

ЛР2_Оценка качества переходных процессов систем автоматического регулирования
.pdfШкола Инженерная школа энергетики НОЦ И.Н. Бутакова
Направление 13.03.01 Теплоэнергетика и теплотехника
Отчет по лабораторной работе по дисциплине «Управление техническими системами»
«Оценка качества переходных процессов систем автоматического регулирования»
Выполнил студент |
|
|
|
гр. 5Б05 |
|
|
Цыбиков А.А. |
|
(дата, подпись) |
||
Проверил: |
|
|
|
|
к.т.н., доцент ИШЭ |
|
|
|
Атрошенко Ю.К. |
|
|
(дата, подпись) |
||
Томск 2022

Цель работы
Изучение метода оценки качества переходных процессов систем
автоматического регулирования с помощью прямых оценок.
Апериодическое звено
Таблица 1 – Вариант задания
№ варианта |
Коэффициент |
Постоянная |
Постоянная |
Постоянная |
|
усиления K |
времени T |
времени T1 |
времени T2 |
|
|
|
|
|
2 |
2.7 |
10 |
2.6 |
2 |
|
|
|
|
|
Порядок выполнения работы
Сначала построим схему, предоставленную в методических указаниях
данных для этой лабораторной работы, и график для нее.
Рисунок 1 – График переходного процесса систем автоматического регулирования с
параметрами варианта
Далее необходимо анализируем следующие характеристики:
1) Динамическая ошибка: 1 = 0,5
2) Перерегулирование: = |
1∙100% |
= |
0,54∙100% |
= 54%; |
|
(∞) |
1 |
||||
|
|
|
|||
|
|
2 |
|
|
3)Статическая ошибка: ст = − (∞) = 1 − 1 = 0, где – величина сигнала задания.
4) Степень затухания: Ѱ = |
1− 2 |
= |
0,54−0,2 |
= 0,63, где – вторая |
|
|
|||
|
1 |
|
0,54 |
2 |
|
|
|
амплитуда колебаний.
5)Время регулирования: р = 28 с.
6)Период колебаний: к = 11 с.
Число колебаний за время регулирования 3
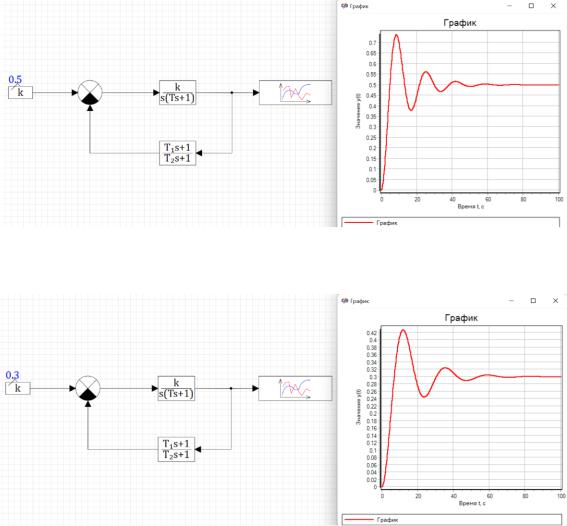
Динамическую ошибку можно уменьшить путем уменьшения входящего сигнала. Поэтому изменим значение коэффициента усиления с 2.7 на 1.3, а
входной сигнал с 1 на 0.5.
Рисунок 2 – График переходного процесса систем автоматического регулирования с параметрами k = 1.3, T = 10, Т1 = 2.6, Т2 = 2
Рисунок 3 – График переходного процесса систем автоматического регулирования с параметрами k = 0.7, T = 10, Т1 = 2.6, Т2 = 2
3

Рисунок 4 – График переходного процесса систем автоматического регулирования с
параметрами k = 0.2, T = 10, Т1 = 2.6, Т2 = 2
При изменении коэффициента усиления в меньшую сторону видно, что на новых графиках колебаний становится все меньше и меньше. При изменении входного сигнала размер статистической ошибки приближается к нулю.
Вывод
В ходе проведения данной лабораторной работы был изучен метод оценки переходных процессов систем автоматического регулирования с помощью прямых оценок и выполнено задание, по результатам которого установлено, что при уменьшении значений коэффициента усиления и входного сигнала динамическая ошибка в импульсном регуляторе будет уменьшаться.
4