

книги / Маркшейдерское дело. Анализ точности
.pdfЗначенияRxi определяются графически (см. рис. 3.10).
Если от узловой точки С до исходной стороны проложен ход с n углами, то
|
m2 |
2 |
|
2 |
2 |
2 |
|
|
Mп |
|
Rxi |
|
|
|
yi |
nm . |
(3.58) |
2 |
2 |
2 |
||||||
|
L |
|
|
L T |
|
|
|
|
Результаты вычислений сводят в табл. 3.8.
|
|
|
|
Таблица 3 . 8 |
|
Расчет погрешности примыкания на поверхности |
|||||
|
|
|
|
|
|
Проекция |
Rx , м |
Rx2 , м2 |
yi , м |
|
y2 , м2 |
|
i |
i |
|
|
i |
В-3 |
|
|
|
|
|
В-С |
|
|
|
|
|
А-С |
|
|
|
|
|
А-2 |
|
|
|
|
|
А-1 |
|
|
|
|
|
|
|
|
|
|
|
Вычисленное значение погрешности примыкания к отвесам на поверхности необходимо сравнить с допустимым значением СКП дирекционного угла линии, соединяющей отвесы, по отношению к ближайшей стороне ОМС на земной поверхности.
Определение погрешности примыкания в шахте. Эта по-
грешность зависит от погрешностей измерения углов и длин линий в подземном соединительном полигоне (рис. 3.11). Поскольку для
подземных соединительных полигонов ml2i 2li , то погрешность примыкания в шахте определяется по формуле
Mшi |
1 |
m2i Rx2i |
2 2 li sin2 |
i |
(3.59) |
||
L |
|||||||
|
|
|
|
|
|
||
Согласно рис. 3.11 для снятия показаний |
Rx |
с плана необходи- |
|||||
|
|
|
|
i |
|
|
|
мо поделить ход в шахте пополам и относительно средней стороны взять проекции до стволов А и В соответственно. Все данные сводят в табл. 3.9.
41
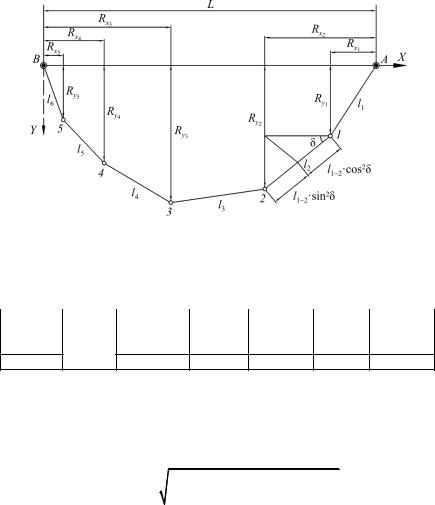
Рис. 3.11. Подземный соединительный полигон
Таблица 3 . 9 Расчет погрешности примыкания в шахте
Сторона |
Длина li, |
Дирекцион- |
R2 m2 |
, м2 |
l |
sin2 |
, м |
R2 m2 |
, м2 |
l |
cos2 |
, м |
полигона |
м |
ныйугол, …º |
xi |
|
i |
i |
|
yi |
|
i |
i |
|
1 |
2 |
3 |
4 |
|
|
5 |
|
6 |
|
|
7 |
|
Примечание: необходимо произвести суммирование вычисленных значений в 4, 5, 6 и 7-м столбцах.
Для вытянутых равносторонних соединительных полигонов ошибку примыкания в шахте можно вычислить по формуле
M |
шi |
m |
(n 1)(2n 1) 6(i 1)(n i) |
, |
(3.60) |
|
|||||
|
i |
6n |
|
||
|
|
|
|
||
где n – число сторон соединительного полигона; i – порядковый номер стороны, для которой определяется погрешность.
Если соединительный полигон имеет форму, отличную от вытянутой, то правильность угловых и линейных измерений в нем можно контролировать по величине расхождения расстояний между отвесами, вычисленных по координатам в единой и условной системах. Допустимое расхождение расстояний между отвесами
42
L 2 M 2 |
M 2 |
, |
(3.61) |
|
l |
|
|
где M и Ml – погрешности расстояния между отвесами, вызван-
ные ошибками измерения углов и длин линий в теодолитных ходах на поверхности и в шахте.
