

ЛАБОРАТОРНА РОБОТА № 2
Поліпшення характеристик короткоперіодичного поздовжнього руху літака

Порядок виконання лабораторної роботи.
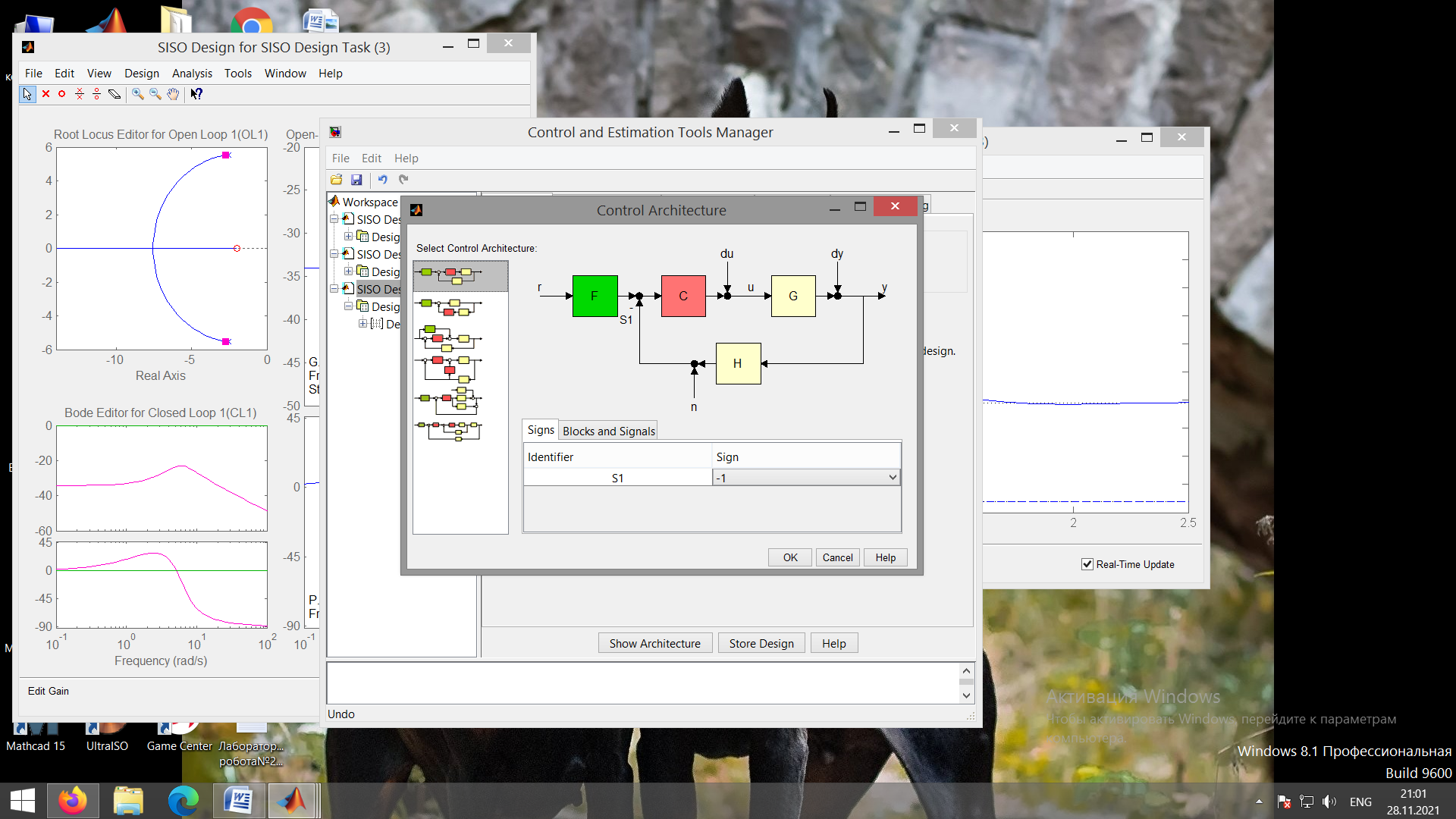
У інтегрованому середовищі Matlab створіть замкнену систему керування літаком, та дослідіть її динамічні властивості використовуючи графічне діалогове вікно SISO Design Tool (SISO – Single Input Single Output) використовуючи знайдену передатню ф-ю в лабораторній роботі №1, а також передатню функцію датчика і корегуючого регулятора, а також задаючого пристрою ( задавача).
Завдання 1
