

книги / Математическое моделирование процессов механической обработки
..pdfПолучено уравнение в операторной виде, описывающее изменение напряжения в цепи (скорости движения исполнительного органа – суппорта привода подачи) при ненулевых начальных условиях (в самом общем случае).
Выражение для изображения тока I1(р) определим следующим образом:
I |
p |
E p |
|
, |
(44) |
|
Zвх p |
|
|||||
1 |
|
|
|
|||
|
|
|
|
где Zвх p – входное операторное сопротивление цепи.
|
|
|
|
|
|
|
R |
|
1 |
|
p2 |
L R C p L R |
|
|
|||||
Zвх p p L |
|
R |
|
|
|
|
|
|
|
|
, |
|
|||||||
p C |
|
|
|
|
|
p R C 1 |
|
||||||||||||
|
|
|
|
|
|
|
|
p C |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
E |
|
p R C 1 |
|
|
|
|
p |
E |
|
p |
2 |
L R C p L R |
|
|
|
|
|
|
|
|
|
|
|||
I |
|
|
|
|
|
|
|
|
. |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||
1 |
|
p |
|
|
p R C 1 |
|
|
|
p3 L |
R C p2 L p R |
|
||||||||
|
|
|
|
|
|
|
|
||||||||||||
Получено уравнение в операторном виде, описывающее изменение тока в цепи (тягового усилия на ходовом винте привода подач исполнительного органа) при нулевых начальных условиях.
Полученные уравнения позволяют подробно проанализировать работу механизма (как, впрочем, и любого другого механизма) станка в следующих режимах:
1.Режим пуска двигателя, когда суппорт станка из состояния покоя приводится в движение, т.е. пуск привода на холостом ходу, начальные условия в этом случае равны нулю, так как массы не двигаются, валы не растянуты.
2.Режим переключения скорости движения суппорта станка
содной ступени на другую. Начальные условия в этом случае не равны нулю. Таким образом, внутренние источники будут оказывать существенное влияние на протекание переходного процесса.
3.Режим торможения, когда тормозным устройством в приводе скорость движения суппорта изменяется от какого-то определенного значения до нуля. Начальные условия в этом случае не равны нулю.
51

4.Режим, когда на суппорт начинает действовать сила резания (скажем, PZ) – при врезании резца в заготовку, закрепленную
впатроне шпинделя станка. Этому режиму будет соответствовать электрическая схема, в которой к выходу приложен источник тока, включаемый специальным ключом. Начальные условия в этом случае не равны нулю, и внутренние источники оказывают воздействие на протекание переходного процесса в приводе.
5.Режим стационарной работы привода, когда на суппорт действует сила резания PZ, изменяющаяся, например, по косинусоидальному гармоническому закону. Этому режиму будет соответствовать электрическая схема, в которой к выходу цепи приложен источник тока с гармоническим воздействием. Начальные условия в этом случае не равны нулю, внутренние источники будут оказывать существенное воздействие на протекание стационарного процесса в приводе станка.
Проверка адекватности метода электроаналогии
Рассмотрим вынужденные колебания линейной системы с одной степенью свободы с учетом трения. Принципиальная схема такой системы приведена на рис. 3. В этой схеме тело массой m удерживается упругой связью с жесткостью С с учетом трения (демпфером).
1. Классическое решение методом теории колебаний. Рассмотрим воздействие на систему с вязким трением внезапной нагрузки:
0 (t 0),
P t P0 t 0 .
В этом случае уравнение движения груза массой m имеет вид
m x C x R P0 ,
где m – масса груза (тела); с – жесткость пружины; R – сила трения. Зависимость силы трения R от смещения или скорости дви-
жения определяется физической природой трения. Наиболее про-
52
стым случаем является так называемое вязкое трение, когда сила трения пропорциональна скорости движения:
R a x. |
(45) |
Тогда уравнение будет иметь вид
m x C x a x P0 ,
при этом можно получить уравнение вида
|
|
|
|
|
|
x 2 n x p2 x P , |
|||||
|
|
|
|
|
|
|
|
|
0 |
||
|
|
|
|
|
|
|
|
|
|
|
|
где n |
a |
; |
p2 |
C |
; |
p |
C |
|
– угловая частота собственных |
||
2m |
m |
m |
|||||||||
|
|
|
|
|
|
|
|
||||
колебаний соответствующей консервативной системы.
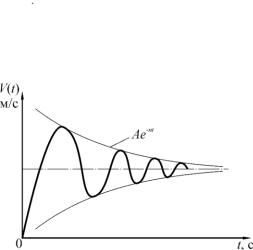
Решение полученного уравнения будет определяться следующей формулой (промежуточных выкладок не приводим; графическая интерпретация решения приведена на рис. 24):
|
|
|
|
|
|
|
|
P |
|
|
|
|
n |
|
|
|
||
|
|
|
|
|
|
x |
0 |
|
1 e n t cos p1 t |
|
|
|
sin p1 |
t , |
||||
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
C |
|
|
|
|
p1 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
где p |
|
p2 n2 |
– |
угловая |
частота |
|
затухающих колебаний; |
|||||||||||
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
– период этих колебаний, т.е. время между двумя последо- |
|||||||||||||||
|
||||||||||||||||||
1 |
|
p1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
вательными максимальными отклонениями AK и AK+1 составляет |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
AK |
en 1 ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
AK 1 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
ln |
|
|
K |
|
n 1 |
– логарифмический декремент колебания. |
|||||||||||
|
|
|
|
|||||||||||||||
|
|
|
|
AK 1 |
|
|
|
|
|
|
|
|
|
|
|
|||
53

