

ЛР4_Исследование одноконтурной системы регулирования с ПИ- и ПИД-регулятором
.pdfШкола Инженерная школа энергетики НОЦ И.Н. Бутакова
Направление 13.03.01 Теплоэнергетика и теплотехника
Отчет по лабораторной работе по дисциплине «Управление техническими системами»
«Исследование одноконтурной системы регулирования с ПИ- и ПИД-
регулятором»
Выполнил студент |
|
|
|
гр. 5Б05 |
|
|
Цыбиков А.А. |
|
(дата, подпись) |
||
Проверил: |
|
|
|
|
к.т.н., доцент ИШЭ |
|
|
|
Атрошенко Ю.К. |
|
|
(дата, подпись) |
||
Томск 2022

Цель работы
Исследование динамики работы одноконтурной системы автоматического регулирования с ПИ- и ПИД-регулятором. Оценка влияния настроек параметров регулятора на переходный процесс системы автоматического регулирования (САР).
Таблица 1 – Вариант задания
№ варианта |
b0 |
b1 |
a0 |
a1 |
a2 |
|
|
|
|
|
|
2 |
10 |
20 |
10 |
6 |
40 |
|
|
|
|
|
|
Порядок выполнения работы
Сначала построим схему, предоставленную в методических указаниях данных для этой лабораторной работы, и график для нее.
Рисунок 1 – График переходного процесса с ПИ-регулятором
В нашем случае необходимо добиться устойчивости переходного процесса. Изменим коэффициент усиления в усилителе с 1 до 1.2, а в интеграторе с 1 до 0,6. Получаем график переходного процесса САР с ПИ-
регулятором:
2

Рисунок 2 – Переходный процесс САР с ПИ-регулятором
Рассчитываем оценки качества для переходного процесса САР с ПИ-
регулятором: |
|
|
|
|
|
|
|
|
|
||
1) |
Динамическая ошибка 1: 1 = 0,15; |
|
|
||||||||
2) |
Перерегулирование: = |
1∙100% |
= |
|
0,15∙100% |
= 15%; |
|
||||
(∞) |
1 |
|
|||||||||
|
|
|
|
|
|
|
|||||
3) |
Статическая ошибка: ст = − (∞) = 1 − 1 = 0, |
где – величина |
|||||||||
|
сигнала задания. |
|
|
|
|
|
|
|
|
|
|
4) |
Степень затухания: Ѱ = |
1− 2 |
= |
0,15−0 |
= 1, где |
– вторая амплитуда |
|||||
|
|
||||||||||
|
|
|
1 |
|
|
0,15 |
|
2 |
|
||
|
|
|
|
|
|
|
|
||||
колебаний.
5)Время регулирования р = 9 с.
6)Период колебаний: = 6 с.
Подаём на вход объекта управления равномерный шум. Структурная схема САР с ПИ-регулятором представлена на рисунке 3:
Рисунок 3 – Переходный процесс САР с ПИ-регулятором с внешними возмущениями
3

Получаем график переходного процесса САР с ПИ-регулятором
(параметры такие же, как на рисунке 3):
Рисунок 4 – График переходного процесса САР с ПИ-регулятором с внешними
возмущениями
Изменяем закон регулирования с пропорционального-интегрального на пропорционально-интегрально-дифференциальный путём добавления в структуру ПИ-регулятора дифференциальной составляющей
(дифференциатор):
Рисунок 5 – Макроблок ПИД-регулятор
4