1.1В якості регулятора візьмемо передатню функцію підсилювальної ланки:

К=1
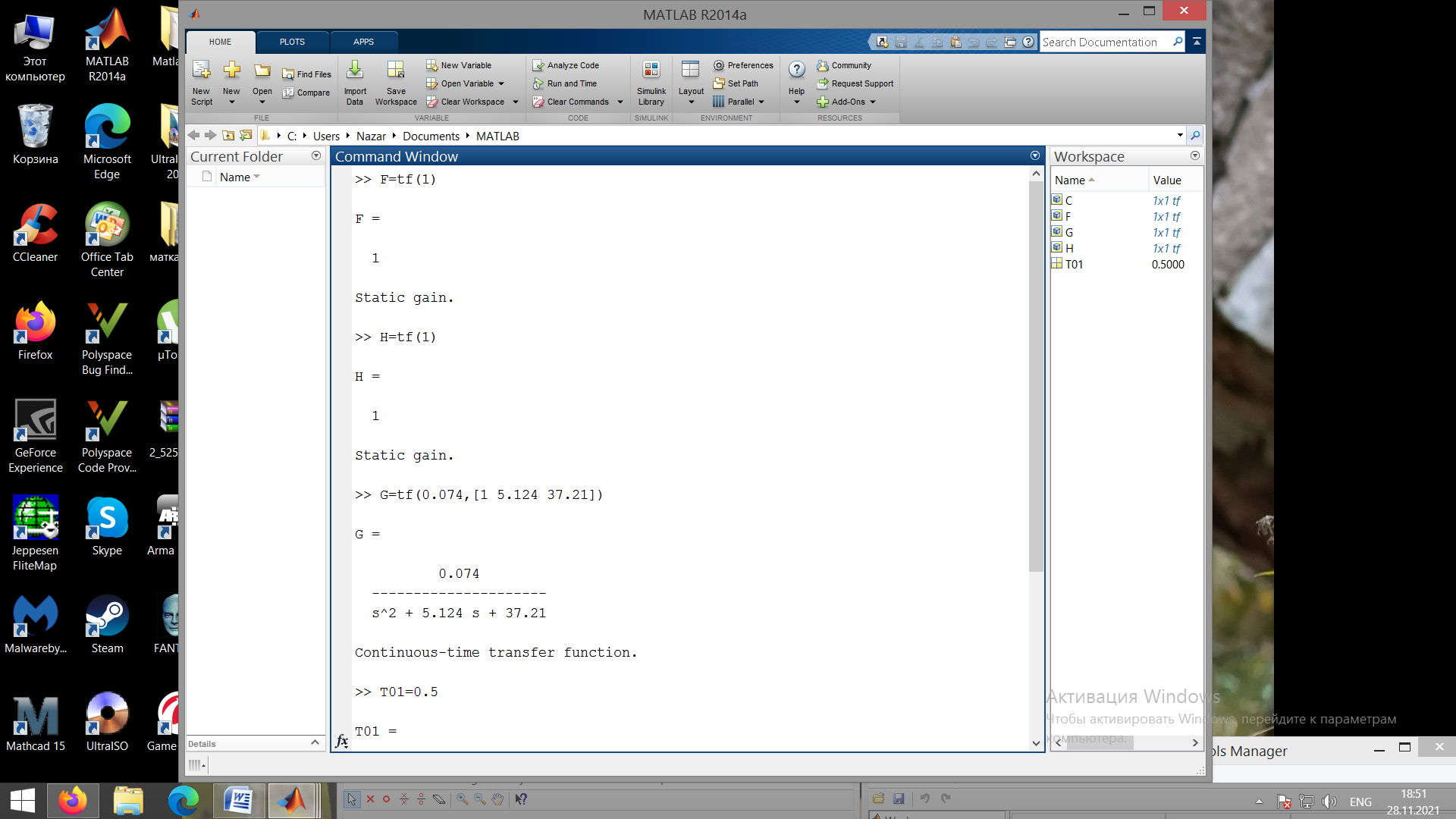
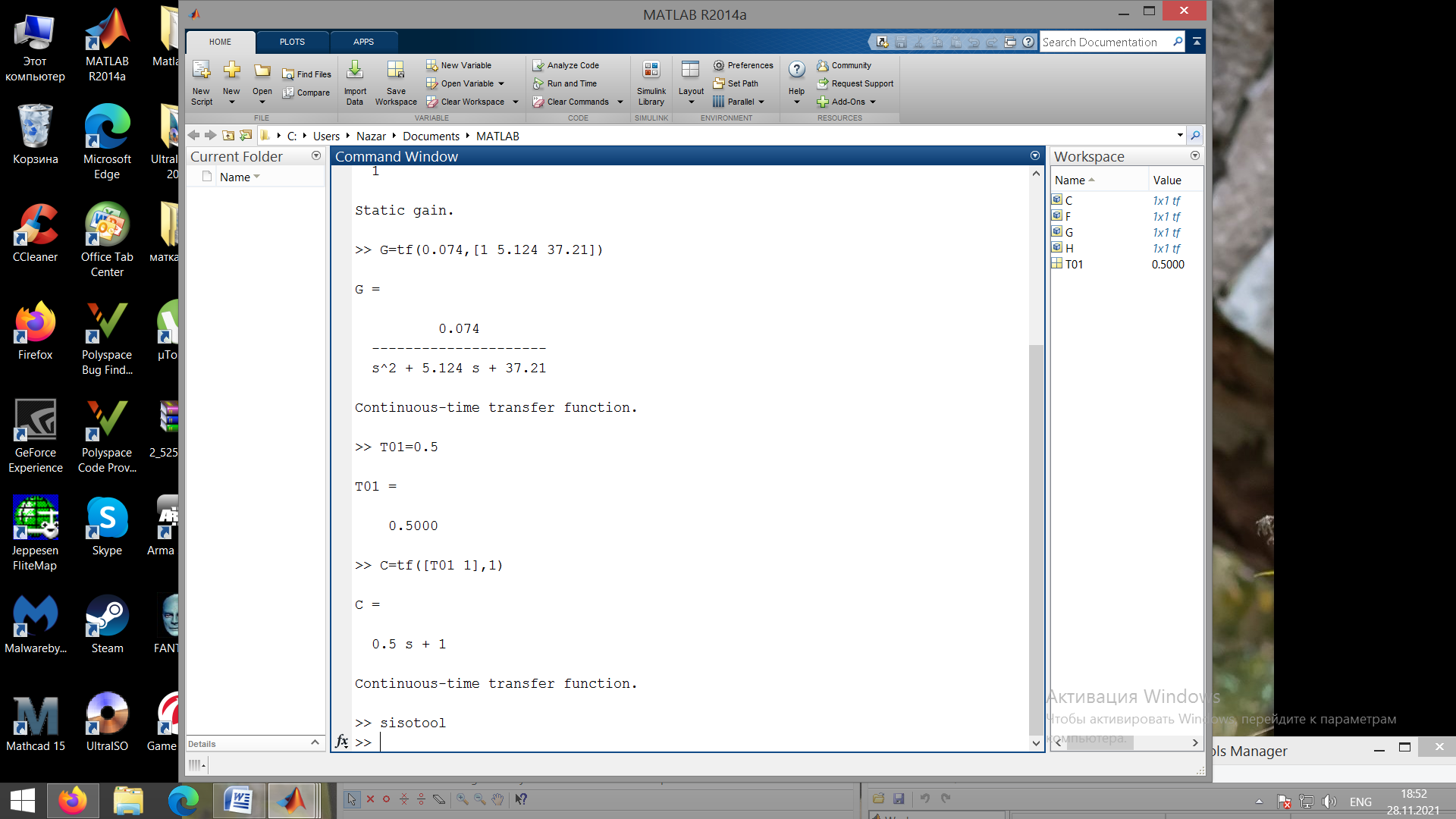
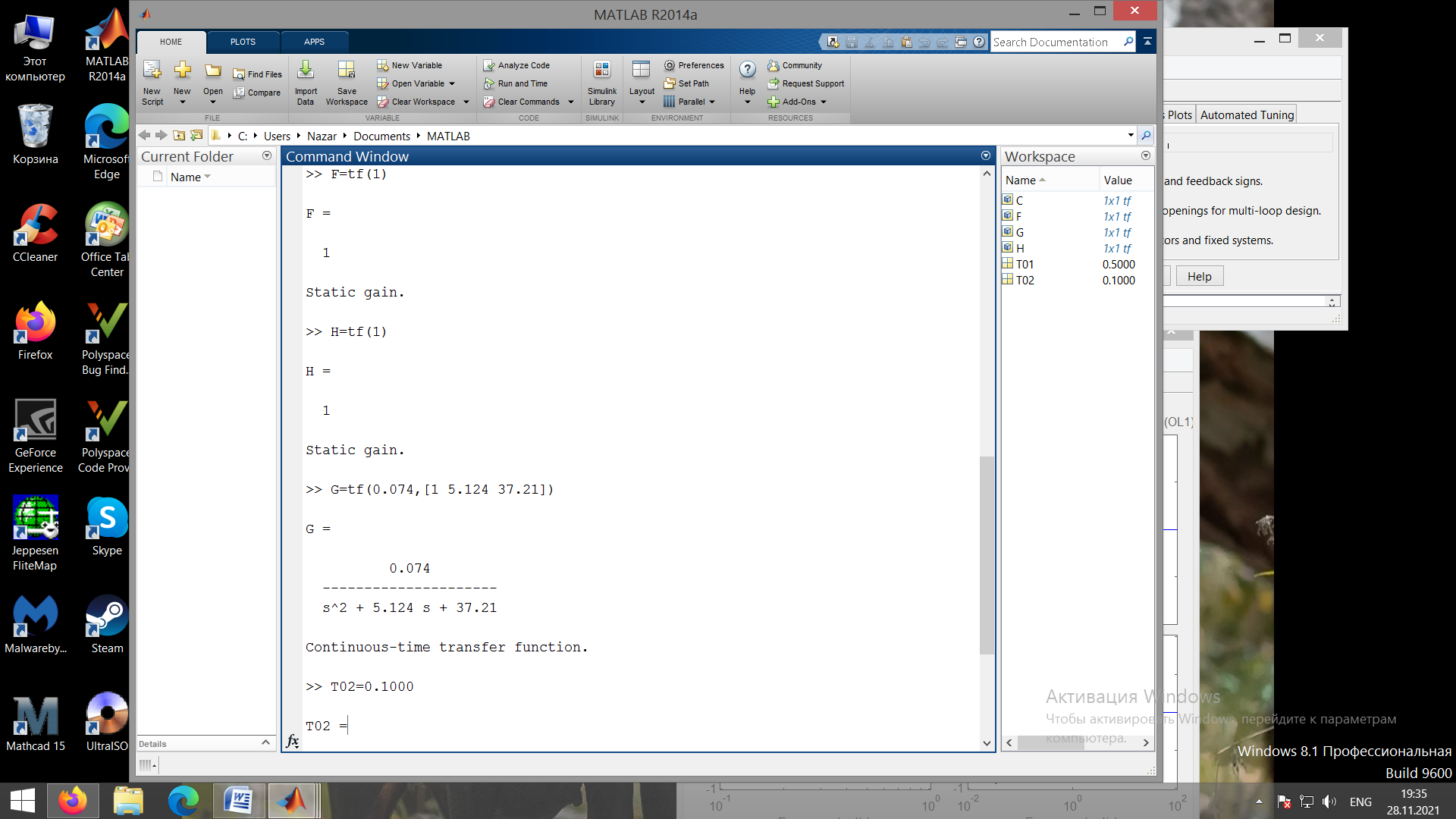
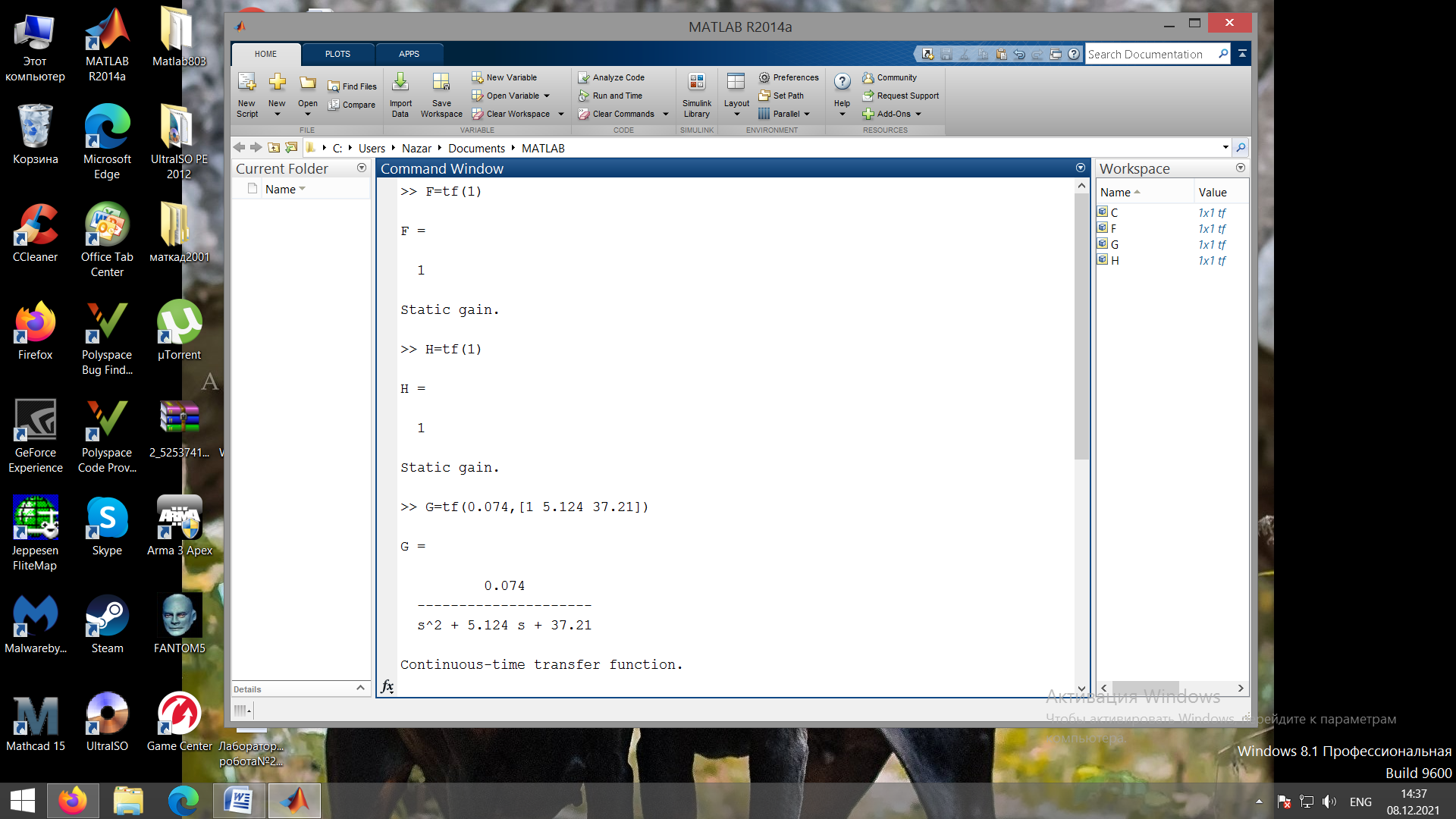
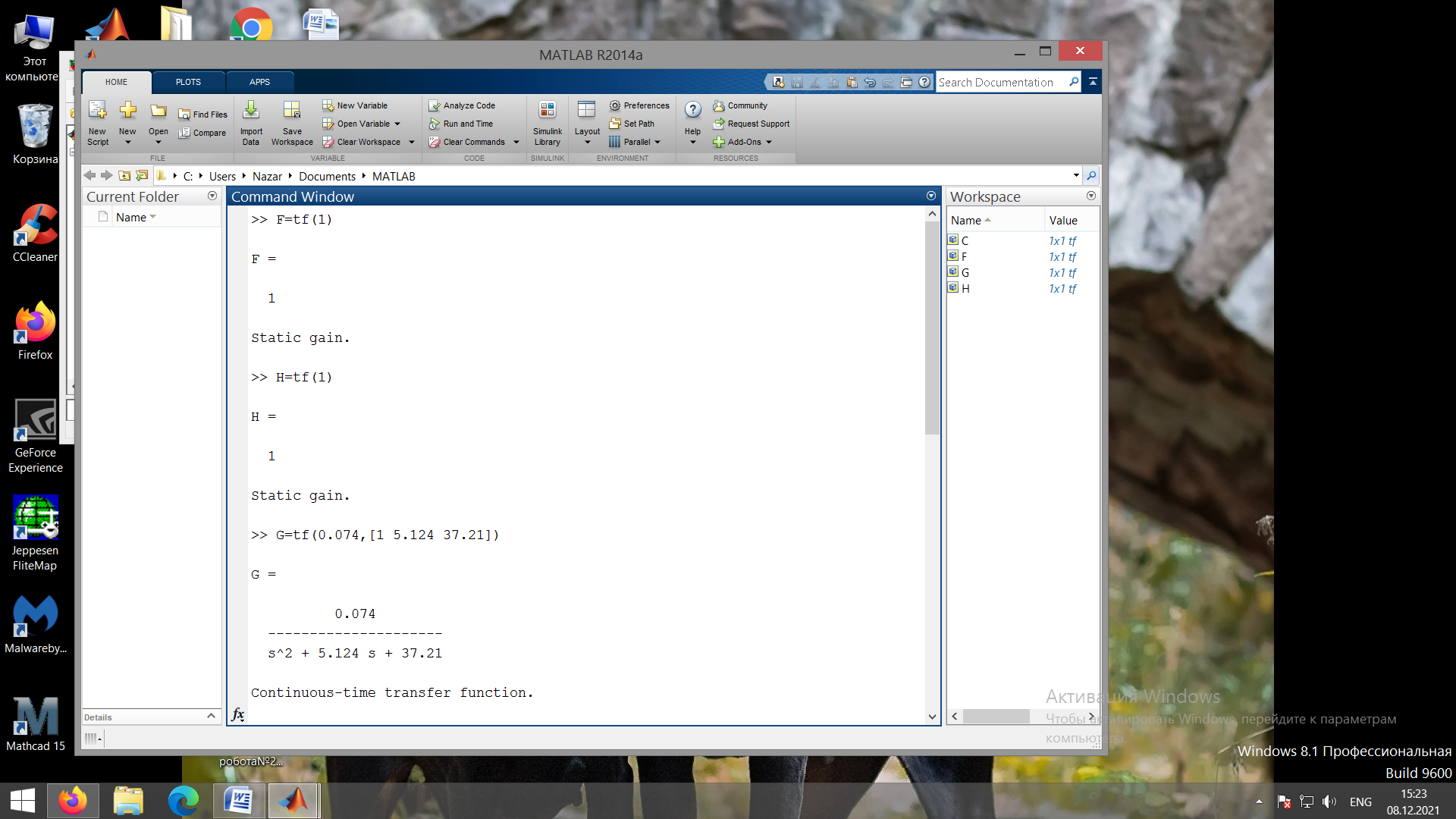
1.2Задамо в командній строці системи Matlab передатні функції елементів АСК ЛА: F=tf (1) – передатня ф-я вхідного сигналу задаючого пристрою; H=tf (1) – передатня ф-я датчика; G=tf(0.074,[1 5.124 37.21]) – передатня ф-я об’єкта керування; C=tf (1) – передатня функція регулятора.
1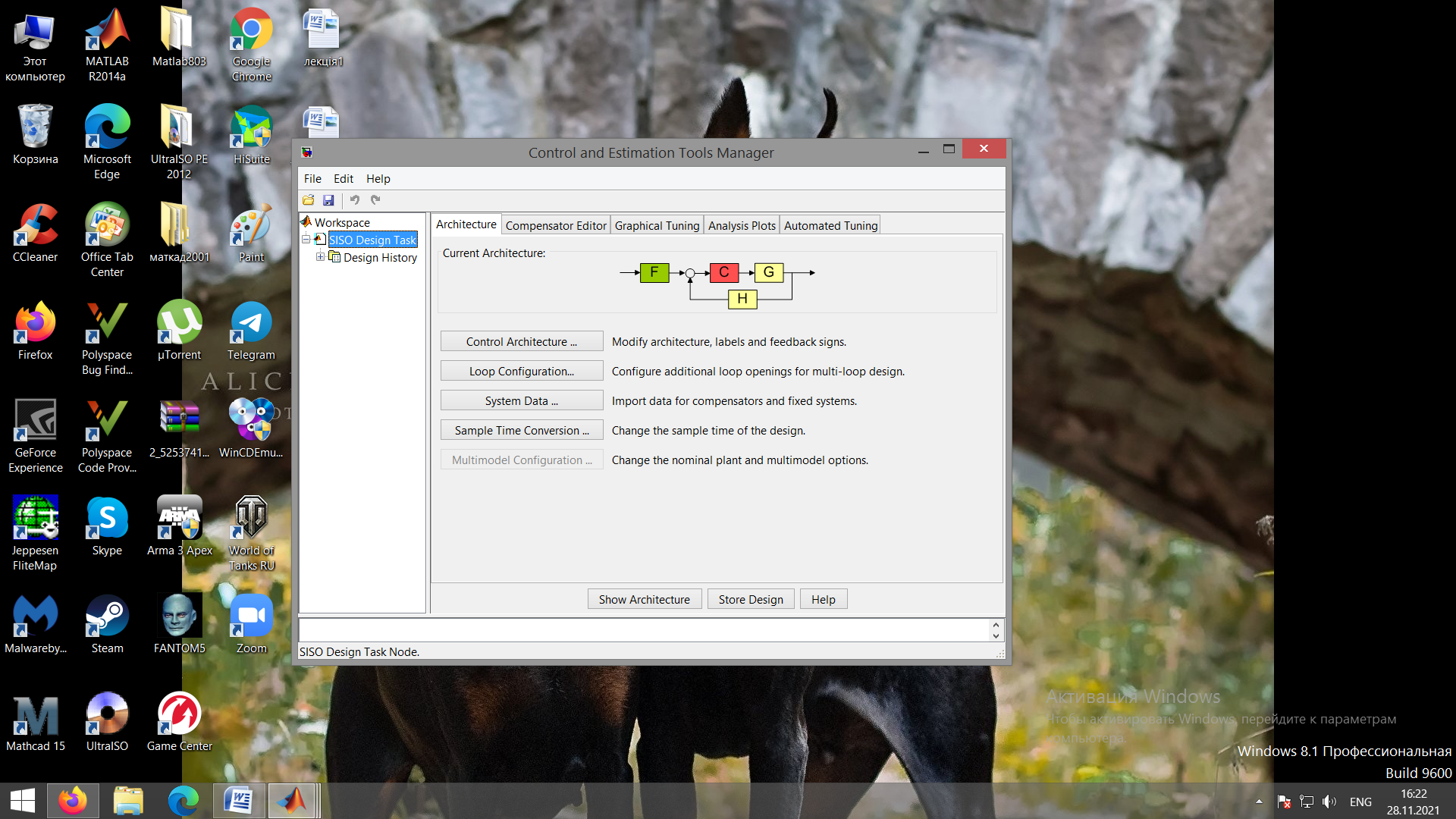
