

книги / Математические модели движения транспортных средств
..pdfЭто уравнение позволяет проанализировать влияние параметров автомобиля на характеристики движения и дать оценку показателей его тягово-скоростных свойств в конкретных дорожных условиях.
При анализе движения автопоезда в уравнения (5.19) и (5.21) дополнительно включается сила сопротивления движению прицепа:
Fпр = mпgψ+δп.м.прmпа+ Fw пр, |
(5.22) |
где mп – масса прицепа; δп.м.пр – коэффициент приведенной массы прицепа; Fw пр – сила сопротивления воздуха движению прицепа.
Если рассматривать движение автопоезда как единой системы, целесообразно использовать уравнение, аналогичное уравнению (5.21):
δ |
п.м.ап |
m dv |
= |
Mдuтрηтр |
−m |
gψ−k |
A v2 |
, |
(5.23) |
|
r |
||||||||||
|
aп dt |
|
aп |
|
w ап л |
|
|
|||
|
|
|
|
к0 |
|
|
|
|
|
где δп.м.ап – коэффициент приведенной массы автопоезда (отличается от δп.м учетом моментов инерции колес прицепа); mап – масса автопоезда; kwап – коэффициент сопротивления воздуха, kwап = (1,2...1,3) kw.
Если значения моментов инерции Jд и Jк неизвестны, то δп.м (или δп.м.ап) определяют по эмпирической формуле
δп.м =1+ |
(δ1 |
+δ2uк2.п )ma |
, |
(5.24) |
|
m |
|||
|
|
|
|
где δ1 = 0,03...0,05; δ2 = 0,04...0,06; uк.п – передаточное число коробки передач; mа – полная масса автомобиля (автопоезда); m – фактическая масса автомобиля.
Для случая движения автомобиля с отсоединенным от трансмиссии двигателем (накат, торможение) δ2 = 0, тогда δп.м ≈ 1,05.
5.3.Динамика автомобиля, транспортирующего емкости
сжидкостью
Рассмотрим микроскопическую модель движения автомобиля, транспортирующего жидкий груз в баках, которые заполнены не полностью. Таким грузом может быть жидкое топливо, строи-
71
тельный раствор, вода и др. Реализуемая в последнее время стратегия перевода автомобилей на экологически более чистое альтернативное топливо – сжиженный природный газ (СПГ) также требует создания спецавтотехники для доставки его к потребителям. Учитывая специфику транспортирования жидкостей, необходимо определить надежные скоростные режимы движения автомобиля-перевозчика, а также динамические нагрузки, действующие на узлы крепления емкости с жидким грузом для расчета их на прочность. Возникает необходимость разработки методики расчета по определению динамики поведения автомобиля при движении по прямой и на поворотах с целью исключения аварийных ситуаций.
Требования безопасности при движении автомобиля
Требования безопасности при движении транспортных средств
иавтопоездов сводятся к ограничению тормозного пути, замедлению
идругих параметров, приведенных в табл. 5.2 при заданной начальной скорости торможения.
|
|
|
|
|
|
|
|
|
Таблица 5.2 |
|
|
|
|
Требования безопасности |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
Тип транс- |
|
Начальная |
|
Тормозной |
|
Установленное |
|
Время |
|
|
|
|
|
|
|
|||||
|
портного |
|
скорость |
|
путь Sт, м |
|
замедление, |
|
срабатывания, |
|
|
средства |
|
торможения |
|
не более |
|
aуст, м/с2 |
|
tср, с не более |
|
|
|
|
v0, км/ч |
|
|
|
не менее |
|
|
|
|
Одиночные |
|
|
|
|
|
|
|
|
|
|
транспортные |
|
|
|
|
|
|
|
|
|
|
средства |
|
40 |
|
23,0 |
|
4,0 |
|
1,0 |
|
|
Автопоезда |
|
40 |
|
25,0 |
|
4,0 |
|
1,2 |
|
|
Если начальная скорость v0 отличается от табличной, то тормоз- |
|||||||||
ной путь может быть рассчитан по формуле |
|
|
|
|||||||
|
|
|
Sт = A v0 + v2 (26aуст ), |
(5.25) |
||||||
72 |
|
|
|
|
|
|
|
|
|
|
где v0, км/ч – начальная скорость, А = 0,19 для одиночных транс-
портных средств и А = 0,24 – для автопоездов, aуст – установленное замедление, м/с2.
