
|
|
103
Поперечная устойчивость компактора (рис. 57) оценивается по условиям опрокидывания на наклонной поверхности либо при движении на закругленных участках дорог, а также исходя из потери сцепления движителя с дорогой.
аб
Рис. 57. Схема для определения поперечной устойчивости компактора
Допустимый угол поперечного уклона по условию опрокидывания определяется из выражения
tg = |
0,5В е |
, |
(33) |
|
1,2h |
|
|
|
ц |
|
|
где В – колея машины или ширина вальца; е – эксцентриситет центра тяжести относительно продольной оси машины; hц – высота центра тяжести.
Допустимый угол поперечного уклона по условию сцепления движителя с дорогой находят с помощью равенства
tg = 0,8 с/1,2. |
(34) |
Коэффициент запаса устойчивости при движении на закруглениях дороги по условию опрокидывания
104
K |
|
|
(0,5В е) g |
≥ 1,2, |
(35) |
|
y |
h v2 |
|||||
|
|
|
|
|||
|
|
|
ц |
|
|
где – радиус закругления дороги, м; g – ускорение свободного падения, м/с2; v – скорость движения, м/с.
Коэффициент запаса поперечной устойчивости при движении на закруглениях дороги по условию сцепления движителя
K |
y |
|
0,8 с |
g ≥ 1,2. |
(36) |
|
|||||
|
|
v2 |
|
||
Используя результаты расчетов, в техническую характеристику компактора вносят наименьшие из полученных предельных углов продольной и поперечной устойчивости.
105

Глава 7 . ОСНОВЫ РАСЧЕТА БУЛЬДОЗЕРНОГО ОБОРУДОВАНИЯ КОМПАКТОРОВ НА ПРОЧНОСТЬ
При расчете бульдозерного оборудования следует рассматривать сочетание нагрузок и соответствующие определенные положения оборудования.
Расчетное положение 1. Удар в препятствие серединой отвала. Сила Ру может быть приложена в любой точке нижней половины отвала, лежащей на оси симметрии (рис. 58). Величина Ру, кН, определяется по формуле
Py = kc Gк с + vp |
Gк с01 |
, |
(37) |
|
g |
||||
|
|
|
где с – коэффициент сцепления; vр – рабочая скорость, м/с; vх – скорость холостого хода, м/с; Gк – вес компактора, кН; g – ускорение свободного падения, м/с2.
Величина kc определяется по табл. 11.
|
|
|
|
|
Таблица 11 |
|
|
|
|
|
|
|
|
vp/vx |
0,0 |
0,25 |
0,5 |
0,75 |
|
1,0 |
kc |
1,0 |
0,94 |
0,72 |
0,53 |
|
0,44 |
 z
z
 y
y
Pу |
х |
Рис. 58. Расчетное положение № 1. Удар средней частью отвала
106
При промежуточных значениях vp/vx величина kc определяется линейной интерполяцией.
Величина c01 определяется по формуле
c01 = |
c11 c2 |
, |
(38) |
|
|
||||
|
c |
c |
|
|
|
11 |
2 |
|
|
где с11 – коэффициент жесткости препятствия, который для компакторов принимается с11 = 18,15 103 кН/м; с2 – коэффициент жесткости навесного оборудования, с2 = 90Gк, кН/м.
При определении с2 следует принимать вес компактора Gк, кН. При расчете компакторов на прочность величина коэффициен-
та сцепления с принимается 0,85.
Расчетное положение 2. Удар краем отвала (рис. 59).
 z
z
 y
y
Pу
Рис. 59. Расчетное положение № 2. Удар краем отвала
Нагрузка определяется по формулам (37), (38), в которых коэффициент жесткости препятствия для компакторов принимается
с11 = 0,52 103 кН/м.
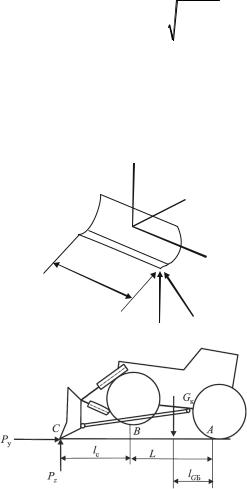
Расчетное положение 3. В процессе заглубления отвала при одновременном движении вперед компактор вывешивается на крайней точке отвала (рис. 60).