 .3
Запустимо
пакет Control
System
Toolbox
за
допомогою команди “sisotool”.
.3
Запустимо
пакет Control
System
Toolbox
за
допомогою команди “sisotool”.
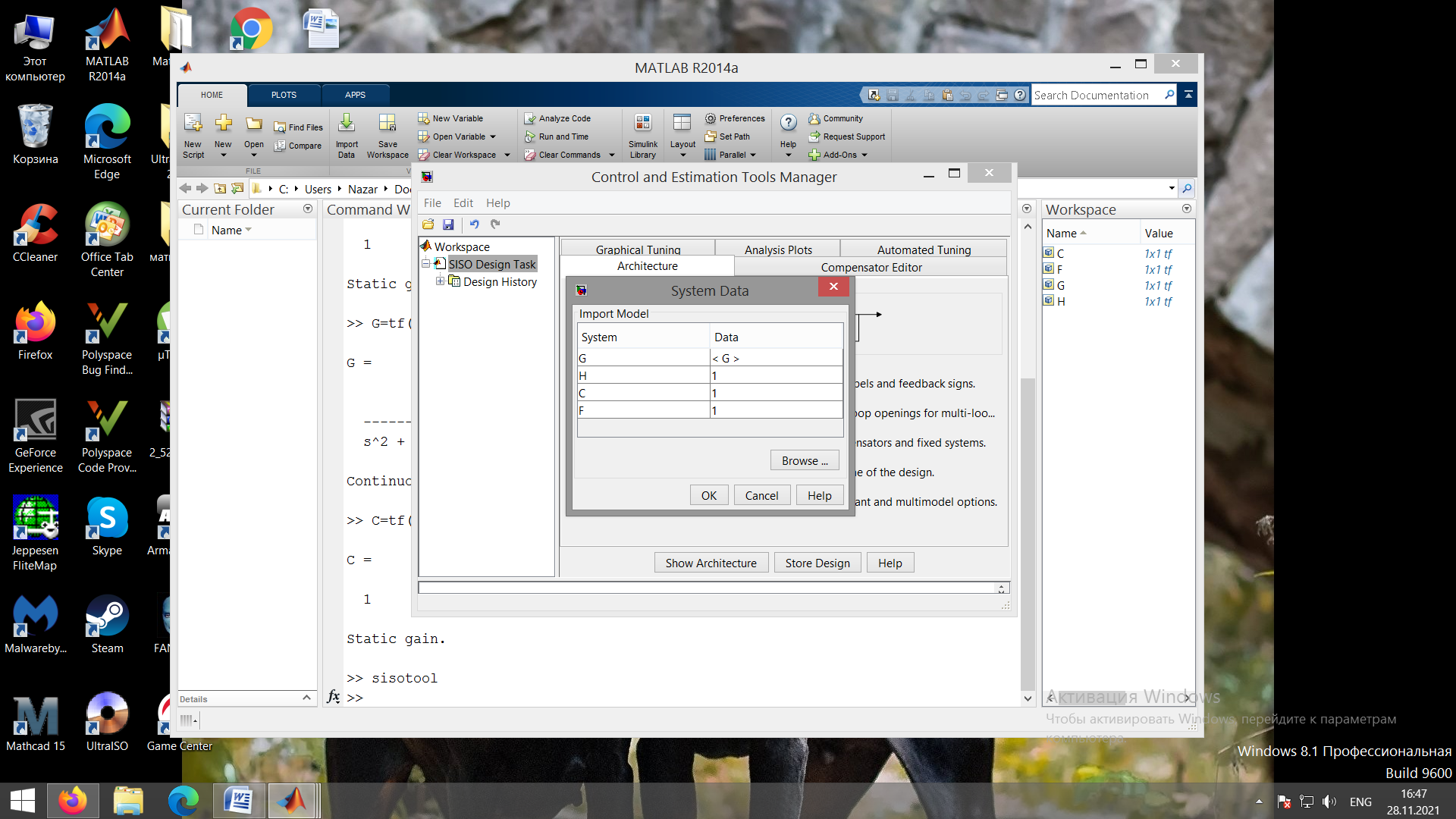
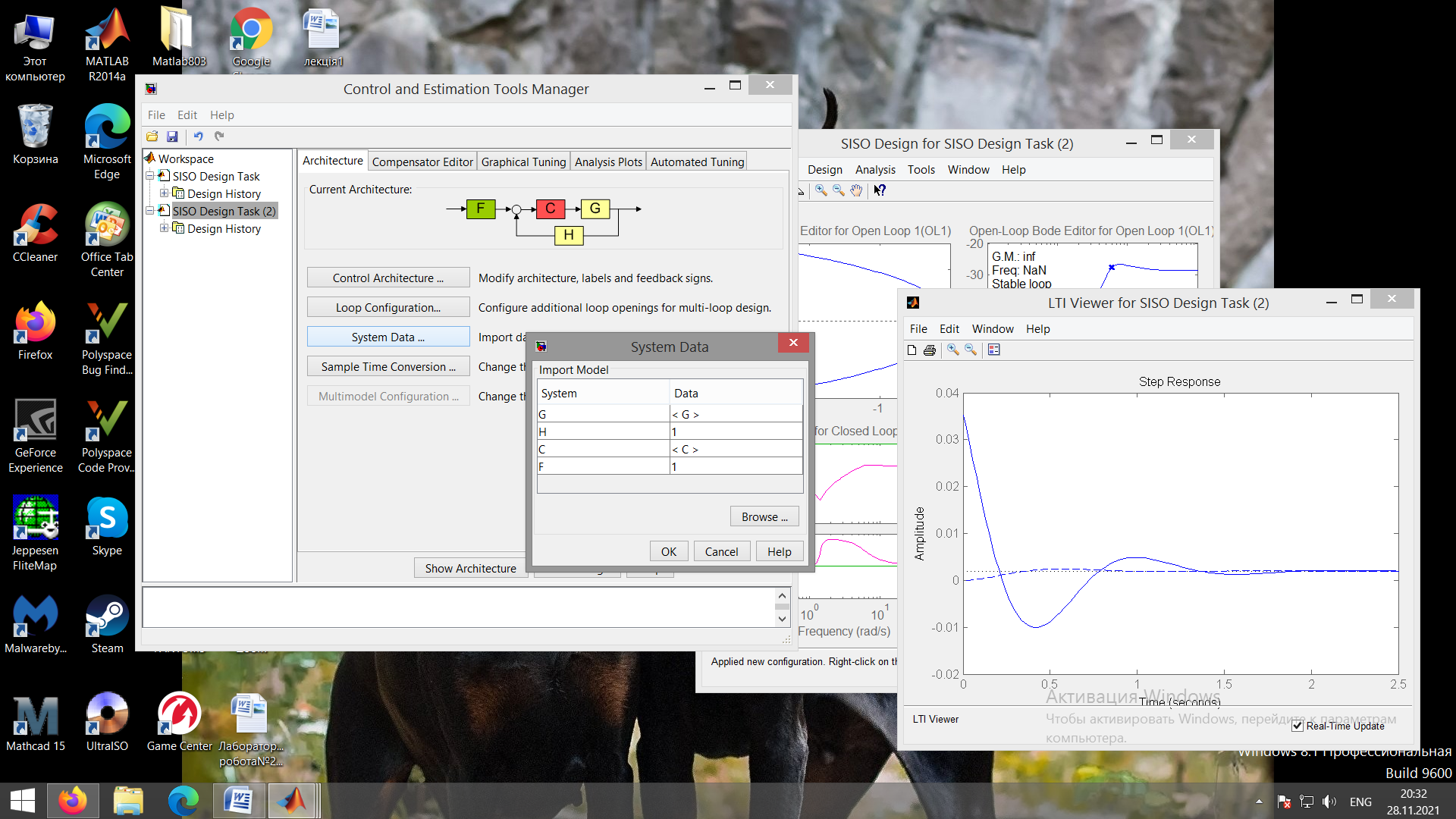
1.4 Задамо значення передатніх функцій які прописані в командному рядку використовуючи вкладку “System Data”
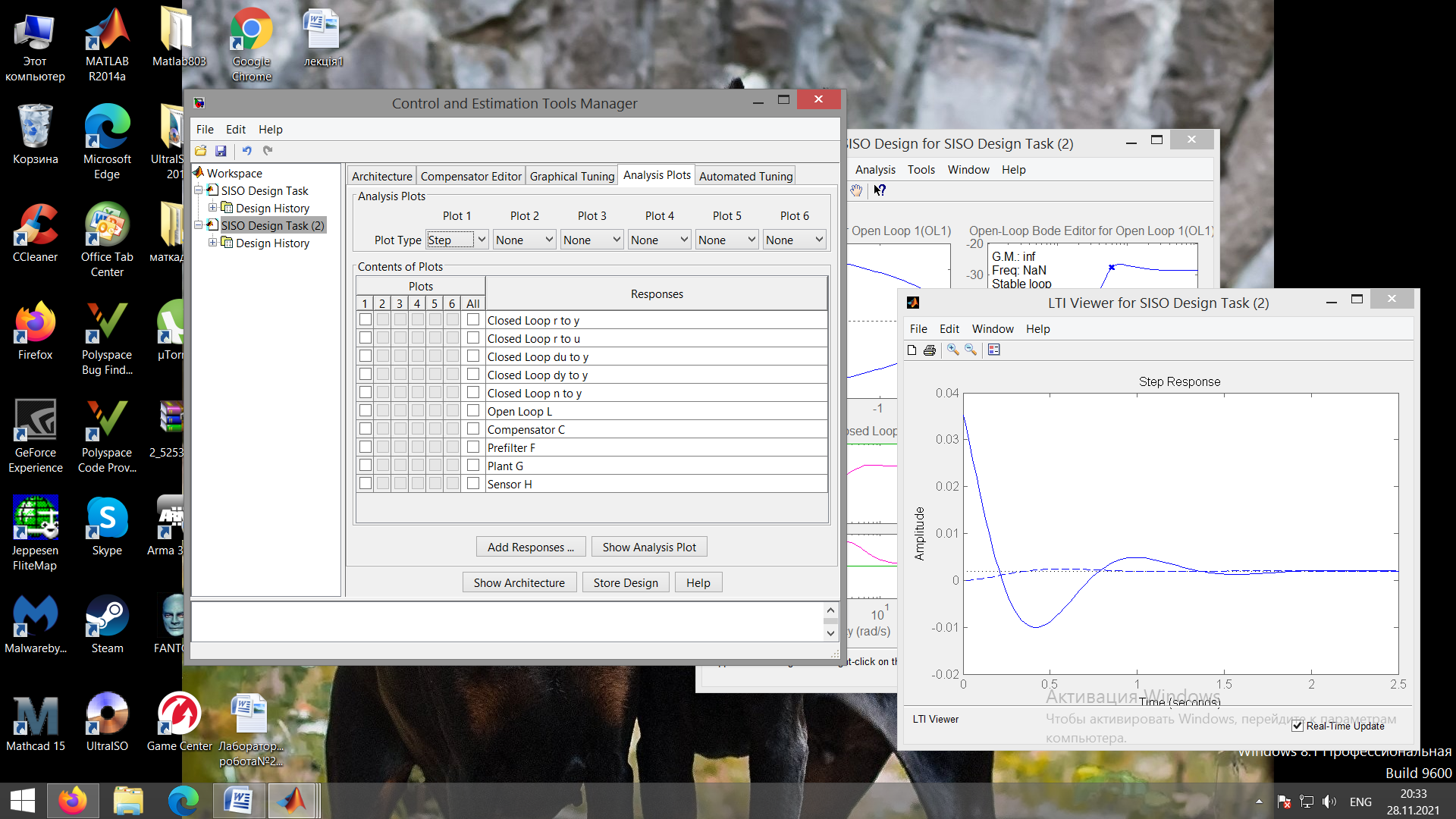
1.5 У вікні “Analysis plots” задамо тип графіку “step”.
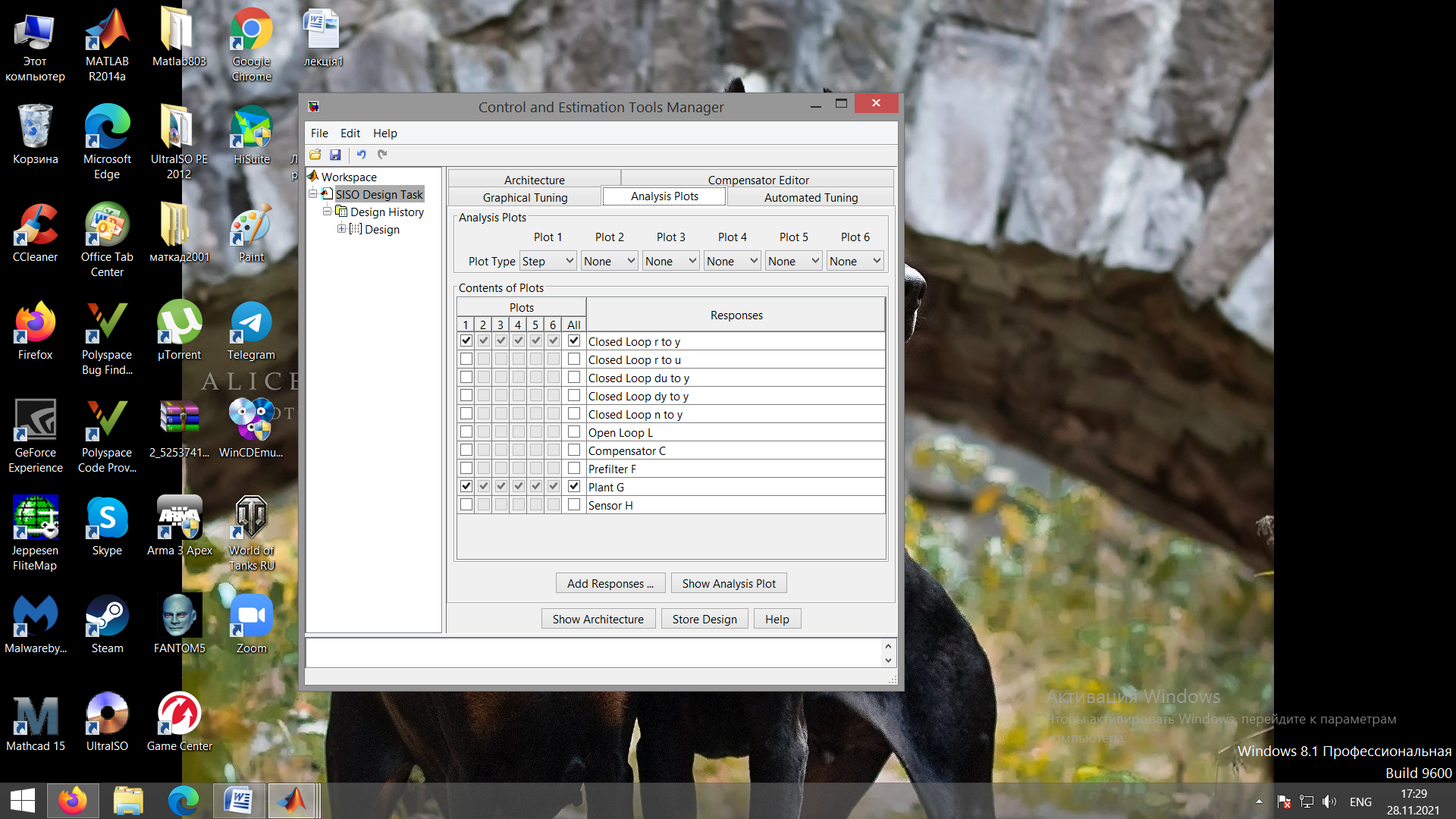
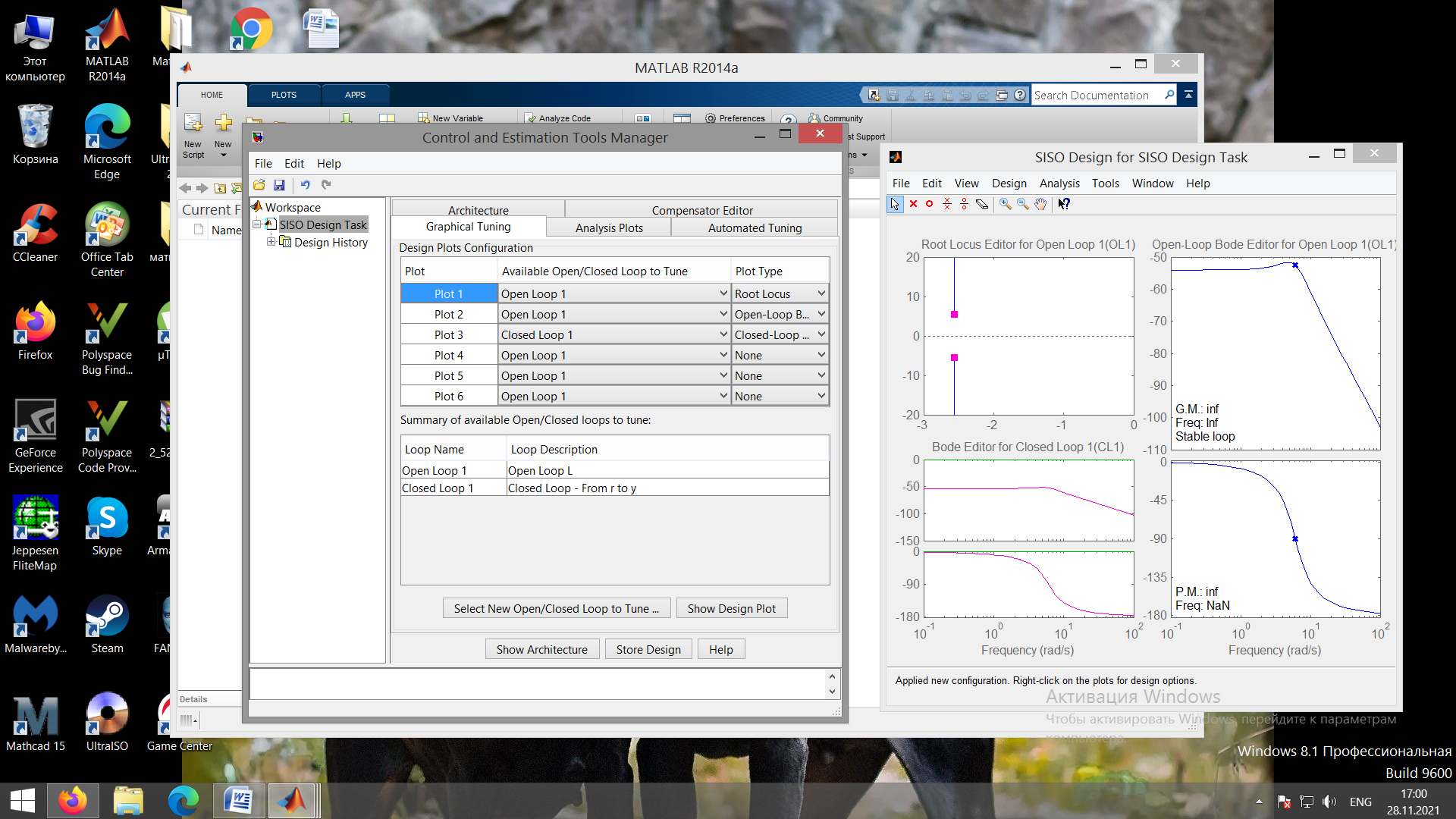
1.6 Встановимо флажки у вікні “Graphical tuning” для “plot 1”.
