

4 курс 2 семестр / слободян / пз1
.docxПРАКТИЧНЕ ЗАНЯТТЯ №1
ВИЗНАЧЕННЯ НАПРЯМКУ РУХУ ПС
Будь-який рух – відносний. Його швидкість та напрямок залежать від системи відліку. Щодо повітряного середовища ПС рухається з істинною повітряною швидкістю. У літаків вона спрямована майже точно по поздовжній осі НД. Тому, якщо ми розглядатимемо рух щодо повітряного середовища, то кутова величина, що характеризує напрямок переміщення, буде курс повітряного судна.
Курс – це кут у горизонтальній площині між напрямком, прийнятим за початок відліку в точці місцезнаходження повітряного судна, та проекцією на цю площину поздовжньої осі повітряного судна.
Відраховується протягом годинної стрілки в діапазоні від 0 до 360° від прийнятого початку відліку. За початок відліку курсів може бути прийнято північне напрямок істинного, магнітного або опорного меридіанів.
Справжній меридіан є частиною великого кола, заключеного між полюсами Землі та проходить через дану точку земної поверхні. У будь-якій точці, крім полюсів, меридіан має північне та південне напрямки.
Напрямом магнітного меридіана називають напрямок горизонтальної складової вектора напруженості магнітного поля Землі в даній точці.
Напрямок опорного меридіана – це будь-який умовний напрямок горизонтальної площини, прийняте за початок відліку та жорстко пов'язане з
нульовою віссю шкали курсів ідеального курсового гіроскопа. Земний меридіан будь-якої точки маршруту (справжній або магнітний), що збігається з цим напрямком також називають опорним меридіаном.
Залежно від обраної системи відліку отримали назву та застосовувані курси: істинний, магнітний та ортодромічний відповідно (Рис.1).
При вимірі магнітного курсу на ПС чутливий елемент магнітного компасу, крім земного магнетизму, піддається впливу магнітних сил та джерел постійного електричного поля ПС. Тому виміряний курс, званий компасним курсом, що не збігається з магнітним курсом. Умовно вважають, що компасний курс відраховується від деякого іншого напрямку, званого компасним меридіаном.
Усі перелічені початкові напрями відліку курсів, як правило, не збігаються один з одним. Їхнє взаємне становище визначається за допомогою певних кутових виправлень.
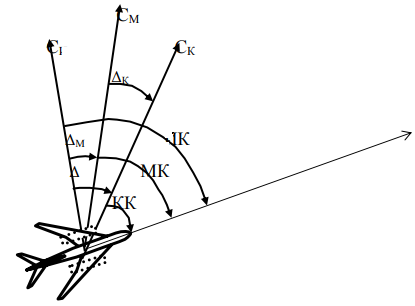
Рис. 1. Істинний (ІК), магнітний (МК) та компасний (КК) курси ПС
Кут, укладений між північним напрямком істинного та магнітного меридіанів, називається магнітним відхиленням ΔМ. Відраховується від північного напрямку істинного меридіана до північного напрямку магнітного меридіана (на схід зі знаком “+”, а на захід “-”, тобто, якщо справжній меридіан розташований лівіше (західніше) магнітного, то магнітне відмінювання позитивне і навпаки, якщо магнітний меридіан розташований ліворуч (західніше) істинного, то магнітне відмінювання негативно).
Кут, укладений між північним напрямом магнітного та компасного меридіанів, називається девіацією ΔК. Відраховується від північного напрями магнітного меридіана до північного напрямку компасного меридіана (на схід зі знаком “+”, а на захід “-”).
Кут, укладений між північним напрямком істинного та компасного меридіанів, називається варіацією Δ. Відраховується від північного напрямку правдивого до північного напрямку компасного меридіана. Варіація дорівнює сумі магнітного відмінювання та девіації Δ = ΔМ + ΔК.
Кут, укладений між північними напрямками опорного та істинного меридіанів, називається азимутальною поправкою Δа.
Кут, укладений між північним напрямом опорного та магнітного меридіанів, називається умовним магнітним відхиленням ΔМу.
Основним принципом використання курсових приладів є їх комплексне застосування, що вимагає переходу від однієї системи виміру курсу до іншого. Щоб уникнути помилок при такому переході, слід використовувати правило обліку поправок. Воно ґрунтується на тому, що, як правило, пілот знімає показання з приладу, а потім послідовно вводить різні виправлення, отримуючи все більш правильне (справжнє) значення.
Правило обліку поправок у навігації: при переході від приладових значень до істинних всі поправки додаються (враховуються зі своїм знаком), а при переході від справжніх значень до приладових усі поправки віднімаються (з врахуванням їх знаків).