Параметры регулятора: коэффициент усиления в усилителе с 1.2, в
интеграторе 0.6, а в дифференциаторе с 1.2. Получаем график переходного процесса САР с ПИД-регулятором:
Рисунок 6 – График переходного процесса САР с ПИД-регулятором с внешними
возмущениями
Рассчитываем оценки качества для переходного процесса САР с ПИД-
регулятором: |
|
|
|
|
|
|
|
|
|
|
|
1) |
Динамическая ошибка 1: 1 = 0,13; |
|
|
||||||||
2) |
Перерегулирование: |
= |
1 |
∙100% |
= |
0,13∙100% |
= 11,93%; |
|
|||
(∞) |
1,09 |
|
|
||||||||
|
|
|
|
|
|
|
|
||||
3) |
Статическая |
ошибка: |
|
|
ст = − (∞) = 1 − 1,09 = −0,09, |
где |
|||||
|
– величина сигнала задания. |
|
|
|
|
|
|||||
4) |
Степень затухания: |
Ѱ = |
1− 2 |
= |
0,13−0,09 |
= 0,308, где – |
вторая |
||||
|
|
||||||||||
|
|
|
|
|
|
1 |
|
0,13 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
||
амплитуда колебаний.
5)Время регулирования р = 16 с.
6)Период колебаний: = 8 с.
5
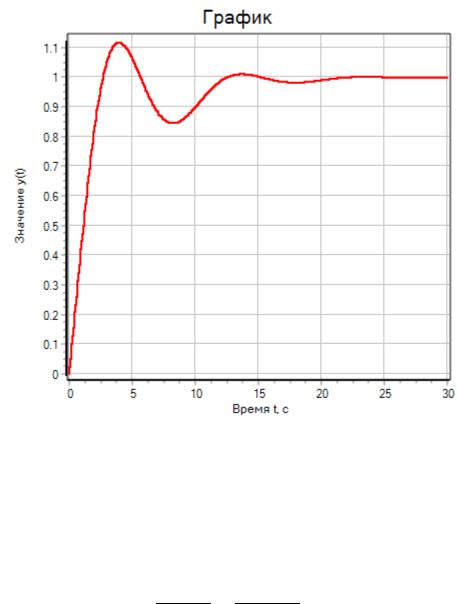
Снимаем внешние возмущающие воздействия на объект управления путём
удаления их схемы блока генератора равномерного шума.
Рисунок 7 – График переходного процесса САР с ПИД-регулятором без внешних
возмущений
Рассчитываем оценки качества для переходного процесса САР с ПИД-
регулятором:
1) Динамическая ошибка 1: 1 = 0,12;
2) Перерегулирование: = 1∙100% = 0,12∙100% = 12%;
(∞) 1
3)Статическая ошибка: ст = − (∞) = 1 − 1 = 0, где – величина сигнала задания.
4) |
Степень затухания: Ѱ = |
1− 2 |
= |
0,12−0,01 |
= 0,917, где – вторая |
|
|
||||
|
|
1 |
|
0,12 |
2 |
|
|
|
|
||
|
амплитуда колебаний. |
|
|
|
|
5) |
Время регулирования р = 16 с. |
|
|
|
|
6) |
Период колебаний: = 8 с. |
|
|
|
|
Сведем полученные результаты в таблицу 2.
6
Таблица 2 - Оценка качества переходных процессов исследуемой САР
№ |
Оценка качества |
САР с ПИ- |
САР с ПИД- |
САР с ПИД- |
п/п |
|
регулированием |
регулированием |
регулированием |
|
|
(ручная |
с внешними |
без внешних |
|
|
настройка |
возмущениями |
возмущений |
|
|
параметров) |
(ручная |
(ручная |
|
|
|
настройка |
настройка |
|
|
|
параметров) |
параметров) |
|
|
|
|
|
1 |
Динамическая ошибка 1 |
0.15 |
0,13 |
0,12 |
|
|
|
|
|
2 |
Перерегулирование |
15% |
11.93% |
12% |
|
|
|
|
|
3 |
Статическая ошибка ст |
0 |
−0.09 |
0 |
|
|
|
|
|
4 |
Степень затухания |
1 |
0.308 |
0,917 |
|
|
|
|
|
5 |
Время регулирования: р |
9 |
16 |
16 |
|
|
|
|
|
6 |
Период колебаний к |
6 |
8 |
8 |
|
|
|
|
|
Анализ полученных данных
В ходе лабораторной работы была исследована динамика работы одноконтурной системы автоматического регулирования с ПИ- и ПИД-
регулятором. А также проведена оценка влияния параметров настройки регулятора на переходный процесс системы. Были сделаны следующие выводы:
1)При внешних возмущающих воздействий на объект управления появляется статическая ошибка, отражаемая на степени затухания.
2)Динамическая ошибка и время регулирования при одинаковых параметрах настройки ПИ- и ПИД-регулятора отличается: у ПИД-
регулятора данные показатели ниже.
7