

1-2 курс / біс єгоров / тема 1.3 єгоров
.docКонтрольні питання по темі 1.3
Розкажіть про обладнання, що входить до складу засобів автономного визначення навігаційних параметрів літака.
Средства автономного определения положения ВС включают в себя системы: метеонавигационную радиолокационную станцию, обеспечивающую получение радиолокационного изображения метеорологической обстановки и земной поверхности; радиовысотомер, обеспечивающий измерение истинной высоты полета самолета; систему раннего предупреждения и предотвращения столкновения с земной или водной поверхностью (СПРРЗ); систему предупреждения столкновения в воздухе.
Поясніть призначення інформаційно-вимірювального комплексу РЛ.
Информационный комплекс высотно-скоростных параметров (ИКВСП) предназначен для измерения, вычисления, формирования и выдачи в систему экранной индикации и в бортовые системы цифровой информации: о текущих высотно-скоростных параметров с реализацией закона компенсации аэродинамическиз погрешностей приемников воздушных давлений как функции числа М; об угле атаки и нормальной перегрузке самолета; о максимально допустимых значениях параметров; о температуре наружного воздуха; для формирования предупреждающего сигнала о приближении к предельно-допустимому углу атаки и выдачи его на МТШ.
Які параметри вимірює інформаційно-вимірювального комплекс РЛ?

Яке обладнання входить до складу інформаційно-вимірювального комплексу РЛ?
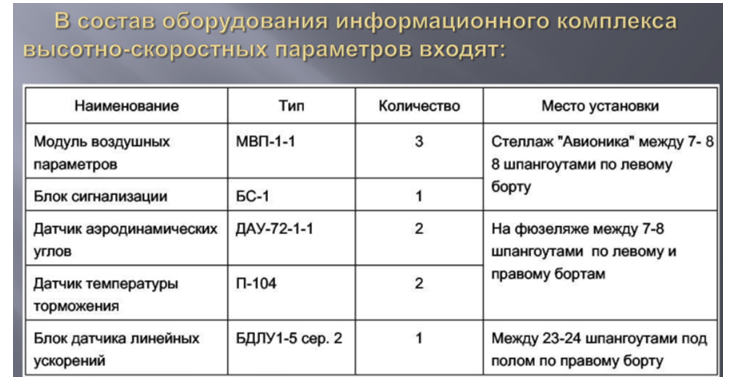
Які датчики входять до складу засобів визначення повітряних параметрів?
Модуль воздушных параметров, блок сигнализации, датчик аэродинамических углов, датчик температуры торможения, блок датчика линейных ускорений.
З якими системами літака взаємодіє інформаційний комплекс ІКВШП РЛ?
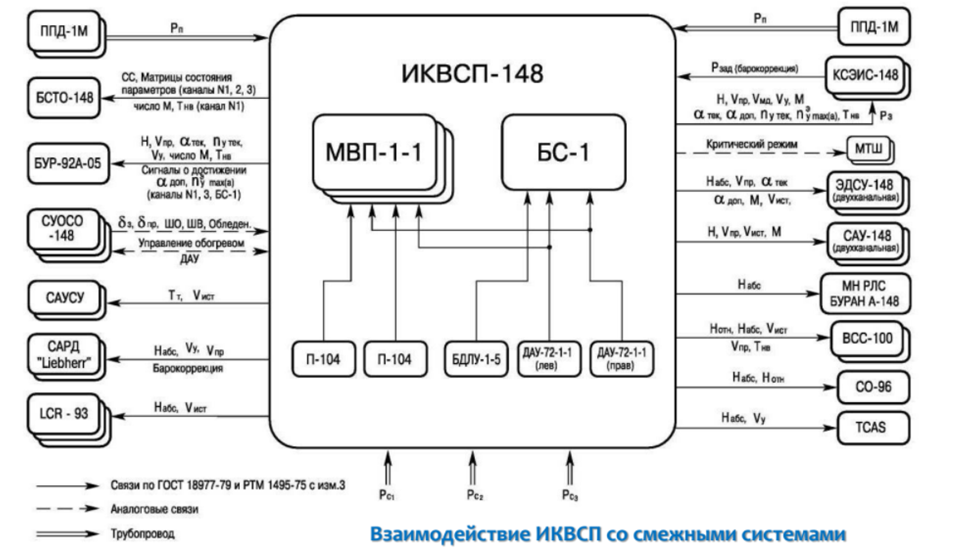
Поясніть роботу інформаційного комплексу ІКВШП РЛ.