Нагрузки определяются по формулам
Pz = Gк lGБ , |
(39) |
L lc
107
Py = kc Gк + vp |
|
Gк с01 |
; |
(40) |
|
|
g |
||||
|
|
|
|
|
|
Px = |
kc (Gк Pz ) сB |
, |
|
(41) |
|
2(L lc ) |
|
||||
|
|
|
|
|
|
гдеlGБ – расстояние от центра масс компактора до точки А; L – база
компактора, м; lc – расстояние от переднего края опорной поверхности до режущей кромки отвала, м; В – длина отвала, м.
 z
z
 y
y
 х
х
B Pу
Pz Px
Рис. 60. Расчетное положение № 3. Заглубление при движении вперед.
Компактор вывешивается на крайней точке отвала
В (40) с01 определяется по (38) при с11 = 8,5 102 кН/м. Расчетное положение 4. Выглубление отвала при одновре-
менном движении вперед. Нагрузки, приложенные к крайней точке отвала (рис. 61), определяются по формулам
108

|
|
|
|
1 |
|
|
|
S |
ш |
а G l |
|
k |
|
|
h |
|
|||||||
Pz = |
|
|
|
|
|
|
|
|
|
|
|
|
БО 1 |
|
Gк |
c |
|
с 0,3 |
|
|
– |
||
|
h k |
|
|
|
|
|
|
|
|
l |
|
|
|||||||||||
|
1 |
с |
0,3 |
|
|
|
|
|
|
2,5 |
l |
|
|||||||||||
|
|
|
c |
|
|
|
|
|
0 |
|
|
|
|
|
|
0 |
|
||||||
|
l0 |
2,5 |
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
– vр |
|
h |
G с |
|
, |
|
|
|
|
|
(42) |
|||||
|
|
|
|
|
|
|
|
|
|
к 01 |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
l0 |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
g |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где l0 – расстояние от упряжного шарнира до режущей кромки отвала, м; a – расстояние от упряжного шарнира до оси гидроцилиндра подъема отвала, м; h – высота упряжного шарнира, м; l1 – расстояние от упряжного шарнира до оси, проходящей через центр тяжести бульдозерного оборудования, м; GБО– вес бульдозерногооборудования, кН.
При k2,5c с – 0,3 < 0 следует принимать k2,5c с – 0,3 = 0.
 z
z
 y
y
 х
х
Pу |
Px |
|
|
|
Pz |
Рис. 61. Расчетное положение № 4. |
|
Выглубление отвала при движении |
|
вперед. Нагрузка приложена к крайней точке отвала
|
|
|
|
|
|
|
|
|
|
Pу = |
Sша GБОl1 |
Pz l0 |
; |
|
(43) |
||
|
|
|
||||||
|
|
l0 |
|
h |
|
|
|
|
(Gк Pz ) сB |
при (G |
P ) |
с |
T; |
||||
|
2l0 |
|
|
к |
z |
|
||
|
|
|
|
|
|
(44) |
||
Px |
|
|
|
|
|
|
|
|
Gк |
при |
(Gк |
Pz ) с |
T. |
|
|
||
|
2 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
109
Уравнения, из которых определены значения Ру и Рz, выраженные формулами (42) и (43),
|
|
Pz = |
Sша GБОl1 Py h |
; |
(45) |
|||
|
|
|
||||||
|
|
|
|
l0 |
|
|
|
|
Pу = (G |
P ) kc с + vр |
Gк с01 |
– f |
(G P ). |
(46) |
|||
к |
z |
2,5 |
|
g |
1 |
к z |
|
|
В формулах (42), (43) Sш – суммарное усилие в штоковых полостях гидроцилиндров подъема отвала, определяемое по формуле
Sш = |
p (D2 |
D2 ), |
(47) |
|
|
2 |
п |
ш |
|
где р – давление настройки предохранительного клапана, кН/м2; Dп – диаметр поршня, м; Dш – диаметр штока, м.
Расчетное положение 5. Удар в препятствие боковой поверхностью отвала при развороте на месте (рис. 62).
|
z |
Px |
y |
|
х |
Рис. 62. Расчетное положение № 5. Разворот на месте. Удар боковой поверхностью отвала
Сила Рх может быть приложена в любой точке нижней полови-
ны отвала. Ее величина определяется по формуле |
|
Px = Ic05 , |
(48) |
где – угловаяскоростьвращениякомпактораотносительноцентраповоротаприудареотваломвжесткоепрепятствие, с–1, определяемаяпоформуле
= |
vp |
, |
(49) |
Bк
где I – момент инерции компактора относительно вертикальной оси, проходящей через центр тяжести, т·м2, определяемый по формуле
110