1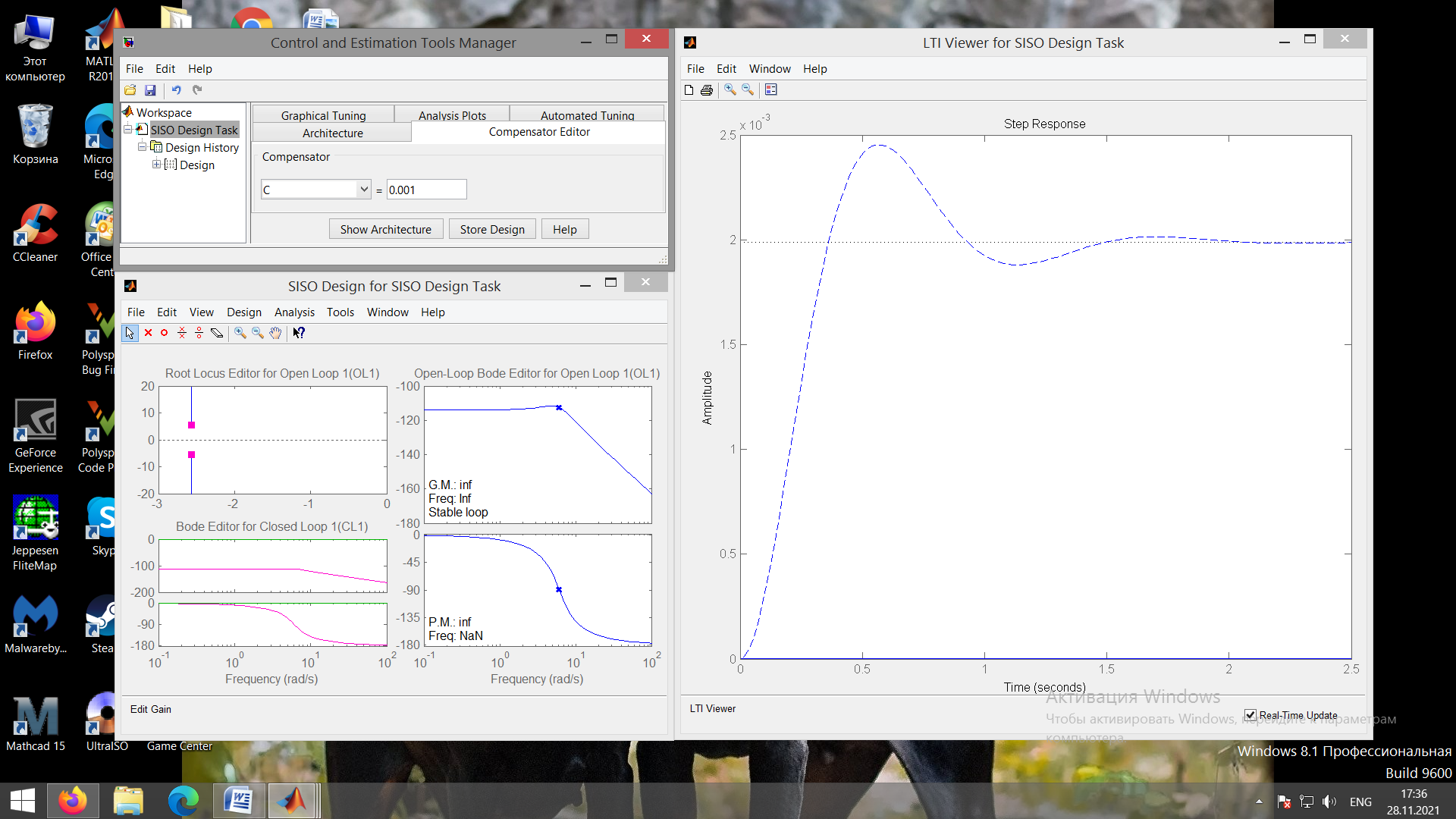 .7
Змінюючи
коефіцієнт
регулятора
отримаємо
значення:
.7
Змінюючи
коефіцієнт
регулятора
отримаємо
значення:
Для С1=0.001
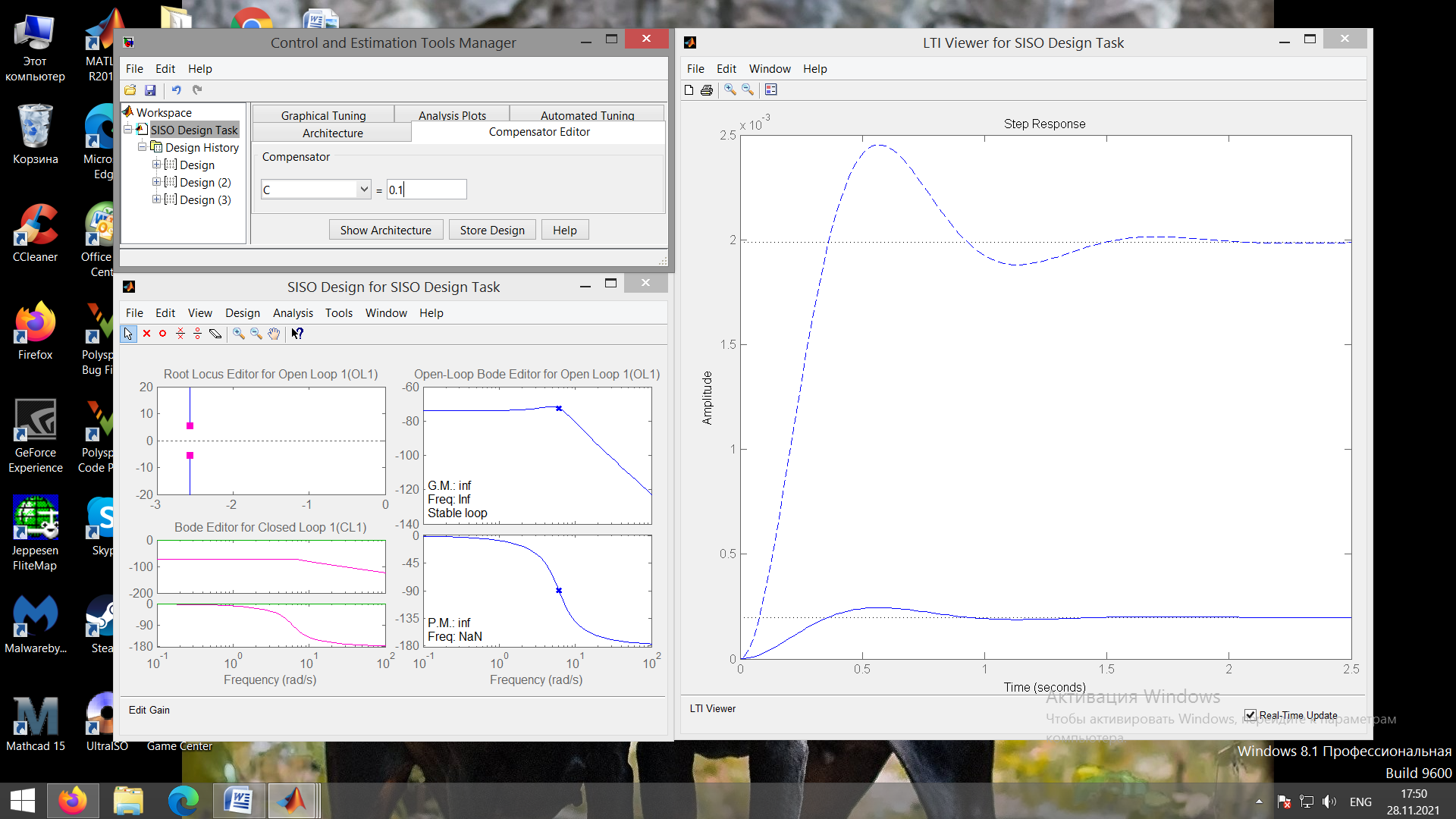
Для C2=0.1
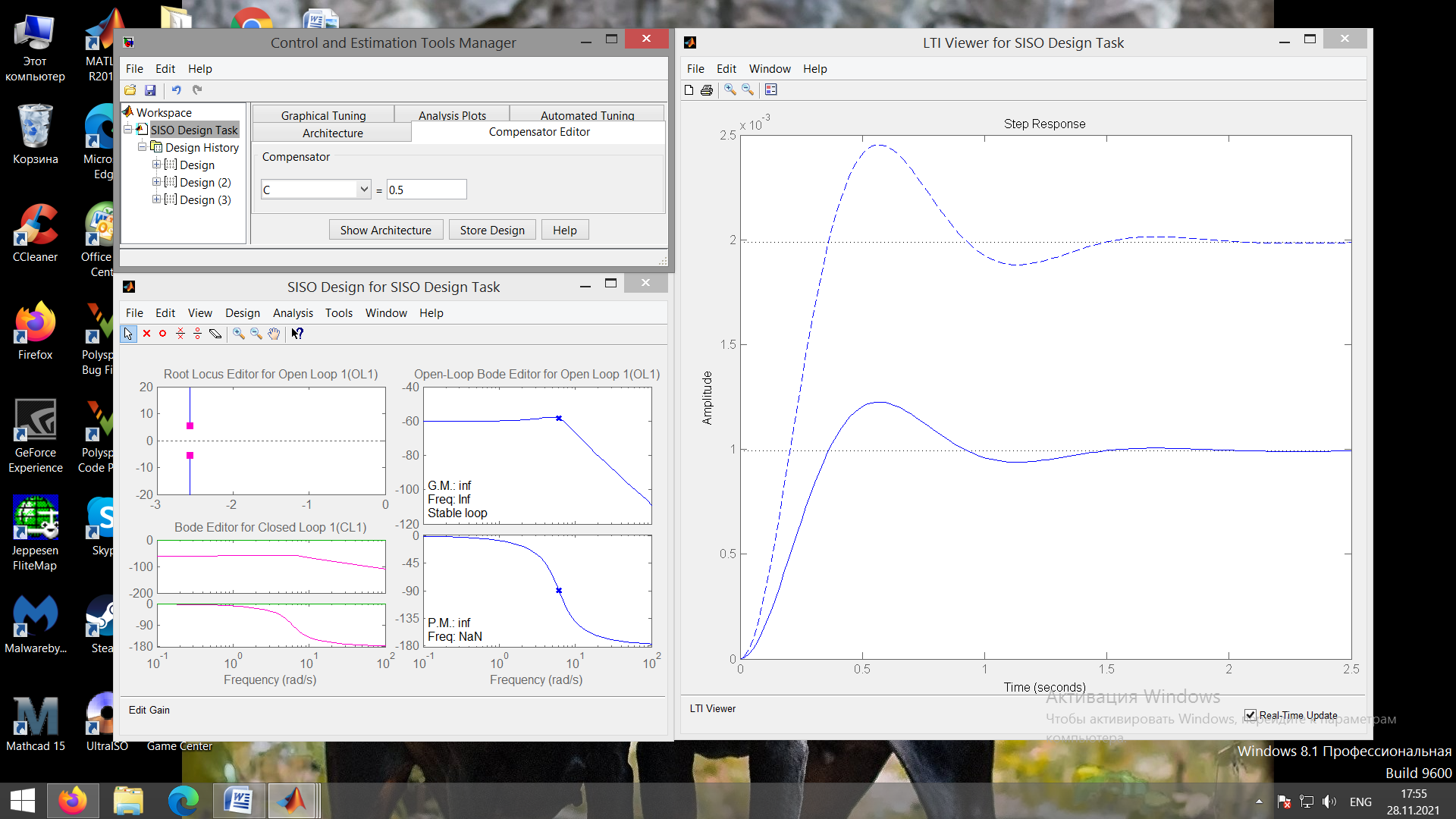
Для С3= 0.5
Змінюючи коефіцієнти регулятора: С1=0.001 – отриманий графік не відповідає поставленому завданню; C2=0.1 – не задовольняє;
С3= 0.5 – перерегулювання зменшилось, але значення перехідного процесу не досягає заданого.
Висновок:
При дослідженні корегувальної ланки у якості регулятора використовувалась пропорційна ланка (підсилювач), можна зробити такі висновки:
При збільшенні К коефіцієнта регулятора (підсилення) – збільшується амплітуда перехідного процесу, пере регулювання не зменшується а усталене значення перехідного процесу не досягає заданого значення.
При зменшенні коефіцієнта К відбувається зменшення амплітуди але при цьому перерегулювання залишається усталеним.
Необхідно використовувати регулятори з іншою структурою.
Завдання 2
Виконати
налаштування коефіцієнту корегувальної
ланки з заданою передатною функцією:

Для цього виконаємо наступні дії в середовищі Matlab.
2.1 Знайдемо передатні функції елементів системи керування: F=tf (1) – передатня ф-я вхідного сигналу задаючого пристрою; H=tf (1) – передатня ф-я датчика; G=tf(0.074,[1 5.124 37.21]) – передатня ф-я об’єкта керування; C=tf([T01 1],1)– передатня функція регулятора.
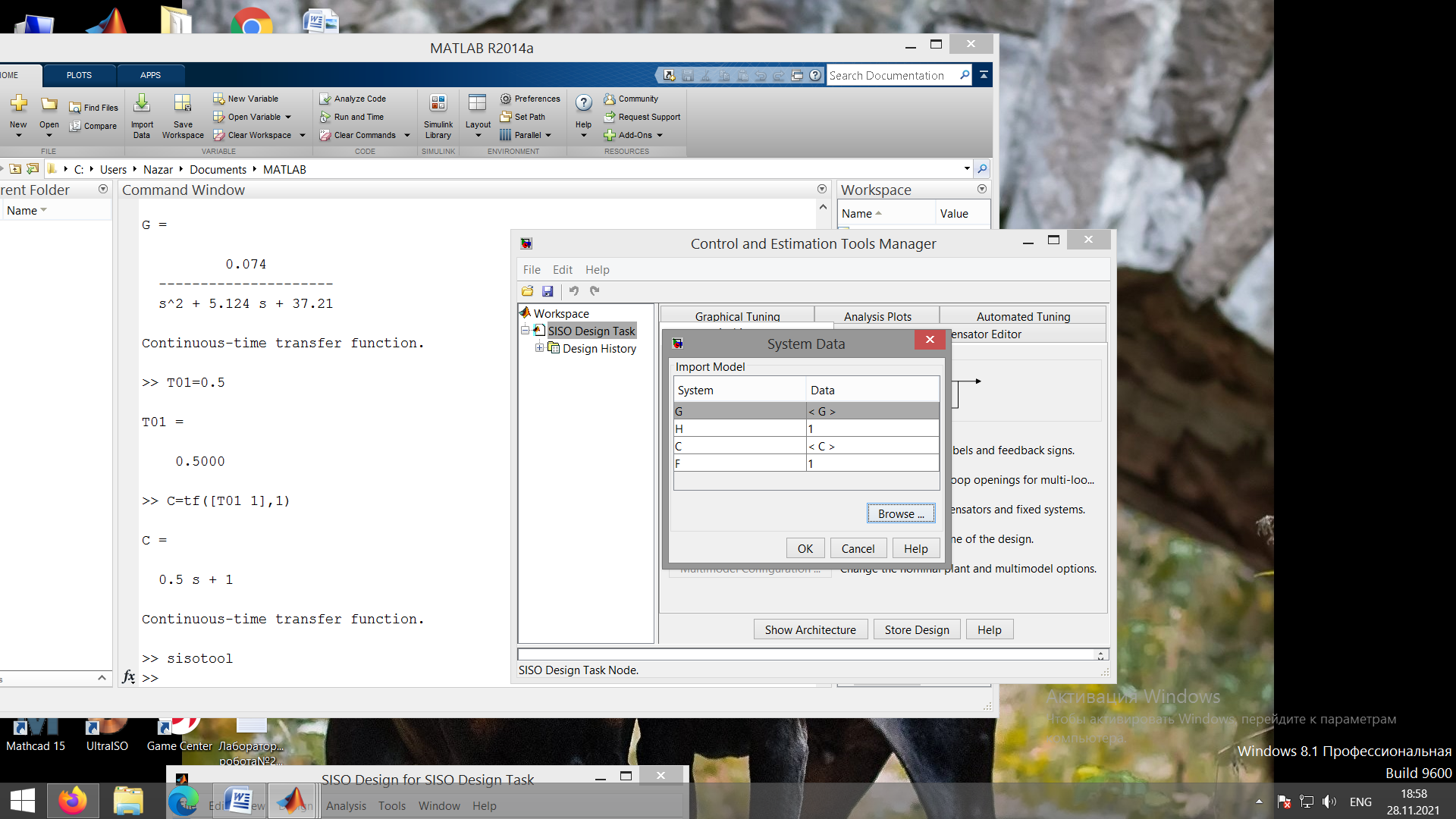
2.2 Введемо в командному вікні Matlab команду “sisotool”
2.3 Імпортуємо тільки G та С.
2.4 У вікні “Analysis plots” задамо тип графіку “step”.