ИКВСП объединяет все системы и приборы, которые измеряют, вычисляют и индицируют высотно-скоростные параметры, в единый многоканальный комплекс. В каждом канале комплекса вычисляется какой-либо один параметр. Канал состоит из трех равнозначных и независимых друг от друга подканалов. В подканалах вычисляется один и тот же параметр, но не зависимыми друг от друга датчиками, усилителями, преобразователями и т.д. В ИКВСП имеется система контроля достоверности величин вычисляемых параметров. Система контроля выявляет неисправные подканалы и информирует об этом экипаж и системы, использующие высотно-скоростные параметры, вырабатывая сигнал отказа подканала и канала в целом.
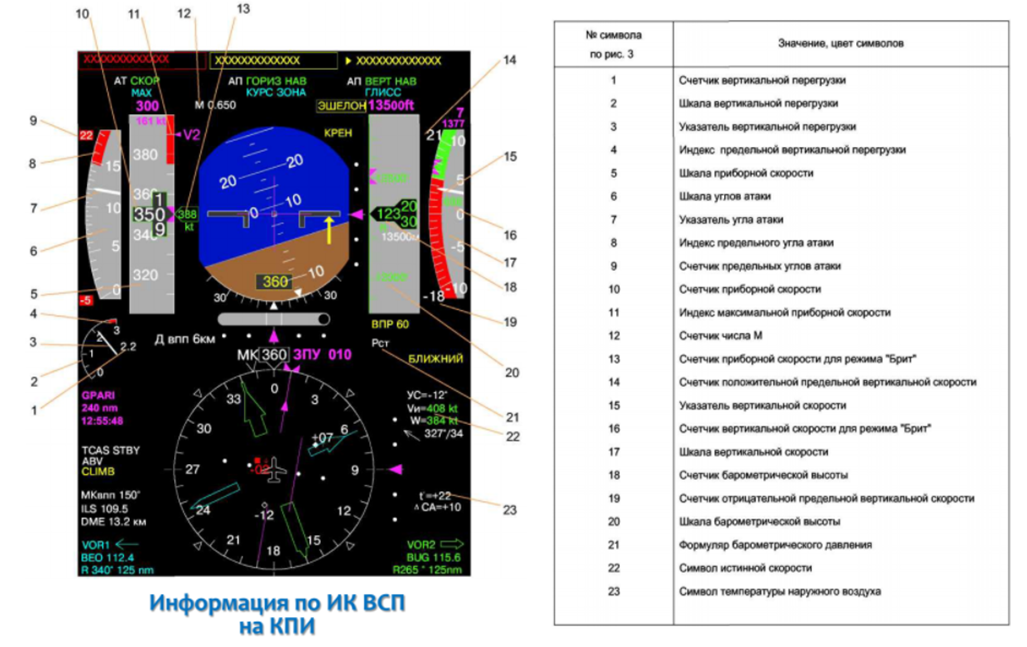
Яка інформація про повітряні параметри відображується на командно-пілотажному індикаторі РЛ?
Які параметри відносяться до параметрів просторового положення ПС?
Задача управления пространственным движением объекта предполагает определение параметров его углового и поступательного движения.
Яке обладнання відноситься до засобів визначення просторового положення ПС?
Метеонавигационная радиолокационная станция, радиовысотомер, доплеровский измеритель скорости и угла сноса и пр., инерциальные навигационные системы и курсовертикали.
Поясніть призначення безплатформної курсовертикалі РЛ.
Бесплатформенная курсовертикаль предназначена для определения:
Крена;
Тангажа;
Курса;
Угловых скоростей вокруг осей самолета;
Линейных ускорений
и другой пилотажно-навигационной информации.
Яке обладнання входить до складу безплатформної курсовертикалі РЛ?
- AHRU - блок курсовертикалі на монтажній рамі; - MSU CalPROM - калібрувальний модуль індукційного датчика; - MSU - магнітний індукційний датчик.
Поясніть роботу безплатформної курсовертикалі РЛ.
Бесплатформенная курсовертикаль представляет собой систему датчиков пространственного положения самолета, которая обеспечивает информацию о пространственном положении самолета, курсе и динамике полета (скорость и ускорение) самолета, используемую для управления полетом и выводимую на экраны пилотов.
Система механизирована как инерциальная измерительная система с использованием оптоволоконных датчиков и микро механических акселерометров, которые «привязаны» к основным осям самолета. Цифровой компьютер математически обрабатывает полученную скорость и ускорение самолета с тем, что бы получить курс, тангаж и крен. В систему так же поступают аэродинамические даны, после чего система выдает значение отфильтрованной инерциальной высоты полета и вертикальной скорости.
Яка інформація від безплатформної курсовертикалі РЛ відображається пілотам?