Динамика торможения автомобиля без учета движения жидкости
Предположим, что автомобиль начинает торможение со скоростью v0 под действием постоянной силы трения Fтр. В этом случае равнозамедленного движения тормозной путь Sт и начальная скорость v0 связаны кинематическими соотношениями
S |
т |
= v t −at2 |
2 , 0 = v −at. |
|
0 |
0 |
Из решения этой системы уравнений определяются время торможения t и ускорение a:
t = 2S |
т |
v , |
a = v2 |
(2S |
т |
). |
(5.26) |
|
0 |
0 |
|
|
|
Сила трения может быть найдена с учетом массы автомобиля m0 и коэффициента трения µ:
Fтр = m0 gµ.
Уравнение движения автомобиля под действием силы трения
m0 ddvt = −Fтр
приводится с использованием подстановки ddvt = v ddSv к виду
0 |
|
2 |
Sт |
∫ d v |
|
= −∫ gµdS, |
|
v0 |
2 |
0 |
|
|
|
||
из которого определяется средний коэффициент трения
µ = v2 |
(2gS |
т |
). |
(5.27) |
0 |
|
|
|
|
|
|
|
|
73 |

Например, при заданной начальной скорости v0 = 40 км/ч и тормозном пути Sт = 17,7 м время торможения составит 3,2 с, а коэффициент трения µ = 0,36.
5.3.1 Динамика торможения автомобиля при движении по прямой
Рассмотрим движение автомобиля с баками, заполненными жидкостью. Коэффициент заполнения баков Кз (отношение объема жидкости к объему бака) задан. При Кз = 1 в предельном случае торможения жидкость может полностью смещаться в направлении движения (рис. 5.2). Будем считать, что координаты геометрических центров баков заданы (xci, yci, zci, i = 1, 2, …, n), n – количество баков.
y |
|
|
|
|
|
|
l |
|
|
|||
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(xc, yc) (x′c, yc) |
|||||
|
|
|
D |
|
|
|||||||
|
|
|
|
|
ma |
|||||||
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
(xc, y′c) |
|||||
|
|
|
|
|
|
|
mg |
|||||
R |
|
|
|
|
|
|
l′ |
|
|
|
|
Rп |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x
Lx
Рис. 5.2. Схема сил, действующих на автомобиль с емкостью при движении по прямой
Найдем реакции колеса, которые дает один бак с жидкостью массой mж при прямолинейном движении. Проекции сил на ось y и равенство моментов сил (см. рис. 5.2)
74

Rз + Rп = mжg, RпLx −mжgxc = 0
дают решение для реакций переднего (Rп) и заднего (Rз) колес:
Rп = mжgxc , Rз = mжg Lx L−x xc .
В общем случае для n баков
n |
|
g |
n |
|
|
Rп = g∑mxi xci , |
Rз = |
∑mxi (Lx − xci ). |
(5.28) |
||
|
|||||
i=1 |
|
L |
|
||
|
x i=1 |
|
|||
При движении по прямому участку дороги с торможением жидкость в баках смещается в направлении движения на величину
а реакции колес |
|
|
|
|
∆xi |
= xc′ − xc , |
|
|
|
|
|
(5.29) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
g |
|
n |
|
|
a |
|
|
|
|
|
Rп |
= |
|
|
∑mжi xci |
+ ∆xi + |
|
|
yci , |
|
||||
Lx |
g |
|
|||||||||||
|
|
i=1 |
|
|
|
|
|
(5.30) |
|||||
|
g |
|
n |
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|||||
Rз = |
|
|
∑mжi Lx − xci −∆xi − |
|
|
yci . |
|
||||||
|
|
|
g |
|
|||||||||
|
Lx i=1 |
|
|
|
|
|
|
|
|
||||
Вариант движения автомобиля при торможении только задними колесами является наихудшим, так как при смещении жидкости в баках вперед реакция на задние колеса и соответственно сила торможения уменьшаются. В этом случае выражение тормозного пути имеет вид
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
2 |
L |
|
|
ma + ∑mжi |
|
|
|
|
|
|
= |
v |
|
|
i=1 |
|
|
|
||
S |
т |
0 |
x |
|
|
|
|
, |
|||
2µg |
|
n |
|
|
|
||||||
|
|
|
|
|
a |
|
|
||||
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
∑mжi Lx − xci |
−∆xi − |
|
yci |
|
|
|
|
|
|
|
g |
|
|||||
|
|
|
|
|
|
i=1 |
|
|
|
|
|
n
где ma – масса автомобиля с пустыми баками; mx = ∑mжi
i=1
(5.31)
– масса
жидкости в баках.