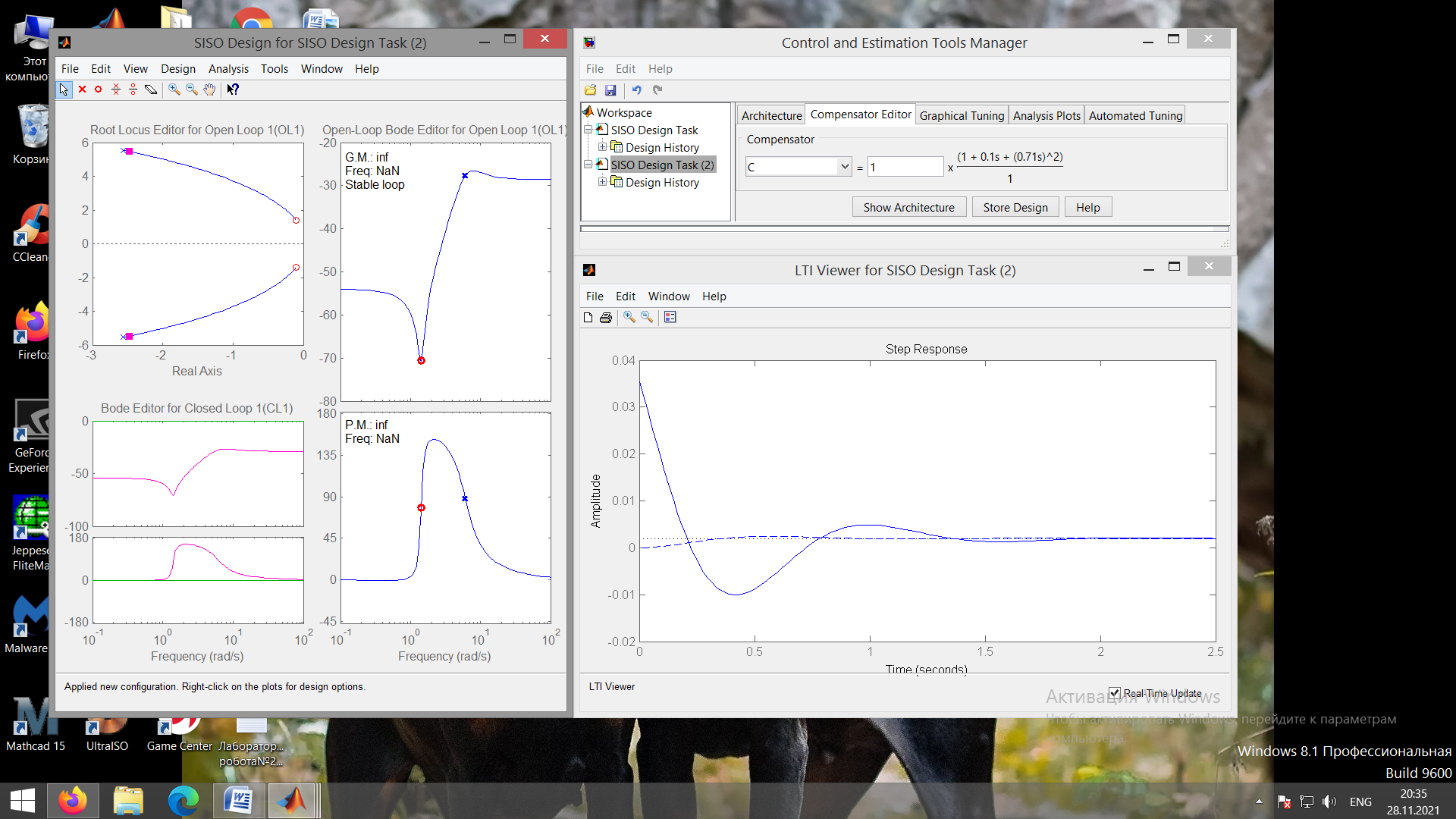
2.5Змінюючи коефіцієнт регулятора отримаємо значення:
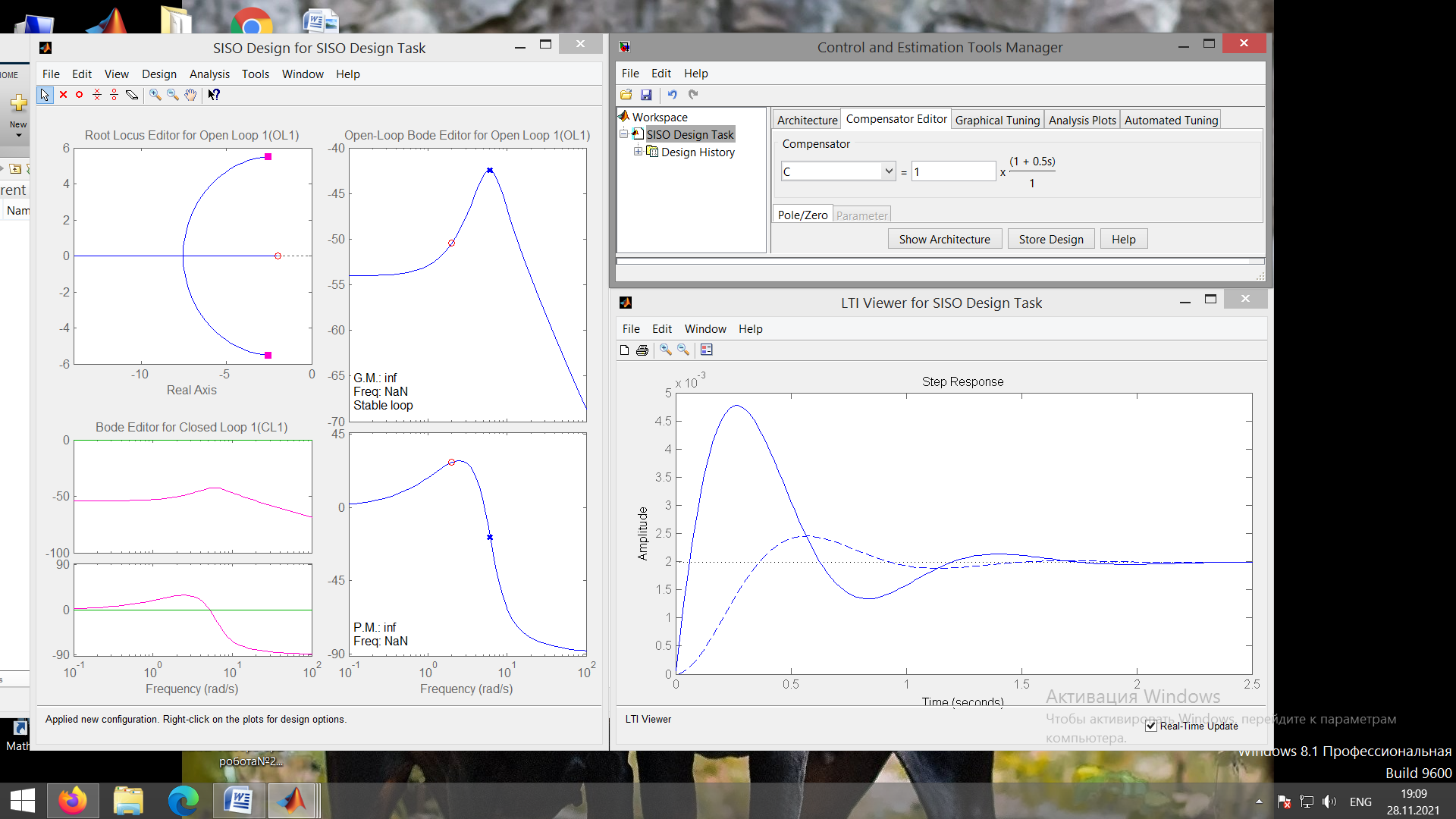
Для С=1
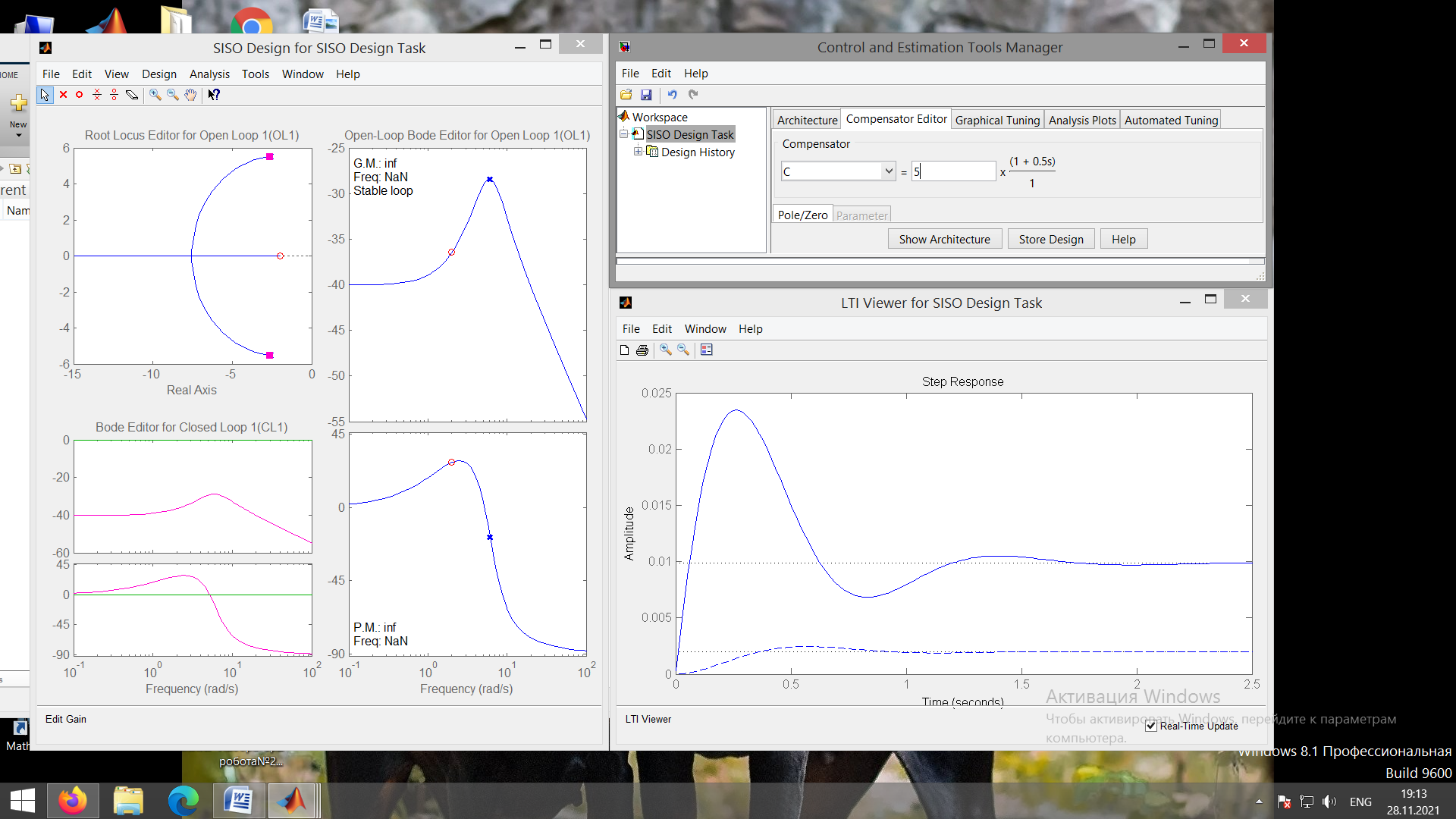
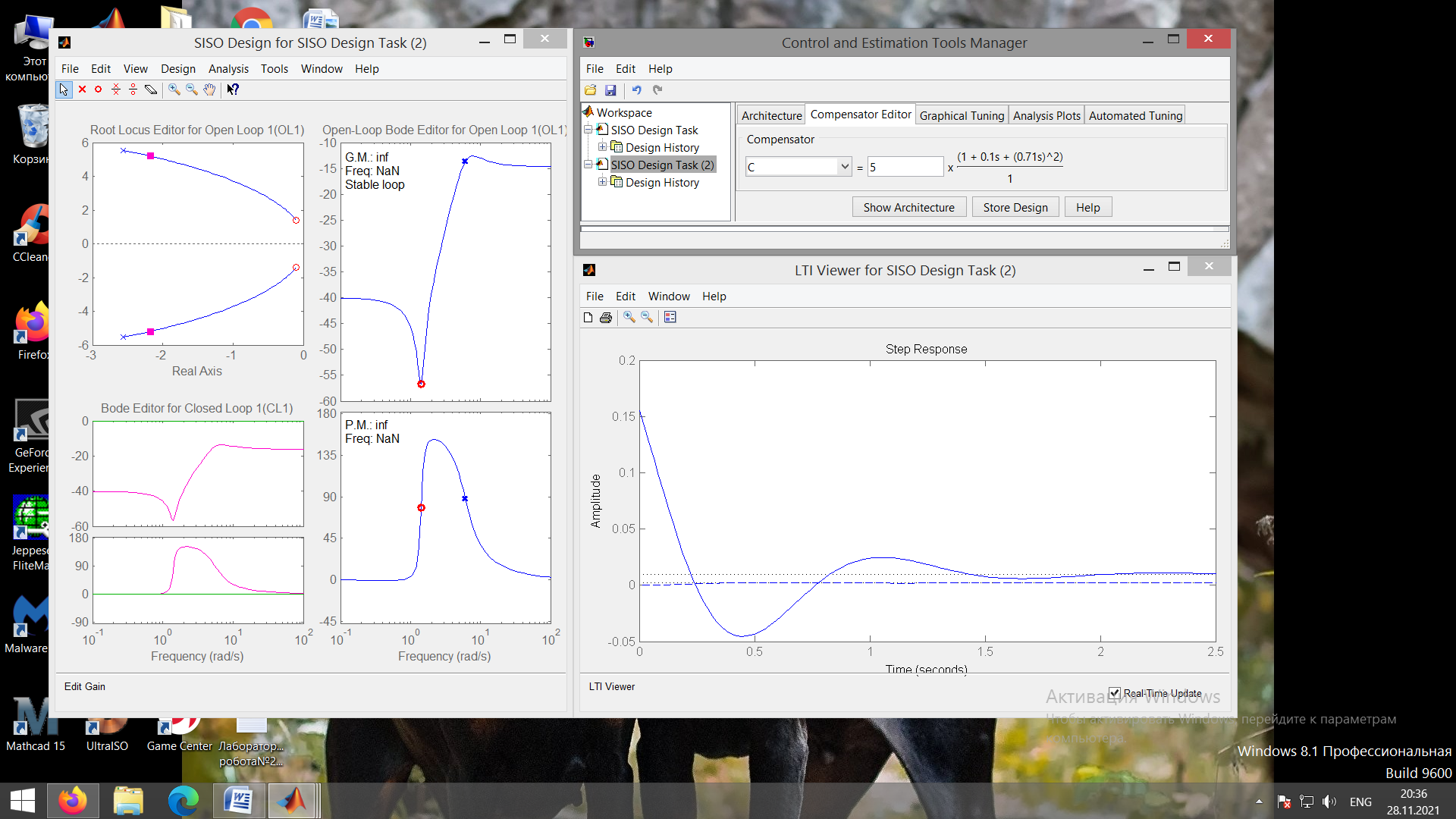
Для С=5
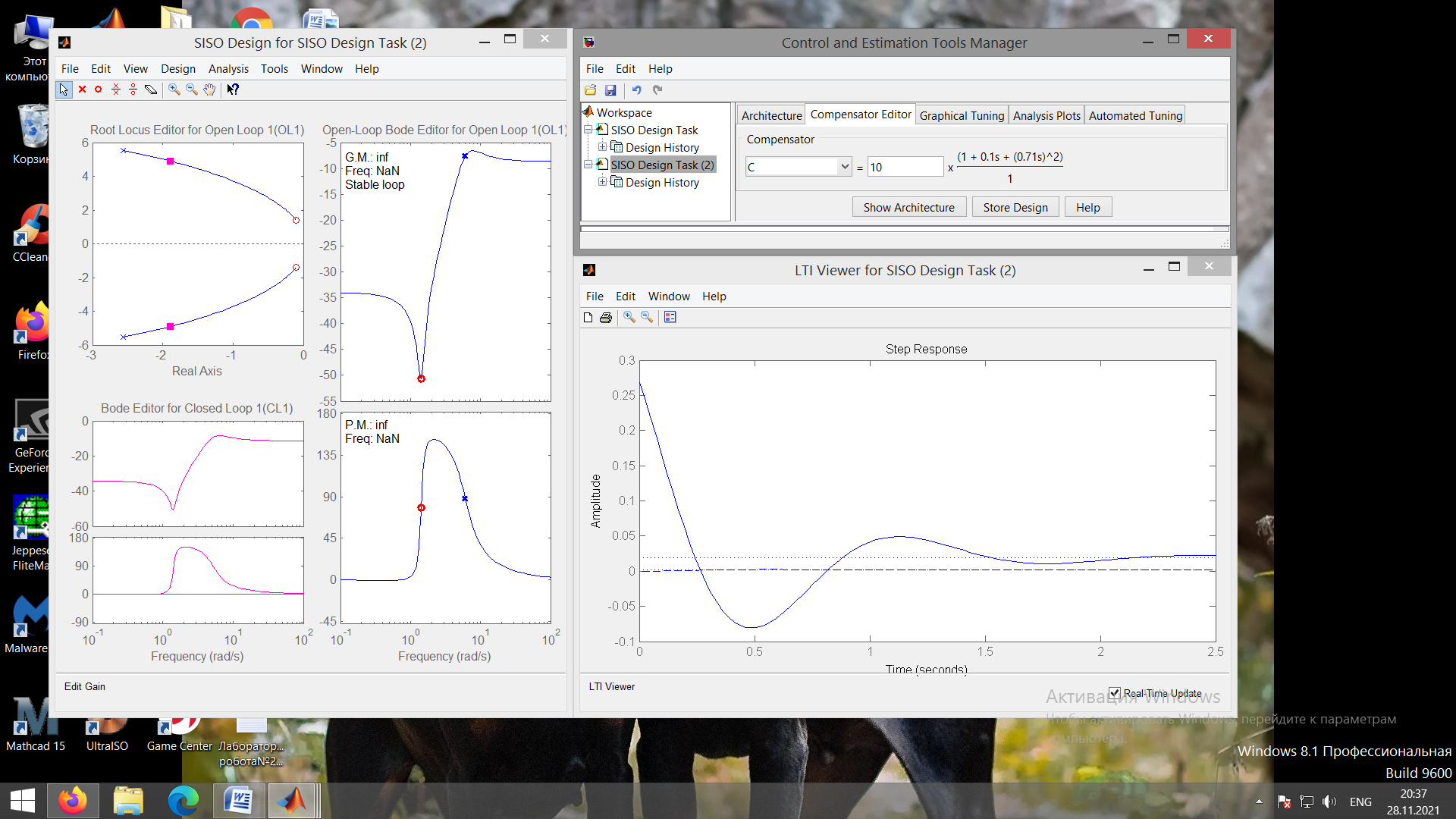
Для С=10
Висновок:
Таким чином, при дослідженні корегувальної ланки заданою передавальною функцією ми змінювали коефіцієнт К в межах від 1 до 10. Результати імітаційного моделювання показують, що застосування даного типу регулятора приводить до збільшення перерегулювання а також до збільшення часу перехідного процесу.