Информация о пространственном положении самолета, курсе и динамике полета (скорость и ускорение) самолета,
Поясніть призначення інерціальної інформаційної системи повітряних параметрів ADIRS.
ADIRU использует входные данные от внешних источников информации – датчиков: угла атаки (AOA), общей температуры воздуха (TAT) и модуля воздушных данных (ADM). Модули ADIRU связаны с блоком управления и индикации CDU инерциальной информационной системы воздушных данных ADIRS для осуществления управления и контроля состояни.
З яких функціональних підсистем складається ADIRS і для чого вони призначені?
Блок инерциальной информационной системы воздушных данных ADIRU состоит из информационного модуля воздушных данных ADR и информационного модуля инерциальных данных IR, которые объединены в один блок. ADIRU использует входные данные от внешних источников информации – датчиков: угла атаки (AOA), общей температуры воздуха (TAT) и модуля воздушных данных (ADM). Модули ADIRU связаны с блоком управления и индикации CDU инерциальной информационной системы воздушных данных ADIRS для осуществления управления и контроля состояния.
Яке обладнання входить до складу ADIRS?
ADIRS (Air Data Inertial Reference System) це система повітряних даних (Air Data) та інерціальна навігаційна система (Inertial Reference System). До складу ADIRS вхотять інерціальні навігаційні модулі (IRU - Inertial Reference Unit) та комп'ютери повітряних даних (ADC - Air Data Computer). IRU та ADC розміщені водному корпусі під назвою ADIRU (Air Data Inertial Reference Unit) таких блоків зазвичай три. Також до ADIRS входять модулі повітряних даних (ADM - Air Data Modul), трубки Піто, датчики статичного тиску, датчики кутів атаки, датчики температури повітря. Окремо датчиком інерціальної навігаційної системи IRS може бути магнітометр (магнітний індукційний двтчик).
Яке обладнання здійснює інформаційне забезпечення ADIRS?
Трубки Піто, датчики статичного тиску, датчики кутів атаки, датчики температури повітря, магнітометри.
Для чого призначений модуль повітряних параметрів ADM?
ADM отримує аналогові тиски повітря (повний від трубки Піто та статичний від статичного приймача) вимірюють їх значення і перетворюють у цифровий код, який потім надсилають ADIRU.
Поясніть принцип дії підсистеми визначення повітряних параметрів AD системи ADIRS.
Тиск повітря від трубки Піто та від статичного приймача надходять до ADM (Air Data Modul) і далі у вигляді цифрового сигналу до ADIRU, також до нього надходить сигнал від датчиків кута атаки та температури.
В ADIRU обчислюються:
значення барометричної висоти на основі статичного тиску і температури;
значення дійсної повітряної швидкості на основі порівняння сигналів про повний та статичний тиск з урахуванням температурної поправки;
значення вертикальної швидкості;
значення повної та статичної температури з урахуванням швидкості;
значення поточного кута атаки.
Поясніть принцип дії підсистеми визначення інерціальних параметрів IRS системи ADIRS.
В бесплатформенной инерциальной системе отсчета IRS гироскопы и акселерометры жестко прикреплены к конструкции самолета. Бесплатформенная курсовертикаль IRS с лазерными гироскопами определяет линейное ускорение и угловую скорость.
Яка інформація від ADIRS виводиться на індикацію пілотам?
Приладна повітряна швидкість (IAS), дійсна повітряна швидкість (TAS) вертикальна швидкість (VS), барометрична висота (height), повна (TAT) та статична (SAT) температури, інколи кут атаки.
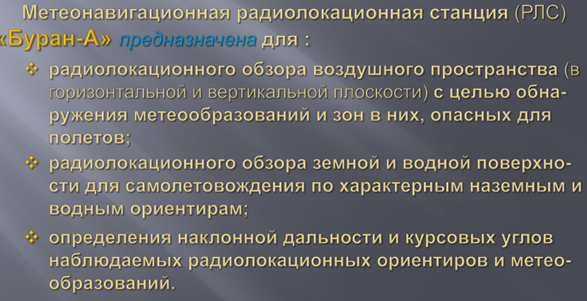
Для чого призначена метеонавігаційна РЛС РЛ?
Поясніть взаємодію МН РЛС РЛ з системами ПС.
Розкажіть про основні технічні характеристики МН РЛС.
МНРЛС це погодний радіолокатор сантиметрового діапазону із несучою частотою 9400 МГц. Антена являє собою хвилевідно-щілинну антенну решітку із кутом розходи мості променя 3º-5º, антена рухома за пеленгом ±90º , за кутом місця ±15º та по крену ±15º. Потужність імпульсного випромінювання 5-20 КВт, максимальна дальність виявлення купчато-дощових хмар – 400…500 км. Антена иа приймач-передавач знаходяться спереду під радіопрозорим носовим обтічником, а пульт керування і дисплейний індикатор в кабіні екіпажу.