Для сравнения аналогичный путь торможения, при котором жидкость не смещается (∆xi = 0, yci′ = yci −∆yi ), имеет вид
75
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
v |
2 |
L |
|
|
ma + ∑mжi |
|
|
|
|
|
|
= |
|
|
|
i=1 |
|
|
|
|
||
S |
т |
0 |
x |
|
|
|
|
, |
(5.32) |
|||
2µg |
|
n |
|
a |
|
|||||||
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
∑mжi Lx − xci − |
|
yci |
|
|
|
|
|
|
|
|
|
g |
|
|
||||
|
|
|
|
|
|
|
i=1 |
|
|
|
|
|
где ∆yi = yci − yci′ – смещение центра масс жидкости в баке при торможении.
Зависимости между скоростями v0′ без учета смещения жидкости и v0 – с учетом смещения жидкости в баках определяются из сравнения тормозных путей (5.31), (5.32):
|
|
n |
|
|
|
|
|
|
|
v0′ |
|
∑(lx − xci −∆xi −ayci g) |
|
||||||
= v0 |
i=1 |
|
|
|
|
|
. |
(5.33) |
|
n |
− x |
−a( y −∆y |
) |
|
|||||
|
|
l |
g |
|
|||||
|
|
∑ x |
ci |
ci |
i |
|
|
|
|
i=1
Таким образом, для того чтобы сохранить стандартный тормозной путь, необходимо при перевозке жидкости в баках начальную скорость автомобиля уменьшить на величину
|
|
|
|
|
n |
|
|
g) |
|
|
|
|
|
v0′ |
|
∑(lx − xci −∆xi −ayci |
|
|
|
||||
|
|
i=1 |
|
|
|
|
|
|
|||
|
1− |
|
|
= 1− |
|
|
|
|
|
100 %. |
(5.34) |
|
|
n |
|
|
|
||||||
|
|
v0 |
|
∑ lx − xci −a( yci −∆yi ) |
g |
|
|
||||
|
|
|
|
|
|||||||
|
|
|
|
|
i=1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5.3.2. Динамика равномерного движения автомобиля |
|
|||||||||
|
|
|
|
|
по повороту |
|
|
|
|
||
|
При движении автомобиля по повороту радиусом R на каждую |
||||||||||
цистерну действует сила тяжести |
Fт = mжg и центробежная сила |
||||||||||
F |
= m v2 R |
(рис. 5.3), |
их равнодействующая в направлении под |
||||||||
цб |
ж 0 |
|
|
|
|
|
|
|
|
|
|
углом α к вертикали так, что |
|
|
|
|
|
|
|||||
|
|
|
|
tgα = F |
F |
= v2 R. |
|
|
|
(5.35) |
|
|
|
|
|
|
цб |
т |
0 |
|
|
|
|
76 |
|
|
|
|
|
|
|
|
|
|
|

y
|
|
|
|
|
|
|
|
|
Fцб |
||||
ya |
|
F′цб |
|
mжg |
|||||||||
Rл |
|
|
|
|
|
Rп |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
mag |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Lz/2 |
|
|
|
Lz/2 |
|
|
|||
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 5.3. Схема сил, действующих на автомобиль
семкостью при движении на повороте
Вслучае n цистерн скорость движения автомобиля по повороту, при которой он начинает опрокидываться (отсутствует реакция левой опоры, Rл = 0), определяется по формуле
|
|
|
n |
z |
+ ∆z′ |
|
|||
|
|
g∑mжi 1− |
ci |
i |
RLz |
|
|||
|
|
|
|
||||||
v |
= |
|
i=1 |
|
Lz |
. |
(5.36) |
||
|
|
n |
|
||||||
0 |
|
|
|
( yci −∆yi′) |
|
||||
|
|
|
ma ya + ∑mжi |
|
|||||
i=1
5.3.3.Расчет дополнительных усилий, вызванных движением
жидкости в баках
Транспортирование на автомобиле емкости, которая не полностью заполнена жидкостью, вызывает при торможении (разгоне) дополнительные усилия на кронштейны крепления емкости, а также повышение давления жидкости.