Це правило застосовується не тільки до курсів, але і до дорожніх кутів, пеленг, висот, швидкостей і т.п.
Знання та правильне використання цього правила замінює запам'ятовування десятків формул. На прикладі курсів воно показано у вигляді мнемонічної схеми (рис.2). У лівій частині схеми приладові величини, а при переміщенні праворуч вони стають дедалі правдивішими. Необхідно звернути увагу, що ортодромічний курс вважається правдивішим, ніж істинний курс.
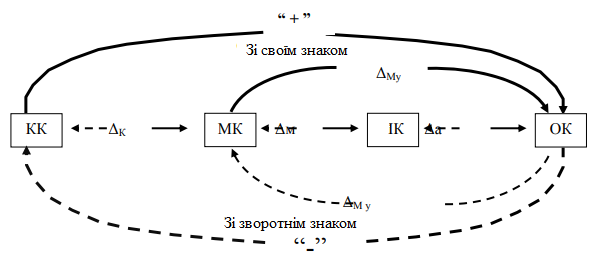
Рис. 2. Правило перекладу курсів
За допомогою цієї схеми можна отримати будь-які формули, наприклад:
ІК = МК + ΔМ;
МК = ІК - ΔМ;
ІК = КК + Δ = КК + ΔМ + ΔК;
КК = ІК - Δ = ІК - ΔМ - ΔК;
МК = КК + ΔК;
КК = МК – ΔК;
ΔК = МК – КК;
ΔМ = ІК - МК;
Δ = ІК - КК;
ОК = ІК + Δа = МК + ΔМу.
Настійно рекомендується використовувати саме правило обліку поправок, а не запам'ятовувати формули або намагатися вивести формули за допомогою рисунку із зображенням меридіанів. Це зазвичай призводить до помилок.
ЗАВДАННЯ
КК = 236°; ΔК = + 5°. Визначити МК.
МК = 236+5 = 241°.
КК = 22°; ΔК = - 2°; ΔМ = - 8°. Визначити МК, ІК.
МК = 22+(-2) = 20°. ІК = 22+(-8)+(-2) = 12°.
КК = 164°; ΔК = + 2°; Δ = + 12°. Визначити МК, ІК, ΔМ.
МК = 164+2 = 166°. ІК = 164+12 = 176°. ΔМ = 176-166 = 10°.
МК = 328°; ΔК = - 4°; ΔМ = + 6°. Визначити КК, ІК, Δ.
КК = 328-(-4) = 332°. ІК = 328+6 = 334°. Δ = 334-332 = 2°.
МК = 78°; ΔМ = + 6°. Визначити ІК.
ІК = 78+6 = 84°.
МК = 8°; ΔК = - 4°; Δ = - 9°. Визначити КК, ІК.
КК = 8-(-4) = 12°. ІК = 12+(-9) = 3°.
МК = 285°; ΔК = + 5°. Визначити КК.
КК = 285-5 = 280°.
МК = 136°; ΔК = - 4°; ΔМ = - 13°. Визначити КК, ІК, Δ.
КК = 136-(-4) = 140°. ІК = 136+(-13) = 123°. Δ = 123-140 = -17°.
КК = 44°; ΔК = + 3°; Δ = - 7°. Визначити МК, ІК.
МК = 44+3 = 47°. ІК = 44+(-7) = 37°.
ІК = 155°; ΔМ = - 11°. Визначити МК.
МК = 155-(-11) = 166°.
ІК= 268°; ΔК = - 4°; ΔМ = - 13°. Визначити КК, МК.
КК = 268-(-13)-(-4) = 285°. МК = 268-(-13) = 281°.
ІК = 331°; ΔК = + 2°; ΔМ = + 5°. Визначити КК, МК, Δ.
КК = 331-5-2 = 324°. МК = 324+2 = 326°. Δ = 331-324 = 7°.
ІК = 16°; ΔК = - 4°; Δ = + 1°. Визначити КК, МК, М.
КК = 16-1 = 15°. МК = 15+(-4) = 11°. ΔМ = 16-11 = 5°.
ІК = 69°; ΔК = - 5°; ΔМ = - 15°. Визначити КК, МК.
КК = 69-(-15)-(-5) = 89°. МК = 69-(-15) = 84°.
МК = 96°; ΔК = + 3°; ΔМ = + 7°. Визначити КК, ІК, Δ.
КК = 96-3 = 93°. ІК = 96+7 = 103°. Δ = 103-93 = 10°.