Даний тип регулятора не може використовуватись для покращення характеристик перехідного процесу, треба використовувати регулятори іншого типу.
Завдання 3
Виконати
налаштування коефіцієнту корегувальної
ланки з заданою передатною функцією:

Для цього задамо передатні функції елементів системи керування в середовищі Matlab.
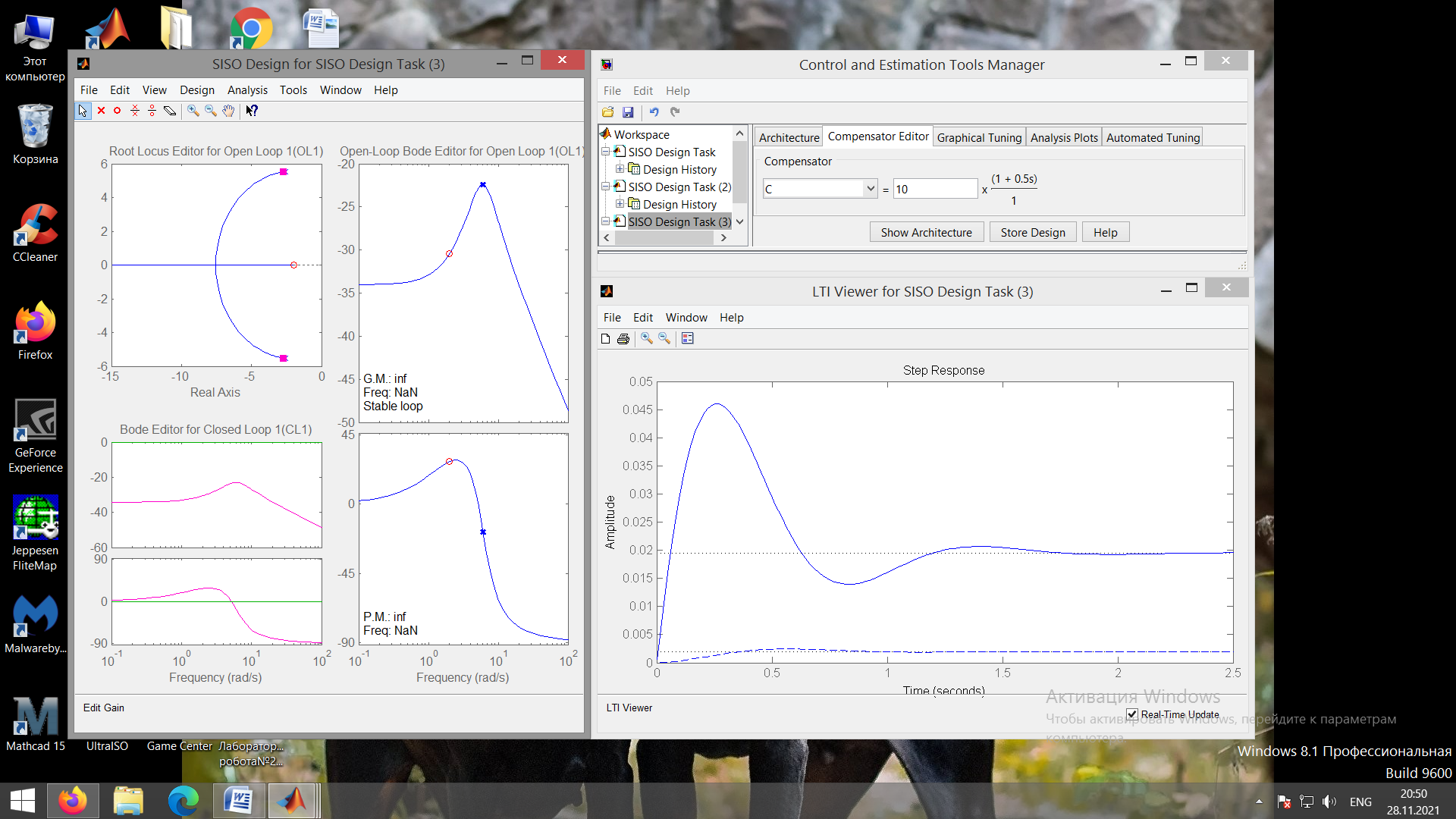
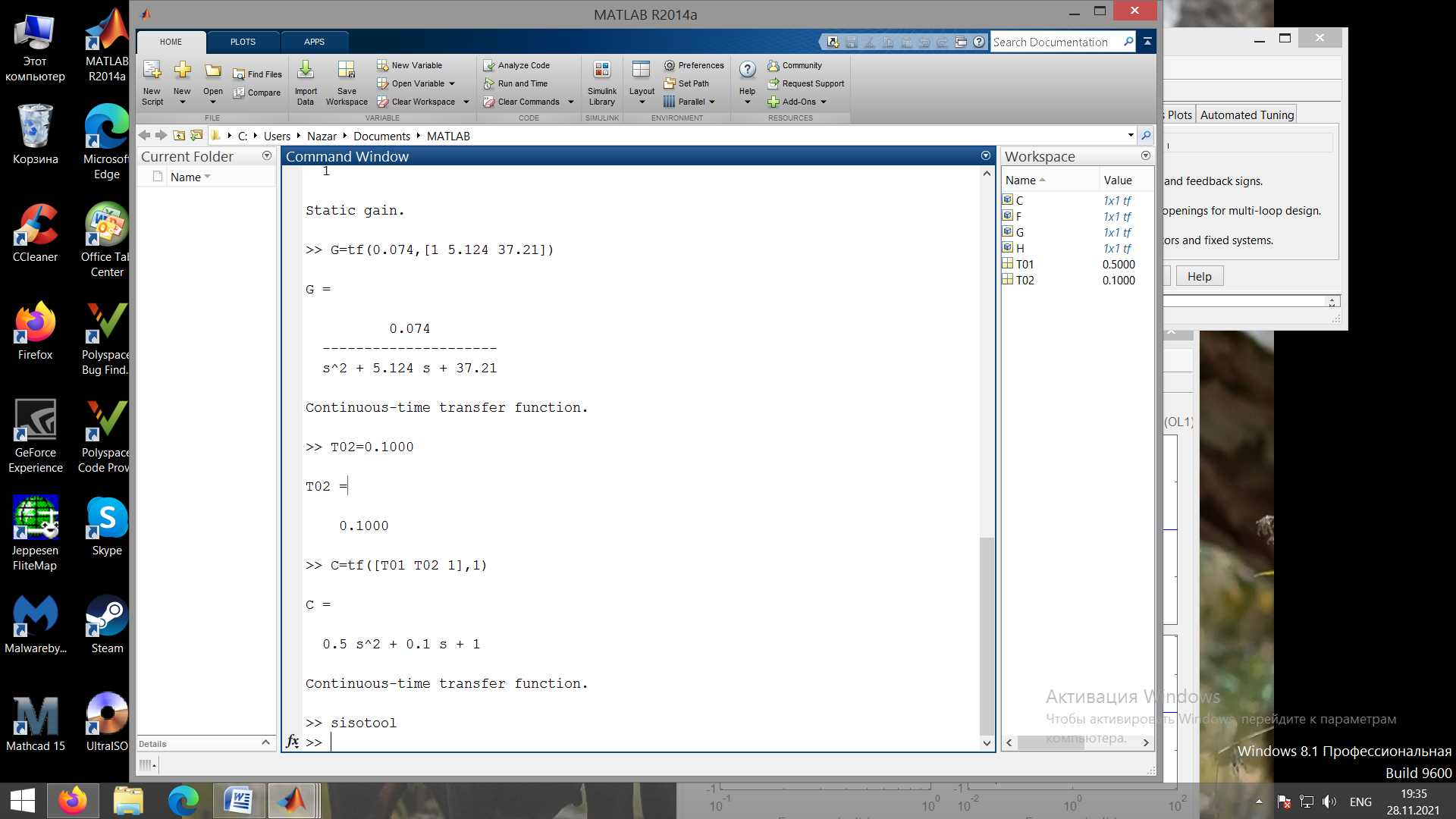
3.1 Знайдемо передатні функції елементів системи керування: F=tf (1) – передатня ф-я вхідного сигналу задаючого пристрою; H=tf (1) – передатня ф-я датчика; G=tf(0.074,[1 5.124 37.21]) – передатня ф-я об’єкта керування; C=tf([T01 T02 1],1)– передатня функція регулятора.
3.2 Введемо в командному вікні Matlab команду “sisotool”
3.3 Імпортуємо тільки G та С.
3.4 У вікні “Analysis plots” задамо тип графіку “step”.
3.5Змінюючи коефіцієнт регулятора отримаємо значення:
Для С=1
Для С =5
Для С=10
Висновок:
Таким чином, при дослідженні корегувальної ланки заданою передавальною функцією ми змінювали коефіцієнт К в межах від 1 до 10. Результати імітаційного моделювання показують, що застосування даного типу регулятора приводить до збільшення перерегулювання а також до збільшення часу перехідного процесу.
Даний тип регулятора не може використовуватись для покращення характеристик перехідного процесу, треба використовувати регулятори іншого типу.
Завдання 4
Виконати
налаштування коефіцієнту корегувальної
ланки з заданою передатною функцією:
Для цього задамо передатні функції елементів системи керування в середовищі Matlab.
4.1 Знайдемо передатні функції елементів системи керування: F=tf (1) – передатня ф-я вхідного сигналу задаючого пристрою; H=tf (1) – передатня ф-я датчика; G=tf(0.074,[1 5.124 37.21]) – передатня ф-я об’єкта керування; C=tf(1,[0.5 1])– передатня функція регулятора.
4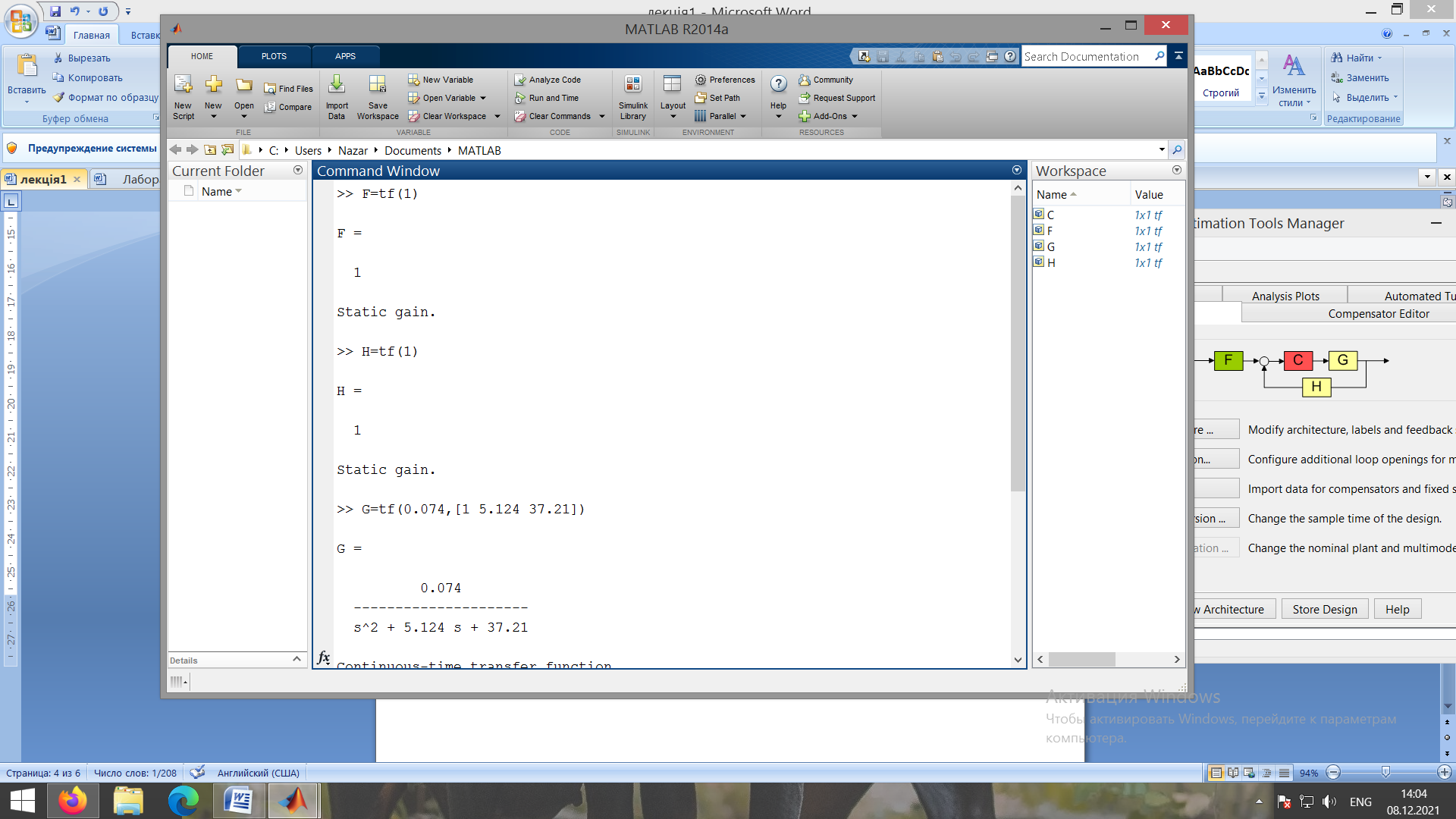 .2
Введемо
в командному вікні Matlab
команду
“sisotool”
.2
Введемо
в командному вікні Matlab
команду
“sisotool”
4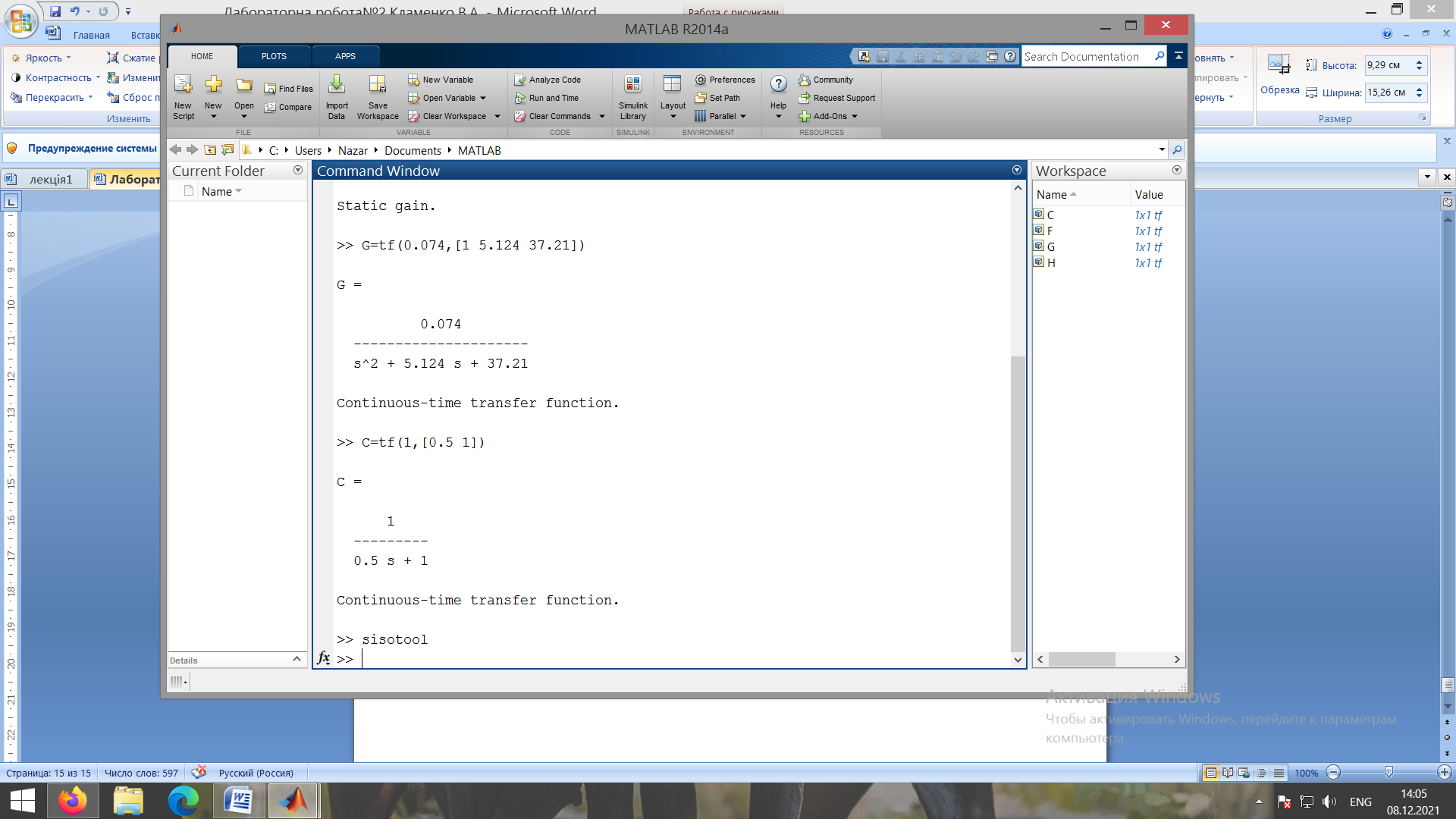 .3
Імпортуємо
тільки G
та
С.