Тогда по формулам накопления погрешностей в свободном полигоне определяем допустимое расхождение расстояний между отвесами:
L 2 |
1 |
m2 |
Ry2i |
2 li cos2 i 2 L2 , |
(3.62) |
2 |
|||||
|
|
|
|
|
|
где Ryi – расстояние от точек соединительного полигона до створа
отвесов (см. рис. 3.11).
Рассчитанную погрешность определения дирекционного угла i-й стороны нужно сравнить с допустимой и сделать вывод о пригодности выбранной методики.
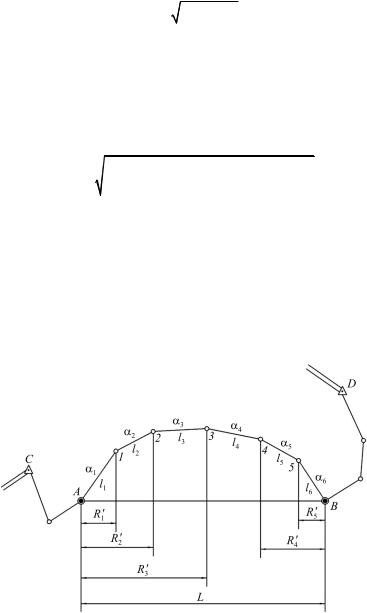
Ориентирование через два ствола целесообразно сочетать с гироскопическим ориентированием хотя бы одной стороны подземного соединительного полигона (рис. 3.12).
Рис. 3.12. Схема взаимосвязи ориентирования через два ствола с гироскопическим ориентированием
43

Разность дирекционных углов f (абсолютная) одной и той же
стороны, определенных при геометрическом и гироскопическом ориентировании, не должна превышать допустимого значения:
f |
доп |
2 m2 |
M 2 |
, |
(3.63) |
|
|
opi |
|
|
|
где m – погрешность гироскопического ориентирования; |
Mopi – |
||||
погрешность геометрического ориентирования, вычисленная по формуле (3.53).
Если разность f допустима, то за окончательное значение дирекционного угла целесообразно принять среднее весовое:
|
ср |
|
f |
, |
(3.64) |
|
|||||
|
1 |
q 1 |
|
||
|
|
|
|
||
где 1 – значение дирекционного угла, определенное гироскопически; f 2 1 , причем 2 – значение дирекционного угла, полу-
ченное из геометрического ориентирования; q Mорi . m2
Если разность f больше допустимой величины, но меньше 3 [13, п. 163], то за окончательное значение следует принимать результаты гироскопического ориентирования. Если же f превышает 3 , то необходимо провести дополнительное ориентирование.
4. СОСТАВЛЕНИЕ ПРОЕКТА И ОЦЕНКА ТОЧНОСТИ ОПОРНОЙ ВЫСОТНОЙ СЕТИ
Для создания надежного высотного обоснования на новом горизонте необходимо описать последовательность передачи отметки Z с поверхности на последний пункт на границе шахтного поля, провести исследования вертикальных съемок, рассчитать погрешность передачи отметки Z на удаленном пункте K. При составлении проекта следует учесть требования инструкции к точности верти-
44

кальной соединительной съемки по стволу [13], вертикальной съемки по горизонтальным горным выработкам, т.е. в выработках с углом наклона менее 5 (геометрическое нивелирование) и по наклонным выработкам, т.е. в выработках с углом наклона 5 и более (тригонометрическое нивелирование), описать методику производства этих съемок, инструментарий, способы нивелирования, контроль на станциях. Поэтому для принятия оптимальных решений по вертикальным съемкам в курсовом проекте необходимо:
–оценить точность хода геометрического нивелирования;
–оценить точность хода тригонометрического нивелирования;
–по заданной точности высотного положения конечного пункта выбрать нивелир и методику нивелирования;
–выполнить предрасчет погрешности координаты Z конечного пункта.
Отметим, что первые три пункта выполняются для параметров, заданных руководителем курсового проектирования, последний пункт – для своих исходных данных.
4.1. Оценка точности хода геометрического нивелирования
Для оценки точности хода геометрического нивелирования необходимо оценить предельную ошибку отметки конечного пункта висячего нивелирного хода. Длина хода задается согласно варианту:
LK 3 N , где N – номер варианта. Среднее расстояние от нивели-
ра до рейки составляет 20; 40; 60; 90; 110; 140 м. Нивелирование выполняется из середины. Характеристики нивелира следует взять из табл. 4.1.
