

3 курс / єгоров бортові / 1 семестр / тема 2
.7.docКонтрольне завдання до теми 2.7
В яких системах ПС проводяться вимірювання кутового положення засобів керування?
Вимірювання кутового положення засобів керування проводяться в системах дистанційного керування силової установки.
Для яких пристроїв літака необхідна інформація про кутове положення?
Для бортового комп’ютера літака.
Поясніть принцип дії датчика кутового пересування.
Сигнальний елемент через чутливий елемент відкриває транзистор. По обмотці протікає струм, в результаті чого вона намагнічується та взаємодіє з потоком постійного магніту ротора. Внаслідок чого виникає обертаючий момент и двигун починає обертатися. Разом з ротором обертається СЕ ДПР. При відхиленні ротора на більше ніж 30 градусів СЕ діє на два чутливі елементи, в результаті відкириються зразу два транзистора і струм буде протікати по двох обмотках. Коли кут повороту буде більше 90 перший транзистор закриється та струм буде протікати тільки по другій обмотці.
Розкажіть про основи побудови датчиків кутового пересування.
Датчик кутового пересування являє собою безконтактний двигун постійного струму, який складається з трьох частин: безконтактного двигуна, датчика положення ротора та коммутатора.
Поясніть роботу датчика кутового пересування.
Датчик кутового пересування видає сигнал пропорційний куту відхилення будь-якого з органів керування в вигляді напруги постійного струму.
Поясніть принцип дії датчика кутового положення.

Розкажіть про основи побудови датчиків кутового положення.
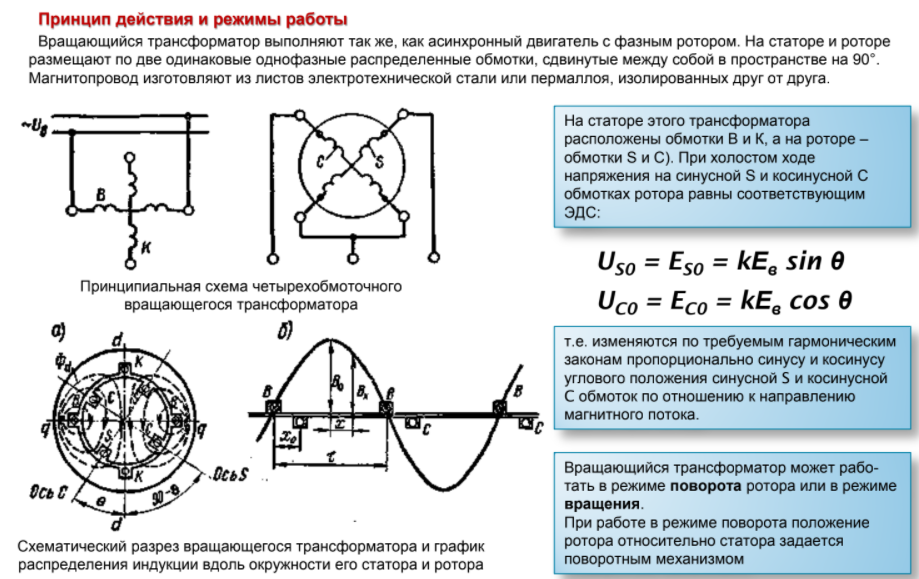
Датчики кутового положення побудовані так як і асинхронний двигун з фазним ротором. На статорі і роторі розміщають по дві однакові однофазні обмотки, які зсунуті між собою в просторі на 90 градусів. Магнітопровід виготовляють з листів електротехнічної сталі або пермаллоя, які ізольовані один від одного.
Поясніть роботу датчика кутового положення.
Датчик кутового положення являє собою електричну мікромашину змінного струму, яка перетворює кут повороту ротора в напругу яка пропорційна цьому куту або деяким його функціям.
Поясніть принцип дії сельсін-датчика.
Принцип дії сельсін-датчика полягає в властивості вимірювання взаємоіндукції між обмотками ротора та статора при повороті вала ротора відносно початкового положення, яке відповідає співпадінню осей обмотки збудження і першої котушки троьохпроменевої обмотки.
Розкажіть про основи побудови сельсін-датчика.
Існує два варіанта побудови сельсін-датчика:
1) На статорі з явно вираженими полюсами розміщується однофазна обмотка. В пазах ротора закладається трьохпроменева обмотка, з'єднана зіркою.
2) Однофазна обмотка розміщується на роторі з явно вираженими полюсами, а трьохпроменева закладається в пази статора.
Поясніть роботу сельсін-датчика в індикаторному режимі.
В індикаторному режимі сельсін-датчик повертається примусово а сельсін-прийомник установлюється в узгодженне з датчиком положення під дією власного синхронізуючого моменту. Цей режим використовується в системах контролю кута повороту об’єкта.
Поясніть роботу сельсін-датчика в трансформаторному режимі.
В трансформаторному режимі датчик повертається примусово, а приймач виробляє напругу, яка являється функцією кута неузгодженості.