.3
Імпортуємо
тільки G
та
С.
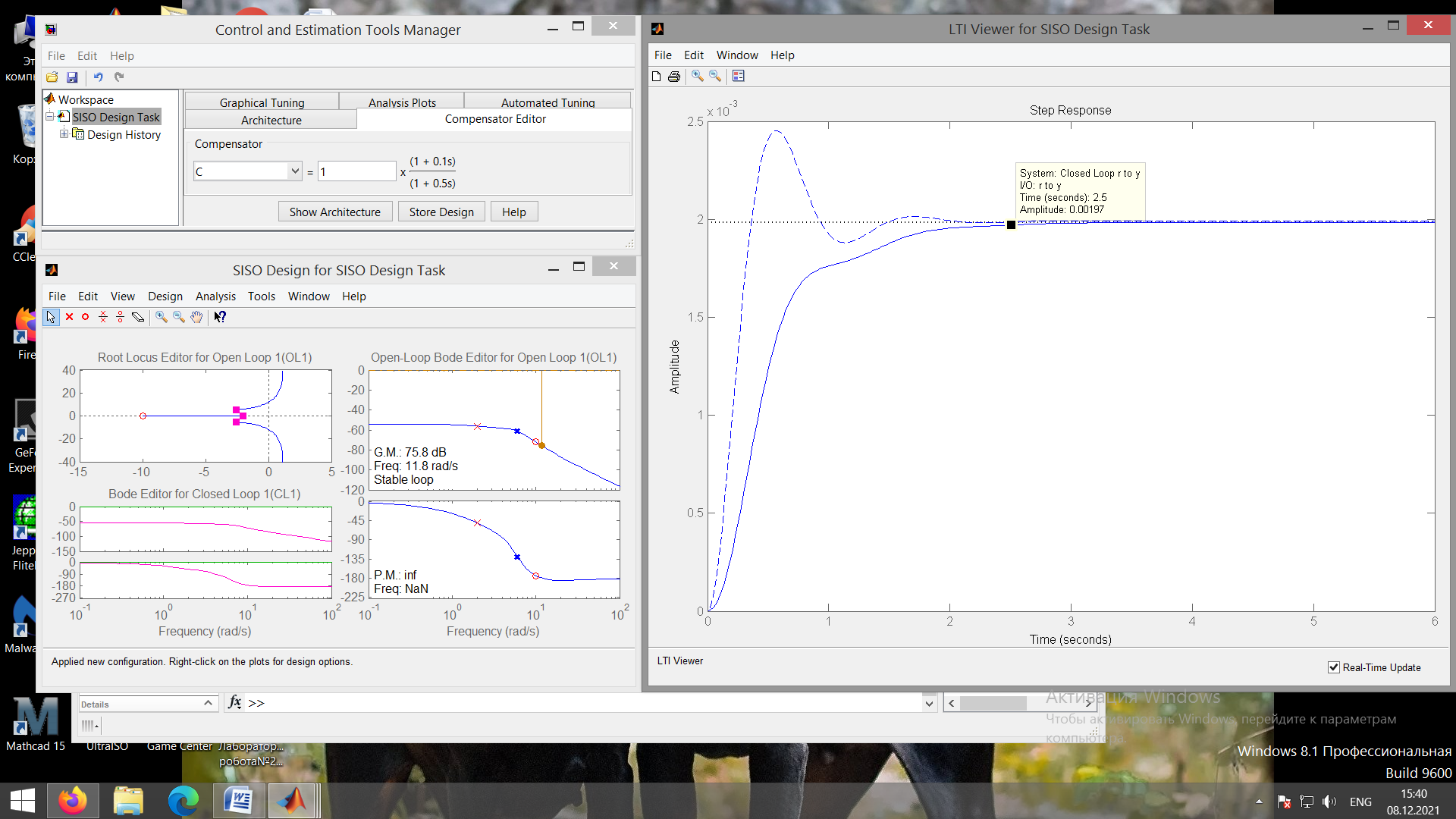
4.4 У вікні “Analysis plots” задамо тип графіку “step” та виставимо відповідні флажки.
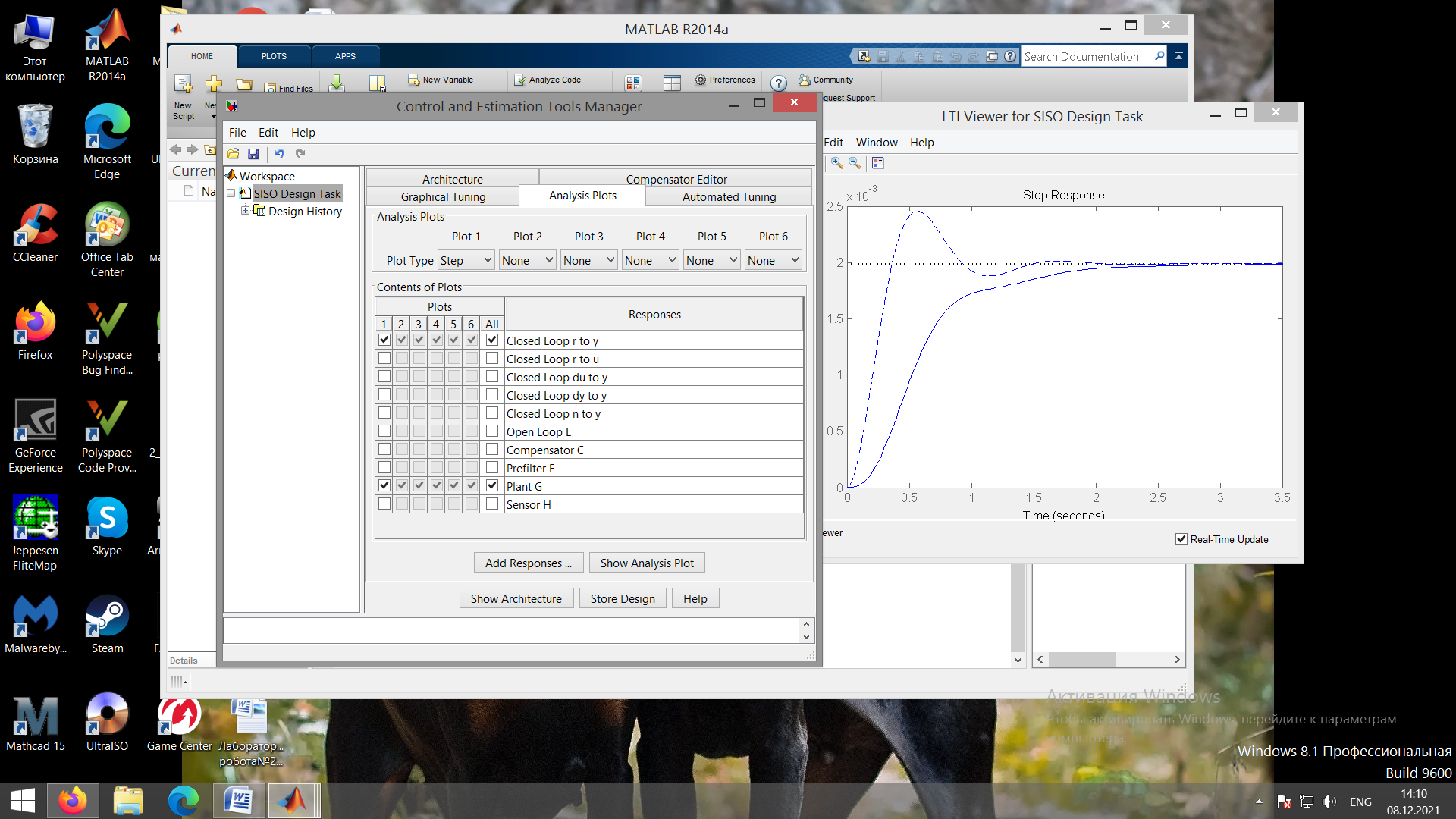
4.5Змінюючи коефіцієнт регулятора отримаємо значення:
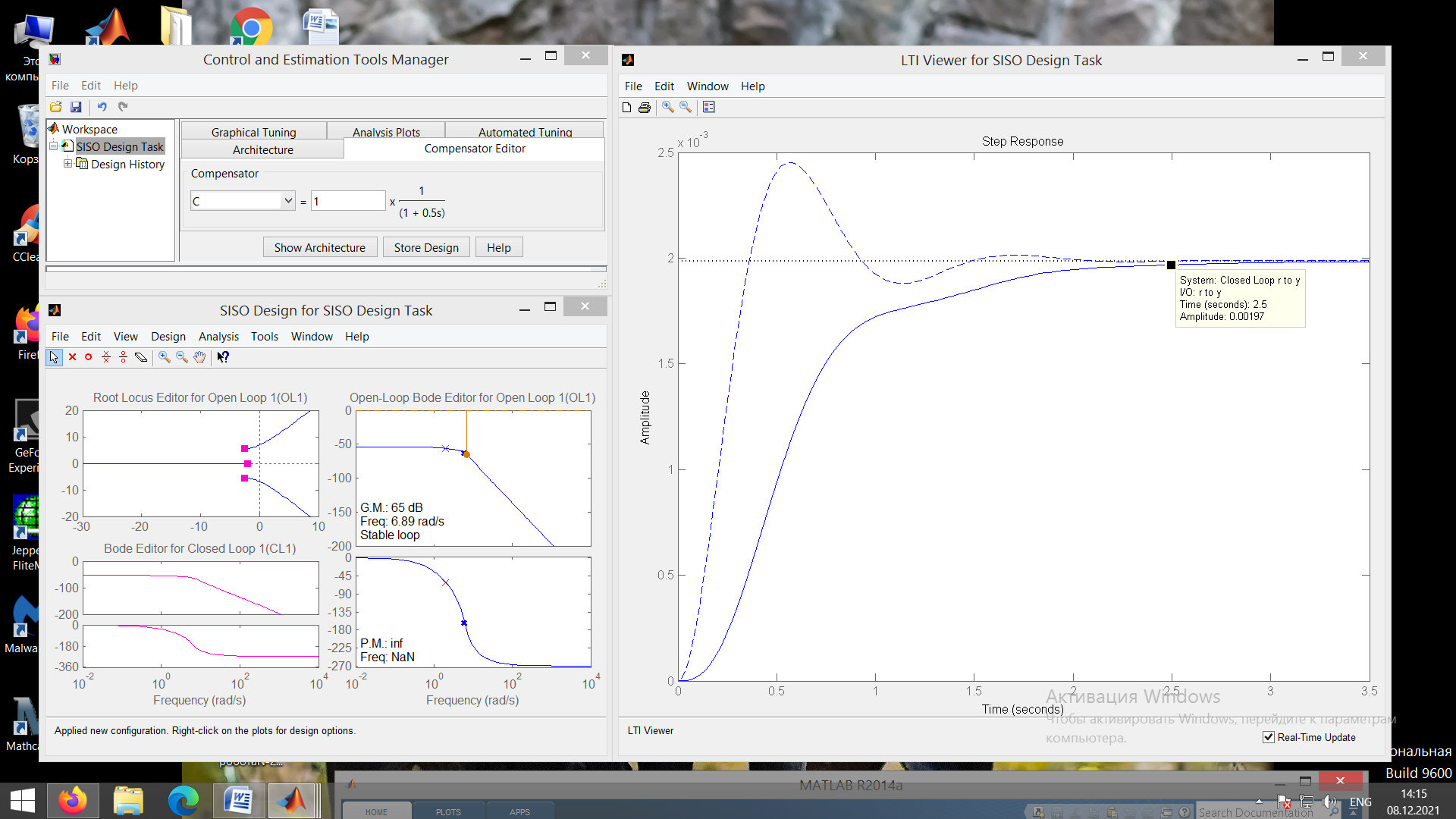
C=1 – саме оптимальне значення;
Перерегулювання = 0;
Час перехідного процесу = 2.5
Висновок:
Таким чином даний регулятор дозволяє покращити перехідний процес, а саме: зменшити час перехідного процесу до t= 2.5с. і зменшити пере регулювання до 0.
Завдання 5
Виконати
налаштування коефіцієнту корегувальної
ланки з заданою передатною функцією:
Для цього задамо передатні функції елементів системи керування в середовищі Matlab.