Ошибка высотного положения конечного пункта висячего хода геометрического нивелирования M KZ (относительно исходного ре-
пера) определяется следующим образом:
M KZ mо 2n , |
(4.1) |
где mо – ошибка отсчета по рейке, мм; n – количество станций, зависит от периметра хода и расстояния от нивелира до рейки.
45

Таблица 4 . 1 Характеристики отечественных и зарубежных нивелиров
№ |
Марка |
Увеличение трубы V, |
Цена деления |
Изготовитель |
|
п/п |
нивелира |
крат |
уровня τ, …" |
||
|
|
Оптические нивелиры |
|
|
|
1 |
Н05 |
42 |
10 |
|
|
2 |
Н1 |
49 |
10 |
|
|
3 |
Н2 |
40 |
10 |
Россия |
|
4 |
Н3 |
30 |
15 |
||
5 |
Н3К |
30 |
0,1 |
|
|
6 |
Н10 |
23 |
45 |
|
|
7 |
Н10КЛ |
20 |
0,5 |
|
|
8 |
Ni002 |
40 |
0,05 |
|
|
9 |
Ni007 |
31,5 |
0,15 |
Германия |
|
10 |
Ni030 |
25 |
30 |
||
11 |
Ni025 |
25(28) |
0,5 |
|
|
12 |
Ni050 |
18 |
8 |
|
|
13 |
Ni-А3 |
40(50) |
0,05 |
|
|
14 |
Ni-А1 |
40,32,24 |
10 |
Венгрия |
|
15 |
Ni-В3 |
28,32 |
0,1 |
||
|
|||||
16 |
Ni-Д1 |
16 |
0,5 |
|
|
|
|
Цифровые нивелиры |
|
|
|
17 |
SOKKIA SDL50 |
28 |
10 |
Япония |
|
18 |
SOKKIA SDL30 |
32 |
10 |
||
|
|||||
19 |
Leica SPRINTER 50 |
24 |
10 |
Австрия |
|
20 |
Trimble DiNi 0.7 |
26 |
8 |
Германия |
Ошибка отсчитывания по рейке определяется по формуле
m |
|
l |
10000 0,01 2 , |
(4.2) |
|
|
|||||
о |
|
V 2 |
|
где l – длина визирного луча, м; τ – цена деления уровня, …"; V – увеличение зрительной трубы, крат.
Результаты вычислений сводят в табл. 4.2.
По результатам оценки нужно построить график зависимости ошибки высотного положения конечного пункта хода (M KZ ) от
длины визирного луча и сделать вывод о результатах проведенного исследования.
46
Таблица 4 . 2
Определение ошибки высотного положения конечного пункта в зависимости от расстояния от нивелира до рейки
Длина визирного луча l, м |
n |
L K |
|
mo , мм |
M KZ , мм |
2l |
|
||||
|
|
|
|
|
|
1 |
2 |
|
3 |
4 |
|
|
|
|
|
|
|
4.2. Оценка точности хода тригонометрического нивелирования
Для оценки точности хода тригонометрического нивелирования необходимо также оценить предельную ошибку отметки конечного пункта висячего нивелирного хода. Однако при тригонометрическом нивелировании вертикальные углы измеряются теодолитом. Выбор инструмента необходимо обосновать. Число сторон n составляет 16, средняя наклонная длина стороны 20 м. Высота инструмента и высота сигнала измеряются с точностью ±2 мм (mv = mi = 2 мм). Превышения определяются в прямом направлении. Оценку точности необходимо произвести для углов наклона от 5 до60 с шагом в 5 .
В этом случае ошибка высотного положения конечного пункта висячего хода тригонометрического нивелирования определяется по формуле
M |
KZ |
m |
Z |
n |
, |
(4.3) |
|
|
2 |
|
|
||
|
|
|
|
|
|
где mZ – ошибка определения одного превышения, м; n – число
сторон.
Ошибка определения одного превышения вычисляется по известной формуле теории ошибок:
m |
|
m S cos |
2 |
m |
sin 2 m2 |
m2 |
, |
(4.4) |
|
Z |
|
|
|
|
S |
v |
i |
|
|
|
|
|
|
|
|
|
|
|
|
где m – ошибка измерения угла наклона визирного луча; S – длина наклонного луча визирования; δ – угол наклона визирного луча;
47
mS – ошибка измерения наклонной линии, вычисляется по формуле (3.10); mv – ошибка визирования; mi – ошибка определения высоты
инструмента.
