

11 - ТАУ
.docxКонтрольная работа №1
Вариант 11
Тема 1
Вопрос 2
Что такое автоматическое регулирование?
При управлении техническими объектами часто целью управления является поддержание заданного закона ее изменения управляемой величины или заданного закона ее изменения в условиях влияния на объект возмущающих воздействий. Такой частный случай автоматического управления принято называть автоматическим регулированием.
Вопрос 7
Что характеризует коэффициент статизма?
Коэффициент статизма характеризует точность статической системы
Тема 2
Вопрос 4
Что понимается под коэффициентом передачи дифференцирующего и интегрирующего звеньев соответственно?
Под коэффициентом передачи дифференцирующего звена условно понимают коэффициент К, имеющий размерность времени и равный отношению величины на выходе к постоянной скорости изменения величины на входе.
Коэффициент передачи К интегрирующего звена условно определяется как отношение постоянной скорости изменения на выходе к значению величины на входе.
Вопрос 10
Какое звено при любой частоте создает отставание по фазе величины на выходе относительно на входе на угол π/2?
Интегрирующее звено
Тема 3
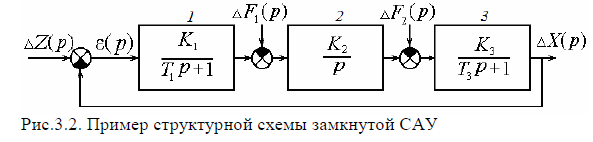
Вопрос 1а


Вопрос 2в


Задача 1.1 б


Определим отклонение:


Генератор независимого возбуждения можно представить как в виде одного типового динамического звена, так и в виде нескольких звеньев включенных последовательно. Рассмотрим генератор в виде нескольких динамических звеньев. Передаточную функцию для генератора – одного звена можно будет получить перемножением передаточных функций отдельных его составляющих.
Обмотка возбуждения. Дифференциальное уравнение на основании второго закона Кирхгофа для цепи возбуждения генератора имеет вид:
Lв (dIв / dt) + RвIв = Uэу
где Lв – индуктивность обмотки возбуждения; Iв – ток в обмотке возбуждения (выходная величина); Rв – активное сопротивление обмотки возбуждения; Uэу – напряжение на обмотке возбуждения (входная величина).
Разделим уравнение на произведение RвIв, в результате получим:
(Lв dIв) / (RвIв dt) + (RвIв) / (RвIв) = Uэу / (RвIв)
Выполним сокращения и перейдем к операторной форме записи:
(Lв / Rв) p + 1 = Uэу / (RвIв)
где p – оператор Лапласа.
Умножим обе части выражения на Iв и приведем уравнение к стандартному виду:
(Tов p + 1) Iв = Uэу kов
где Tов – постоянная времени цепи возбуждения генератора, Tов = (Lв / Rв); kов – коэффициент передачи обмотки возбуждения, kов = (1 / Rв).
Передаточная функция обмотки возбуждения, как апериодического звена первого порядка, имеет вид:
wов(p) = kов / (Tов p + 1).
Якорь генератора – безинерциальное звено (в исходных данных на курсовую работу постоянная времени для цепи якоря равна нулю). На основании известной характеристики генератора независимого возбуждения (рис. 4.1) можно определить коэффициент передачи для цепи якоря.
Если из анализа работы САР известно, что ток возбуждения и напряжение на якоре в процессе работы мало отклоняются от нулевых начальных условий, то можно воспользоваться методом графической линеаризации.
На характеристике отмечается рабочая точка с координатами (Iв0, Uг0), которые соответствуют нулевым начальным условиям. Через эту точку проводится касательная к криволинейной характеристике генератора. Тангенс угла наклона данной касательной и будет являться коэффициентом передачи якоря генератора.
Таким образом, на основании метода графической линеаризации имеем:
Uг = Iв tg g = kг Iв
где Uг – напряжение на зажимах якоря генератора (выходная величина);
g – угол наклона касательной к характеристике генератора в рабочей точке; kг – коэффициент передачи генератора.
Передаточная функция якоря генератора как безинерционного звена будет иметь вид:
wг(p) = kг.