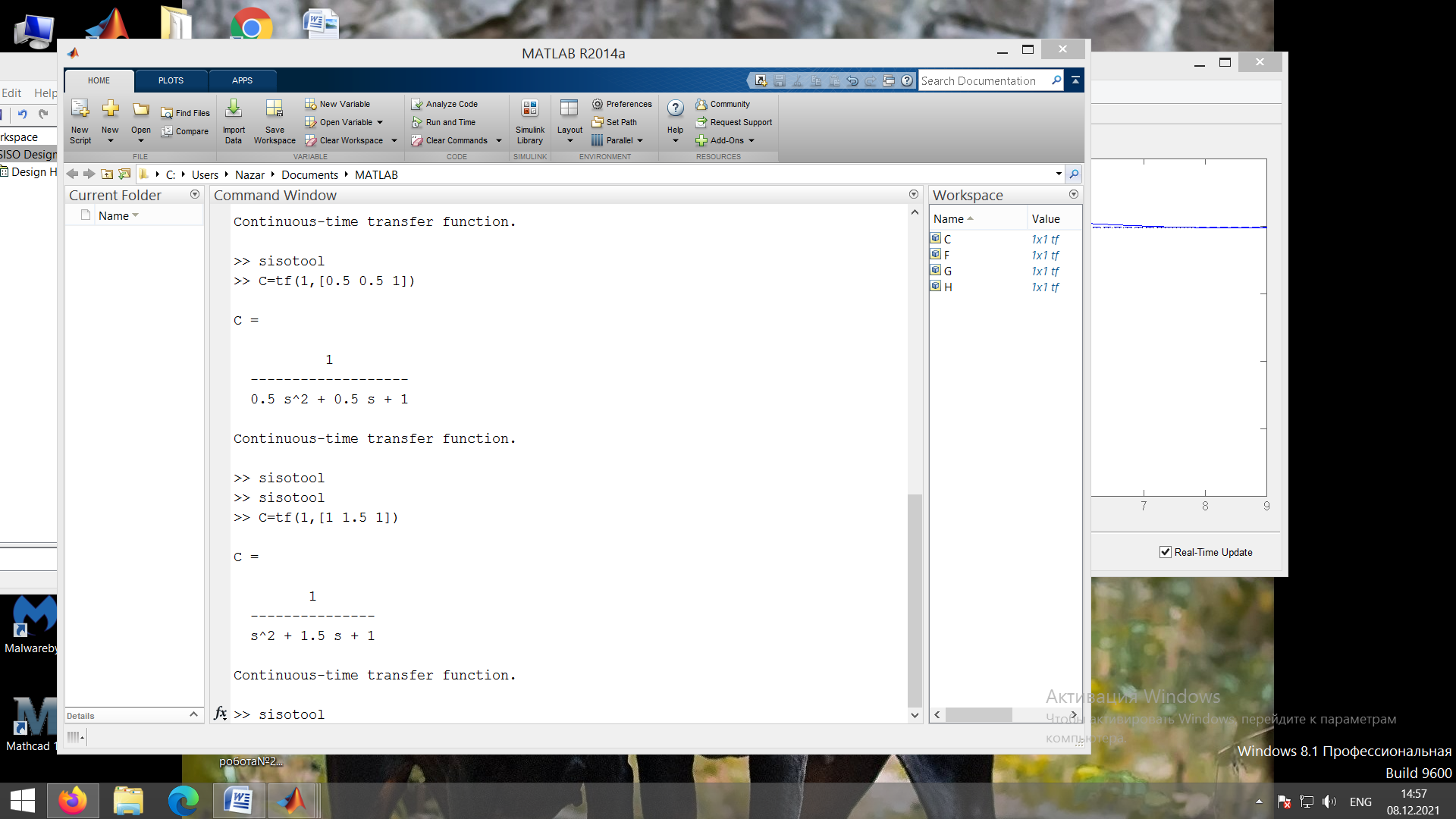
5.1 Знайдемо передатні функції елементів системи керування: F=tf (1) – передатня ф-я вхідного сигналу задаючого пристрою; H=tf (1) – передатня ф-я датчика; G=tf(0.074,[1 5.124 37.21]) – передатня ф-я об’єкта керування; C=tf(1,[1 0.5 1]) передатня функція регулятора.
5.2 Введемо в командному вікні Matlab команду “sisotool”
5.3 Імпортуємо тільки G та С.
5.4 У вікні “Analysis plots” задамо тип графіку “step” та виставимо відповідні флажки.
5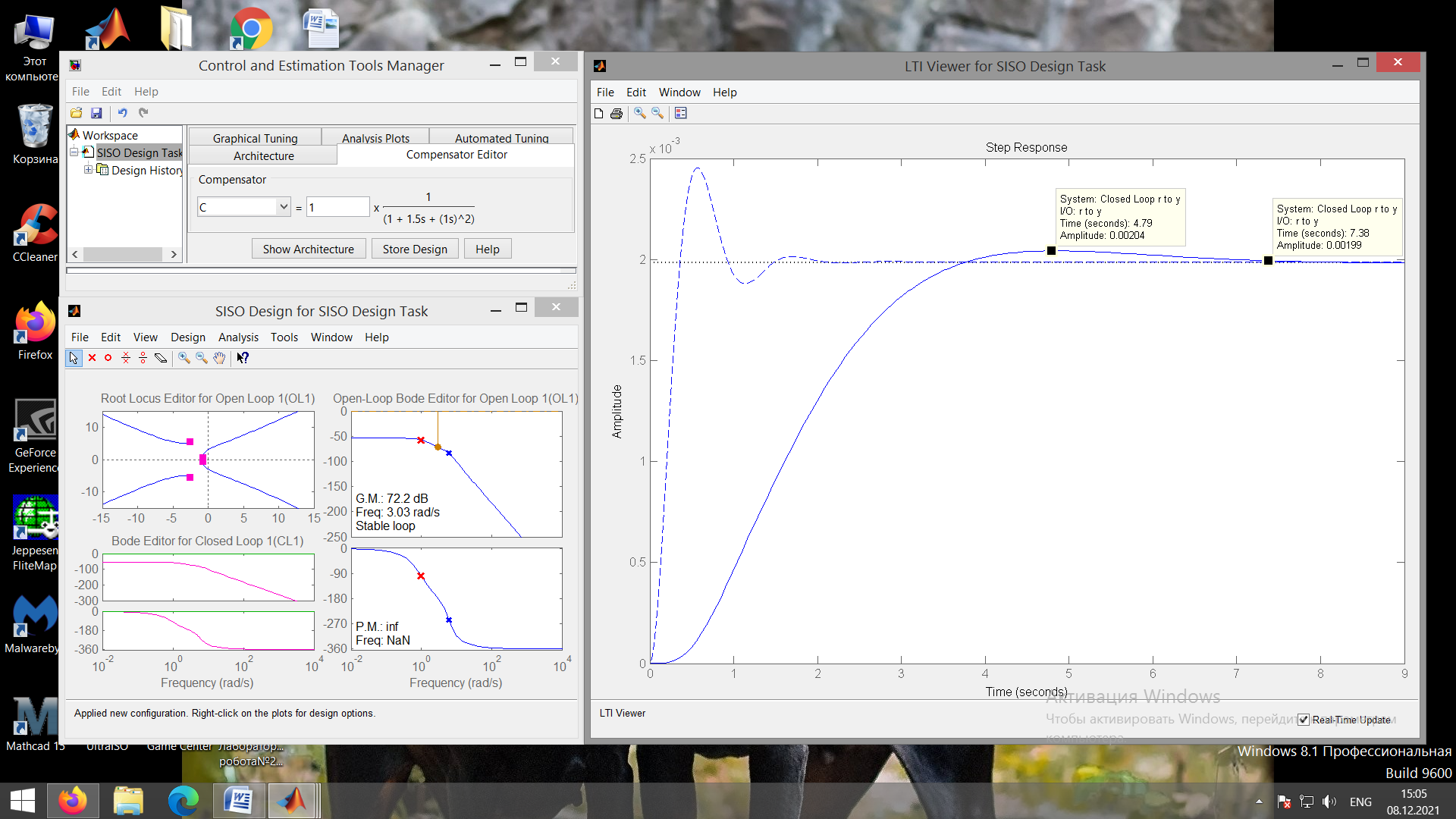 .5Змінюючи
коефіцієнт
регулятора
отримаємо
значення:
.5Змінюючи
коефіцієнт
регулятора
отримаємо
значення:
C=1;
Аmax=0.00204; Aуст=0.00199
Перерегулювання
= =2%
=2%
Висновок:
Таким чином, при заданих коефіцієнтах Т1=1.5 і Т2=1, даний регулятор покращив якість перехідного процесу а саме: зменшив перерегулювання до 2% але збільшив час перехідного процесу до t=7.65с.
Завдання 6
Виконати
налаштування коефіцієнту корегувальної
ланки з заданою передатною функцією:
Для цього задамо передатні функції елементів системи керування в середовищі Matlab.
6.1 Знайдемо передатні функції елементів системи керування: F=tf (1) – передатня ф-я вхідного сигналу задаючого пристрою; H=tf (1) – передатня ф-я датчика; G=tf(0.074,[1 5.124 37.21]) – передатня ф-я об’єкта керування; C=tf([0.1 1],[0.5 1]) передатня функція регулятора.
6.2 Введемо в командному вікні Matlab команду “sisotool”
6.3 Імпортуємо тільки G та С.
6.4 У вікні “Analysis plots” задамо тип графіку “step” та виставимо відповідні флажки.
6.5Змінюючи коефіцієнт регулятора отримаємо значення:
Даний тип регулятора з заданими Т1 та Т2 дозволяє зменшити пере регулювання до 0 а також зменшити час перехідного процесу до 2.5 с.
6.6 Проаналізуємо як зміниться графік перехідного процесу, якщо:
Т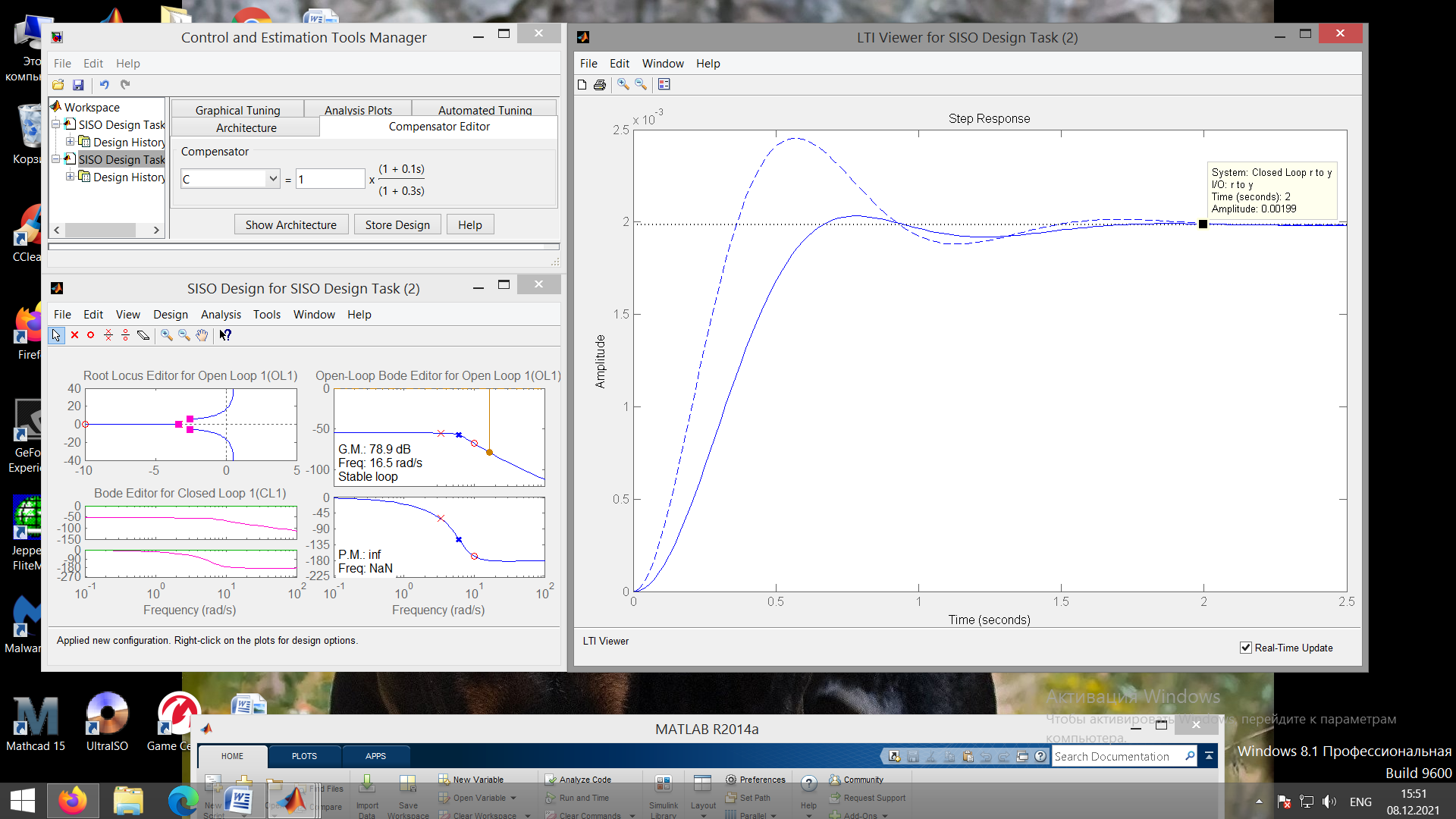 1=0.1
а Т2=0.3;
а
також
Т1=0.3
а Т2=0.5
1=0.1
а Т2=0.3;
а
також
Т1=0.3
а Т2=0.5
Отримаємо наступні значення:
При Т1=0.1 а Т2=0.3 перерегулювання зменшилось до 2% а час перехідного процесу зменшився до 2 с.
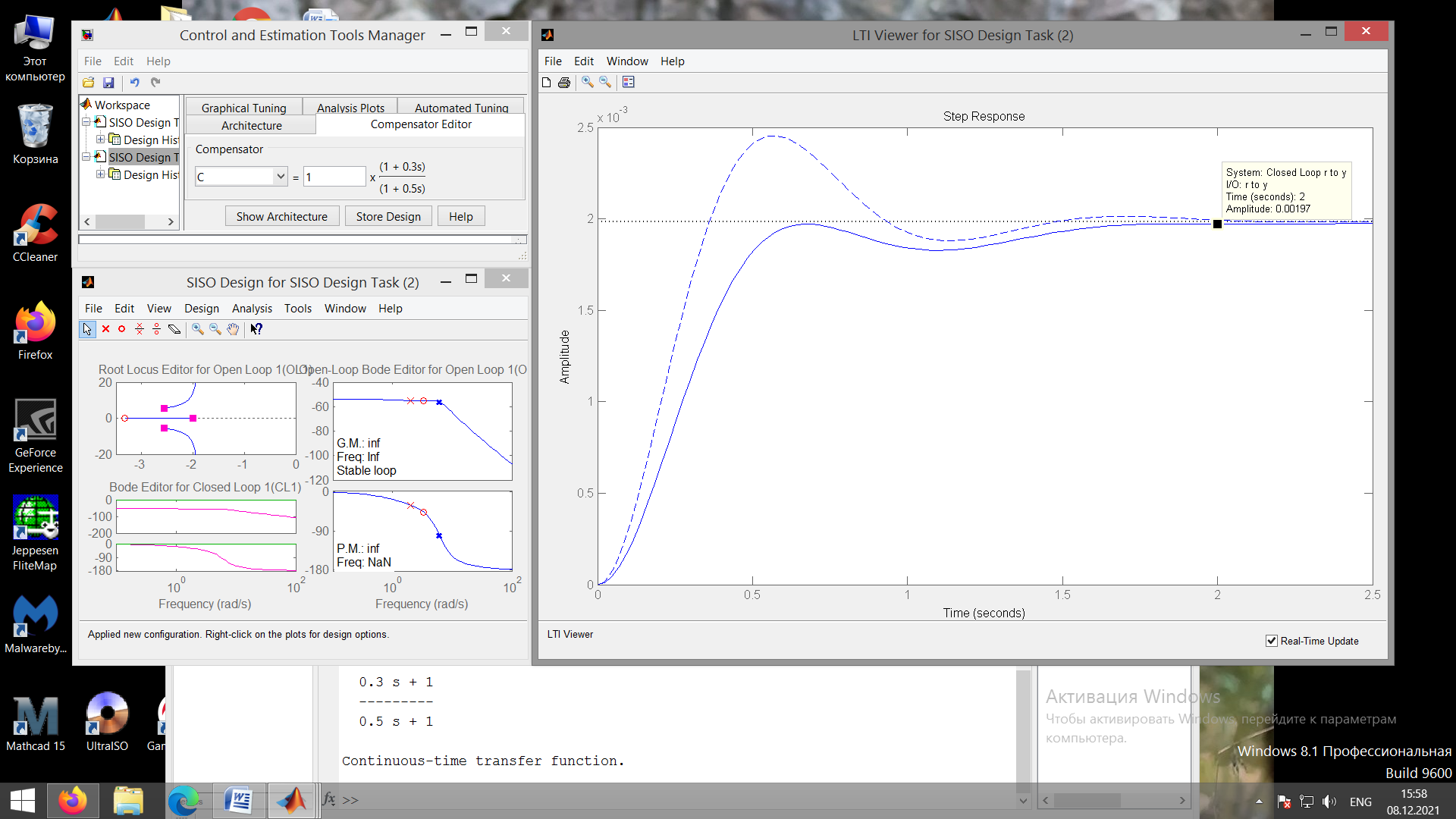
При Т1=0.3 а Т2=0.5 перерегулювання =0, а час перехідного процесу становить 2с.
Загальний висновок
Таким чином приведений аналіз отриманих результатів імітаційного моделювання показав, що у якості корегувальних регуляторів можуть бути використані корегувальні пристрої задані передатніми функціями Wc4, Wc5, Wc6, при цьому найбільш якісні перехідні процеси були отримані при застосуванні корегуючого пристрою заданого передатною функцією ,де Т1=0.3 а Т2=0.5., при якому перерегулювання =0, а час перехідного процесу =2с.