Ошибка определения угла наклона визирного луча определяется по формуле
m |
1 |
mо2 |
mvg2 |
m2 , |
(4.5) |
|
2 |
|
|
|
|
где mо – ошибка отсчета по рейке; mvg – ошибка визирования гори-
зонтальной сеткой нитей; m – ошибка приведения оси уровня
в горизонтальное положение.
Данные ошибки вычисляются по следующим формулам:
m |
t |
|
, m |
|
b |
, |
m 0,2 , |
(4.6) |
o |
2 |
6 |
vg |
|
2 fоб |
|
|
|
|
|
|
|
|
||||
где t – цена деления шкалы по отсчитываемому кругу; b – толщина сетки нитей, мм; fоб – допустимое расстояние объектива, мм; τ – цена деления уровня.
Вычисления сводят в табл. 4.3.
Таблица 4 . 3
Определение ошибки положения конечного пункта по высоте в зависимости от угла наклона визирного луча
Угол наклона |
m S cos |
2 |
m sin 2 |
mZ , мм |
MK |
, мм |
|
луча , …º |
|
|
|
S |
|
|
Z |
|
|
|
|
|
|
||
1 |
|
2 |
|
3 |
4 |
|
5 |
|
|
|
|
|
|
|
|
В результате вычислений нужно построить график зависимости ошибки отметки конечного пункта хода тригонометрического нивелирования от угла наклона визирного луча и сделать вывод о проделанной работе.
48
4.3.Выбор нивелира и методики нивелирования по заданной точности конечного пункта
Исходными данными для выбора нивелира будут являться длина хода геометрического нивелирования и заданная ошибка определения высотной отметки конечного пункта K. Длина хода берется как двойная длина хода из курсового проекта. В соответствии с нормативными требованиями ошибка высотной отметки конечного пункта определяется по формуле
M KZ 50 L 4 .
4 .
При выборе нивелира используем метод последовательного приближения. Сначала выбирают и обосновывают длину визирного луча l, потом определяют количество станций из соотношения
n 2Ll , где L – длина всего хода. По методике нивелирование про-
изводят из середины.
Далее вычисляют ошибку отсчета по рейке:
m |
|
M KZ |
. |
(4.7) |
|
||||
o |
2n |
|
||
|
|
|
||
Затем рассчитывают технические характеристики нивелира согласно приближенным формулам из работ [5, 6]:
V 0,7 |
l |
, |
mo |
|
|
|
|
. |
(4.8) |
||
m |
0,0007l |
||||
|
o |
|
|
|
|
Согласно рассчитанным характеристикам делают вывод о возможности использования ранее выбранного нивелира (см. п. 4.1). По вычисленным значениям цены деления уровня и увеличения трубы V из табл. 4.1 можно выбрать другой нивелир. Если нет нивелира с рассчитанными и V, то выбирают другую длину визирного луча l и заново повторяют расчет.
Вкачестве контроля производят проверку. По формулам (4.2)
и(4.1) вычисляют ошибку отметки конечного пункта, сравнивают с заданной ошибкой и делают вывод о проделанной работе.
49

4.4. Предрасчет погрешности координаты Z конечного пункта высотной опорной сети
Погрешность отметки Z конечного пункта M KZ зависит от ошибки вертикальной соединительной съемки по стволу Mшх , ошибок хода геометрического Mг и тригонометрического M тр нивелирования и определяется по формуле
M |
KZ |
M 2 |
M 2 |
М2 . |
(4.9) |
|
шх |
г |
тр |
|
Если вертикальная соединительная съемка по стволу проведена по рекомендации инструкции [13, п. 190–192], то
Мшх |
0,0003Н |
, |
(4.10) |
|
4 |
|
|
где Н – глубина ствола, м.
Всвязи с тем что по горизонтальным выработкам инструкцией
[4]рекомендуется проводить опорную высотную сеть техническим нивелированием, ошибка геометрического нивелирования
Мг |
50 L |
, |
(4.11) |
|
4 |
||||
|
|
|
где L – двойная длина геометрического хода, км.
В выработках с углами наклона 5 и более рекомендуется прокладывать ход тригонометрическим нивелированием, поэтому ошибка тригонометрического нивелирования
Мтр |
100 L |
, |
(4.12) |
|
4 |
|
|
где L – двойная длина тригонометрического хода, км. Примечание: значения Мшх , Мг и Мтр вычисляются в мил-
лиметрах. В формулах (4.11) и (4.12) ошибки геометрического и тригонометрического нивелирования рассчитываются через невязки для соответствующего класса нивелирования. Удаленная
50