77

Расчет усилия на кронштейны крепления проводится в предположении, что в предельном случае вся сила инерции нагружает кронштейны, работающие на растяжение. Сила инерции при торможении с ускорением a зависит от массы баков nmб и массы жидкости в баках nmж, где n – число баков. В результате получаем
|
|
n(m |
+ m |
)v2 |
|
|
F |
= |
б |
ж |
0 |
. |
(5.37) |
|
|
|
||||
и |
|
|
Sт |
|
|
|
|
|
|
|
|
|
|
Для уменьшения дополнительных динамических воздействий от движения жидкости баки разделяются на отсеки внутренними перегородками. В баке длиной Lx, разделенном на отсеки перегородками, жидкость в каждом отсеке при торможении смещается, оказывая дополнительное давление. Величина этого давления может быть найдена из второго закона Ньютона ∆(mv) = F∆t.
Учитывая, что ∆(mv) = mv −(−mv) = 2mv, F = p πD2  4, а ∆t = = 2Sт
4, а ∆t = = 2Sт  v0 , получаем формулу для расчета дополнительного давления
v0 , получаем формулу для расчета дополнительного давления
|
8a∆m |
4∆m v2 |
|
||
p = |
ж |
= |
ж 0 |
, |
(5.38) |
|
|
||||
|
πD2 |
πD2 Sт |
|
||
где ∆mж – масса жидкости в отсеке; v0 – скорость автомобиля; D –
диаметр бака; Sт – тормозной путь автомобиля.
Параметрические расчеты проводились при исходных данных, представленных в табл. 5.3.
Таблица 5.3
Исходные данные для расчета
|
№ |
|
|
|
Числен- |
|
|
|
|
|
|
||
|
Наименование |
Обозначение |
Размерность |
ное |
|
|
|
п/п |
|
||||
|
|
|
|
значение |
|
|
|
|
|
|
|
|
|
|
1 |
Скорость движения автомобиля |
v0 |
км/ч |
40 |
|
|
2 |
Число баков |
n |
– |
15 |
|
|
3 |
Число перегородок в баке |
nп |
– |
4 |
|
|
4 |
Длина бака |
l |
м |
10,65 |
|
78 |
|
|
|
|
|
|
Окончание табл. 5.3
|
№ |
|
|
|
Числен- |
|
|
|
|
|
|
||
|
Наименование |
Обозначение |
Размерность |
ное |
|
|
|
п/п |
|
||||
|
|
|
|
значение |
|
|
|
|
|
|
|
|
|
|
5 |
Диаметр бака |
D |
м |
0,51 |
|
|
6 |
Масса одного пустого бака |
mб |
кг |
167 |
|
|
7 |
Плотность жидкости |
ρ |
кг/м3 |
430 |
|
|
8 |
Коэффициент заполнения |
Кз |
– |
0,5 |
|
|
9 |
Колея автомобиля |
Lz |
м |
2,5 |
|
|
10 |
База автомобиля |
Lx |
м |
8,72 |
|
|
11 |
Масса автомобиля |
ma |
кг |
30000 |
|
|
12 |
Высота центра тяжести автомо- |
ya |
м |
1,2 |
|
|
|
биля |
|
|
|
|
|
13 |
Радиус поворота автомобиля |
R |
м |
40 |
|
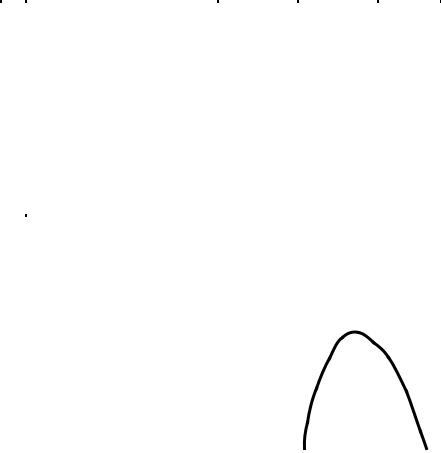