Рис.2.1
Определим ток в цепи:
I=U1/(R+1/Ср)
U2=I/Ср, выразим ток:
I=U2Ср
U1/(R+1/Ср) = U2Ср
U2/U1=1/(RСр+1)
Тип звена – апериодический

![]()

Задача 3.3в
![]()

Определим передаточную функцию:

Задача 3.6в



Решение

Коэффициент передачи равен: 20*Кр/20*Кр=1
Контрольная работа №2
Тема 4
Вопрос 4
Перечислите и напишите алгоритмы регулирования различных типов регуляторов
Для регулирования объектами управления, как правило, используют типовые регуляторы, названия которых соответствуют названиям типовых звеньев:
П-регулятор, пропорциональный регулятор
Передаточная функция П-регулятора: Wп(s) = K1. Принцип действия заключается в том, что регулятор вырабатывает управляющее воздействие на объект пропорционально величине ошибки (чем больше ошибка Е, тем больше управляющее воздействие Y).
И-регулятор, интегрирующий регулятор
Передаточная функция И-регулятора: Wи(s) = К0/s. Управляющее воздействие пропорционально интегралу от ошибки.
Д-регулятор, дифференцирующий регулятор
Передаточная функция Д-регулятора: Wд(s) = К2*s. Д-регулятор генерирует управляющее воздействие только при изменении регулируемой веричины: Y= K2 * dE/dt.
На практике данные простейшие П, И, Д регуляторы комбинируются в регуляторы вида ПИ, ПД, ПИД (см. рис.1):

Рисунок 1 - Виды непрерывных регуляторов
В зависимости от выбранного вида регулятор может иметь пропорциональную характеристику (П), пропорционально-интегральную характеристику (ПИ), пропорционально-дифференциальную характеристику (ПД) или пропорционально-интегральную (изодромную) характеристику с воздействием по производной (ПИД-регулятор).
ПИ-регулятор, пропорционально-интегральный регулятор
ПИ-регулятор представляет собой сочетание П- и И-регуляторов. Передаточная функция ПИ-регулятора:
Wпи(s) = K1 + K0/s.
ПД-регулятор, пропорционально-дифференциальный регулятор
ПД-регулятор представляет собой сочетание П- и Д-регуляторов. Передаточная функция ПД-регулятора:
Wпд(s) = K1 + K2 s.
ПИД-регулятор, пропорционально-интегрально-дифференциальный регулятор ПИД-регулятор представляет собой сочетание П-, И- и Д-регуляторов. Передаточная функция ПИД-регулятора:
Wпид(s) = K1 + K0 / s + K2 s.
Вопрос 9б
Изобразить структурную схему ПД регулятора:

Тема 5
Вопрос 2
В какой части комплексной плоскости располагаются корни характеристического уравнения (полюсы передаточной функции) устойчивой САУ?
В левой плоскости.
Вопрос 5
Можно ли сделать устойчивой САУ, структурная схема которой изображена на рис.1 путем охвата одного из интегрирующих звеньев обратной связью:
а) отрицательной гибкой;
б) положительной гибкой?

Рис.1
Систему можно сделать устойчивой при охвате отрицательной обратной связью.
Тема 6
Вопрос 2
Что понимается под ошибкой управления, временем переходного процесса, перерегулированием и колебательностью?
Статическая ошибка – ошибка регулируемой величины в установившемся режиме.
Время переходного процесса – время когда регулируемая величина выходит в установившееся значение.
Перерегулирование – максимальное отклонение регулируемой величины
Колебательность – количество колебаний.
Вопрос 5
Что понимается под степенью устойчивости?
Степень устойчивости численно равна абсолютному значению действительной части ближайшего к мнимой оси корня (рис. 3).

Рис. 3. К определению степени устойчивости


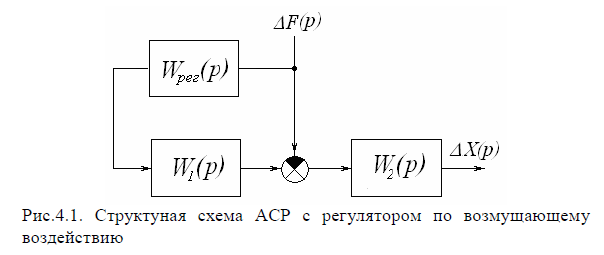


Задача 4.4е



Определим ПФ системы по возмущающему воздействию:

Коэффициент статизма равен 2
Задача 5.3в
С помощью критерия Гурвица оценить устойчивость замкнутых САУ, для которых заданы следующие выражения:

На основании критерия Гурвица можно получить, что для уравнения четвертого порядка, кроме положительности всех коэффициентов, требуется выполнение условия

Система устойчива


характеристическое уравнение имеет вид:


Построим плоскость:



Определим корни:

По виду корней можно сделать вывод что система не устойчива.

Колебательность определим как отношение ординат АЧХ при w=0 и w=wp
m=3.2/3=1.07
Время достижения первого максимума:
t=1/10=0.1 c.