Яка інформація МН РЛС відображається для пілотів?
Кути пеленгу та місця небезпечного метеоявища, відстань до нього та його тип за рівнем вологи і відповідно за кольором на екрані.
Поясніть призначення метеорологічної навігаційної радіолокаційної станції МЛ.
МН РЛС призначена для виявлення небезпечних метеоявищ за маршрутом польоту, оповіщення екіпажу про зони небезпечної турбулентності та зносу вітру, створення радіоконтрастного зображення земної поверхні для вирішення завдань навігації та літаководіння.
З яким обладнанням літака взаємодіє МН РЛС МЛ?

Що забезпечує система КСЭИС по інформації від МН РЛС МЛ?
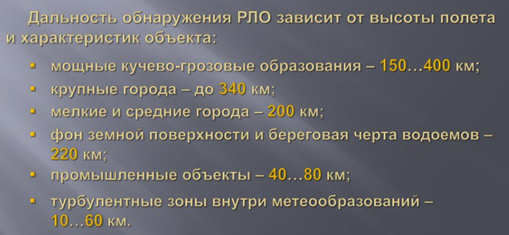
Розкажіть про параметри щодо відстані виявлення об’єктів МН РЛС МЛ?
Поясніть розміщення та призначення пульту керування МН РЛС МЛ.
Пульт керування розміщений на центральному пульті і призначений для вибору режиму роботи МН РЛС МЛ.
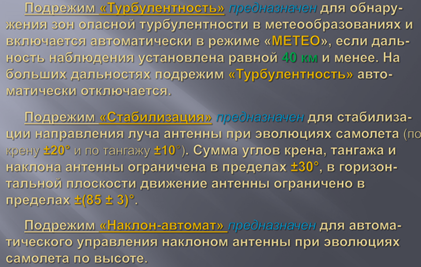
Поясніть режими та підрежими роботи МН РЛС МЛ.
Режим «Тест» (кадр «MAP+WXR/TEST») используется для проверки работоспособности РЛС и каналов ее связей средствами встроенного контроля. Режим «Земля» (кадр «MAP+WXR/M») предназначен для радиолокационного обзора земной и водной поверхности и формирования радиолокационной карты местности. Режим «Метео» (кадр WXR) предназначен для радиолокационного обзора воздушного пространства впереди самолета с целью обнаружения гидрометеообразований и оценки степени их опасности. Подрежим «Профиль» (кадр «WXR/T+PRF») предназначен для просмотра метеообразований в вертикальной плоскости (дальность 40 км).
В яких кутових діапазонах сканує антена МН РЛС МЛ?
Антена рухається за пеленгом ±90º , за кутом місця ±15º та по крену ±15º.
Які повідомлення від МН РЛС МЛ виводяться на індикацію?
Кути пеленгу та місця небезпечного метеоявища, відстань до нього та його тип за рівнем вологи і відповідно за кольором на екрані.
Поясніть призначення та принцип дії радіовисотоміра.
Радіовисотомір призначений для вимірювання значення вертикальної відстані від ПК до земної поверхні. Виміряне значення абсолютної висоти польоту відображається пілоту через відповідний індикатор або через систему електронної індикації. Принцип вимірювання абсолютної висоти польоту полягає у випромінюванні зондувального сигналу з борту ПК та прийманні відбитого від земної поверхні сигналу. За виміряним часом проходження радіосигналу обчислюють значення абсолютної висоти польоту: H = (ct)/2, де с – швидкість поширення радіохвиль; t – час проходження зондувального радіосигналу від ПК до земної поверхні.
Поясніть роботу радіовисотоміра.
В радиовысотомерах применяется радиолокационный принцип определения расстояния (высоты) по отраженному сигналу, то есть в основе действия РВ лежит отражение от земной поверхности излучаемых самолетным передатчиком электромагнитных волн. Передатчик радиовысотомера формирует высокочастотные колебания, которые с помощью передающей антенны А-1 направляются в сторону земной поверхности. Отраженный от земной поверхности сигнал (электромагнитные колебания) распространяется во всех направлениях и, в частности, поступает на приемную антенну А-2 и приемник. Кроме того, в приемную антенну А-2 поступают по кратчайшему расстоянию колебания непосредственно из передающей антенны А-1, так как на самолете передающая и приемная антенны устанавливаются на небольшом расстоянии друг от друга. Измеритель высоты вырабатывает напряжение U(H), пропорциональное времени прохождения сигнала до земной поверхности и обратно, т.е. пропорциональное истинной высоте H.