В данном случае
n |
2 n |
|
|
|
|
2 n |
|
, |
||
|
|
|
|
|
|
|
|
|||
1 |
p1 |
|
|
p2 n2 |
||||||
|
|
|
||||||||
p1 |
|
|
|
p |
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|||
1 2 |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|||
 2 2
2 2
Из полученной формулы видно, что даже при значительном затухании частота p1 затухающих колебаний мало отличается от частоты соответственных колебаний р соответствующей консервативной системы.
Рис. 24. Затухание колебаний линейной системы
Решим пример при следующих численных значениях величин параметров системы с одной степенью свободы:
m = 20 кг; P0 =100 Н;
α = 100 (Н с)/м; С = 500 Н/м.
При этом |
|
|
|||
|
|
|
|
|
|
p |
500 |
|
5 рад/с; |
||
20 |
|||||
|
|
|
|
||
54

n |
100 |
2,51/с; |
|
2 20 |
|||
|
|
p1 
 25 6,25 4,331/с;
25 6,25 4,331/с;
n 0,577. p1
Получим уравнение
x 100500 1 e 2,5 t cos 4,33t 0,577sin 4,33t .
Окончательное уравнение
x 0,2 1 e 2,5 t cos 4,33t 0,577sin 4,33t .
Для получения выражения для скорости движения груза продифференцируем данное уравнение по времени:
x V dxdt d 0,2 0,2e 2,5 t cos 4,33t 0,577sin 4,33t .
Не приводя промежуточных выкладок, запишем окончательный результат:
x V 1,154e 2,5 tsin 4,33t .
Решение операторным способом по методу электроаналогии
Механическая цепь линейной системы с одной степенью свободы с учетом трения приведена на рис. 4. По механической цепи составлена эквивалентная электрическая схема, которая приведена на рис. 5. Операторная схема замещения с нулевыми начальными условиями приведена на рис. 25.
55

Рис. 25. Операторная схема замещения системы с одной степенью свободы
Определим входное операторное сопротивление электриче-
ской цепи Zвх(р): |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Zвх p |
p L R 1 |
|
p L R |
|
1 |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
p L R p C |
p L |
R |
|
|
||||||||||
|
|
|
|
|
|
p C |
|||||||||
|
p L R |
|
|
p2 L R C p L R |
|
|
|
|
p L R |
||||||
|
|
|
|
. |
|||||||||||
p C p L R |
|
p C p L R |
p2 L R C p L R |
||||||||||||
Найдем изображение напряженияU(p):
U p I p Zвх |
p |
I |
|
|
|
p L R |
|
|||
p p2 L R C p L R |
||||||||||
|
|
|
|
|||||||
|
|
I L R |
|
. |
|
|||||
|
|
|
|
|
|
|
|
|||
p2 |
L R C |
|
|
|
||||||
|
p L R |
|
||||||||
Получено уравнение в операторном виде, описывающее изменение скорости груза на пружине с демпфером при действии внезапно приложенной нагрузки, для этого необходимо перейти от изображения по Лапласу р к оригиналу, т.е. параметру времени t.
Переход осуществим по формуле разложения
N p |
m |
N p |
|
|
|
|
|
k |
|
e pk t . |
|
M p |
M pk |
||||
k 1 |
|
||||
56