Тормозной путь снаряженного автомобиля с СПГ зависит от коэффициента заполнения баков (рис. 5.4), максимальный тормозной путь отмечается при половинном заполнении баков. Из рис. 5.5 вид-
но, что с увеличением числа попе- |
1,2 |
|
|
|
|
|
|||
речных перегородок в баке разница |
|
|
|
|
|
|
|
|
|
в начальной скорости при торможе- |
|
↑ 1,1 |
|
|
|
|
|
||
|
|
|
|
|
|
||||
нии автомобиля уменьшается, при |
|
|
|
|
|
|
|||
увеличении количества поперечных |
|
Sт |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
Sт′ |
|
|
|
|
|
|||
перегородок в баке безопасное тор- |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
||
можение обеспечивается при боль- |
1,0 |
|
|
|
|
|
|||
шей начальной скорости. |
|
|
|
|
|
|
|
|
|
0 |
0,5 |
1,0 |
|||||||
С увеличением числа перегоро- |
|||||||||
|
|
|
|
Кз → |
|
|
|||
док уменьшаются и усилия на крон- |
|
|
|
|
|
|
|||
штейны (рис. 5.6), из которого также |
Рис. 5.4. Зависимость относи- |
||||||||
видно, что при постоянном числе |
тельного тормозного пути авто- |
||||||||
перегородок эти усилия возрастают с |
мобиля (Sт – с жидким грузом, |
||||||||
увеличением начальной скорости |
S′т – с твердым грузом) от коэф- |
||||||||
торможения. |
|
фициента заполнения баков |
|||||||
|
|
|
|
|
|
|
79 |
||

10
↑
∆v
v , % 5
0 1 2 3 4 nп →
Рис. 5.5 Уменьшение скорости автомобиля, перевозящего жидкость, по сравнению со скоростью автомобиля, перевозящего твердый груз, в зависимости от числа перегородок при
сохранении тормозного пути
p·10–4, |
|
|
Па |
nп = 0 |
|
|
4 |
|
↑ |
3 |
1 |
|
||
p |
2 |
2 |
|
||
|
3 |
|
|
|
|
|
1 |
4 |
|
40 |
60 км/ч |
|
v0 |
→ |
Рис. 5.7. Зависимость динамического давления в баке при торможении от начальной скорости и числа перегородок в баке
80
Н·10–4
nп = 0 11 
1
↑9
7 |
|
2 |
|
|
|
Fк |
|
3 |
5 |
|
|
|
4 |
|
|
|
|
3 |
|
|
40 |
60 |
км/ч |
|
v0 |
→ |
Рис. 5.6. Зависимость динамических усилий на кронштейны от начальной скорости торможения автомобиля и числа перегородок в баке
Усилия, действующие на поддерживающие баки кронштейна, зависят от динамического давления перемещающейся в баках жидкости при торможении. Из рис. 5.7 видно, что это давление также возрастает с увеличением начальной скорости торможения, установление поперечных перегородок в баках снижает это давление.
Таким образом, моделирование движения автомобиля, транспортирующего емкости с жидкостью, оказывается полез-