Исходные данные для расчета принимаем те же, что и в первом случае:
С = 20 кг;
I = 100 Н;
R = 0,01 м/(Н с);
L = 2 10–9м/Н.
В соответствии с исходными данными выражение для изображения U(p) будет иметь вид
U p |
|
2 10 3 |
|
|
N p |
. |
|
10 3 p2 2 10 3 p 0,01 |
M p |
||||
0, 4 |
|
|
||||
Найдем первую производную характеристического уравнения М(р):
M p 0, 2 10 3 p 2 10 3.
Решаем характеристическое уравнение М(р) = 0:
M p 0, 4 10 3 p2 2 10 3 p 0,01 0.
Найдем |
корни характеристического уравнения M(p) = 0 |
||||||||
(квадратное уравнение): |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|||
p |
|
2 10 |
3 |
|
|
2 10 3 2 0, 4 10 3 4 0,01 |
|
|
|
|
|
|
|
|
|
||||
1 2 |
|
0,8 10 3 |
|
|
0,8 10 3 |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
2,5 j 4,33. |
|
|
|
||
Подставим значения корней в выражение для первой произ- |
|||||||||
водной M p1 2 : |
|
|
|
|
|
|
|
||
M p1 2 0,8 10 3 2,5 j 4,33 2 10 3 j 3, 47 10 3. |
|||||||||
Преобразуем значения M p1 2 j 3, 47 10 3 |
в показатель- |
||||||||
ную форму (рис. 26). |
|
|
|
|
|
|
|
||
57
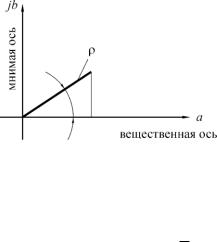
Рис. 26. Комплексная плоскость
Любое комплексное число +jb в нашем конкретном случае можно представить в виде
j b p e j ; arctg b ,
так как j b 3, 47 10 3 , следовательно, = 90 , тогда
3,47 10 3 3,47 10 3 e j 90 .
Подставим полученное выражение в формулу разложения:
U t |
2 |
10 3 |
e 2,5 j 4,33 t 0,577e j 90 e 2,5 j 4,33 t . |
||
3, 47 |
|
10 3 e j 90 |
|||
|
|
||||
В данном случае целесообразно перейти от показательной формы записи к тригонометрической ее форме, попутно избавившись от комплексных чисел. Для перехода от показательной формы к тригонометрической применяются формулы Эйлера:
e j cos j sin ; |
(46) |
||||
cos |
e j e j |
(47) |
|||
|
|
; |
|||
2 |
|
||||
|
|
|
|
|
|
sin |
|
e j e j |
(48) |
||
|
|
; |
|||
|
2 |
||||
|
|
|
|
|
|
e j cos j sin . |
(49) |
||||
58
Тогда
Ut 2 0,577e 2,5 t cos 90 4,33t 1,154e 2,5 t sin4,33t.
Внатуральном выражении уравнение будет иметь вид
x t V t 1,154e 2,5 tsin4,33t.
Графическая интерпретация полученного уравнения приведена на рис. 27.
Рис. 27. Переходный процесс в системе с одной степенью свободы
Таким образом, два метода решения поставленной задачи дают уравнения одинакового вида с идентичными параметрами системы. Это обстоятельство позволяет сделать выводы о том, что математические модели, разработанные на основе электрических аналогий операторным методом, способны адекватно описывать процессы, происходящие в станочных системах различной физической природы.
Кроме того, получим решение в операторном виде при ненулевых начальных условиях, если таковые имеются на индуктивности L (например, пружина предварительно сжата или растянута) и емкости С; начальные условия на емкости равны нулю, так как скорость движения груза в начальный период времени t = 0
59

равна нулю (V = 0). Операторная схема замещения при ненулевых начальных условиях будет иметь вид, приведенный на рис. 28.
Рис. 28. Операторная схема замещения системы с одной степенью свободы при ненулевых начальных условиях
Пользуясь законами Ома и Кирхгофа, найдем изображение напряжения U(p) в цепи.
Индексы сопротивлений Z(p) и напряжений Е(р) по токам цепи:
|
|
|
|
|
|
|
|
|
Z1 p p L, |
|
|
|
|
|
|
|
||||||
E p |
I |
|
|
p L i 0 L I L i 0 L, |
|
|
||||||||||||||||
|
|
|
||||||||||||||||||||
1 |
|
|
|
|
|
p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
Z2 p |
|
p L R |
|
, |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
p L R |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
E2 p |
|
E1 p |
Z2 p |
|
I L i 0 L |
|
p L R |
|
|
|||||||||||||
|
Z |
p |
|
|
|
p L |
|
|
|
p L R |
|
|||||||||||
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I L R i 0 L R |
, |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
p L R |
|
|
|
|
|
|
|
||||||
|
|
1 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
p L R |
|
|||||
Z3 p Z2 p |
|
|
|
|
|
|
Z2 p |
|
|
|
|
|
|
|
|
|
, |
|||||
|
|
|
|
|
|
|
|
p2 L R C |
p L R |
|||||||||||||
|
|
p C |
|
|
p C |
|
|
|||||||||||||||
60