

3380
.pdfУДК 303.732.4:623.746.-519
А.В. Мельников
СИСТЕМНЫЙ АНАЛИЗ ОСНОВНЫХ ЭТАПОВ ФУНКЦИОНИРОВАНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО
АППАРАТА
Вработе проведен системный анализ состояний функционирования беспилотного летательного аппарата (БЛА), составлена обобщенная графовая модель, формально отражающая влияние дестабилизирующих воздействий (ДВ) на систему управления (СУ) полетом по заданной траектории
Внастоящее время беспилотные комплексы, относятся к
одной из наиболее динамично прогрессирующих областей авиационной техники. Практически во всех развитых странах мира они находят применение при решении достаточно широкого круга задач экологического мониторинга, выявления последствий природных и техногенных катастроф, используются для обеспечения проведения операций органами МВД, ФСБ и ВС РФ. Во многих научных организациях активно проводятся мероприятия, направленные на повышение эффективности применения БЛА. Снижение вероятности выхода из строя авиационной техники, а также расхода сил и средств на её обслуживание являются перспективными направлениями исследований. Основные требования, которые выдвигаются ксовременным БЛА, являются сравнительно невысокая стоимость производства, простота технического обслуживания и эксплуатации, а также живучесть при оказании на них ДВ со стороны внешних факторов.
В работе [1] представлена графовая модель состояний функционирования БЛА. Данный граф довольно подробно описывает весь цикл применения БЛА, начиная с момента подготовки к выполнению конкретного полетного задания и заканчивая ремонтом и послеполетными профилактическими работами. Однако, для проведения исследований влияния ДВ на СУ полетом БЛА по заданной траектории, необходимо детализировать вышеупомянутый граф, который бы учитывал влияние существующих ДВ на заданную траекторию полета БЛА на всех эта-
61
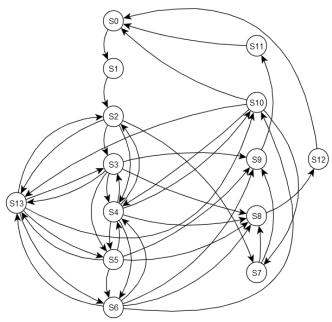
пах полета. С учетом этого, детализированная графовая модель представлена на рисунке
Детализированная графовая модель функционирования БЛА в условиях ДВ
Будем рассматривать следующие состояния БЛА:
S0 – БЛА исправен и может быть использован по целевому назначению;
S1 – подготовка к выполнению конкретного полетного задания;
S2 – взлет БЛА;
S3 – решение навигационной задачи при полете к зоне выполнения полетного задания по рассчитанной траектории;
S4 – преодоление различных ДВ;
S5 – выполнение полетного задания;
62
S6 – решение навигационной задачи при полете к аэродрому посадки;
S7 – повреждение БЛА при взлете/посадке на аэродроме; S8 – полный выход из строя БЛА, отсутствует возмож-
ность его восстановления;
S9 – полный выход из строя с точки зрения функционирования, однако возможен ремонт и дальнейшее использование;
S10 – выполнение посадки на аэродроме;
S11 – ремонт или профилактические работы;
S12 – использование резервных БЛА;
S13 – получение корректировки выполнения полетного задания с наземного пункта управления.
Из представленной графовой модели следует, что БЛА может находиться в одном из конечного числа состояний
S0, S1, ..., Sn 1; n 13 . В определенные моменты времени
k (k 1,...) система может случайным образом переходить из
одного состояния Si |
в другое |
Sj с некоторой переходной ве- |
|
роятностью Pij( k). |
Такая марковская цепь |
с применением |
|
формулы полной вероятности описывается уравнениями [2]: |
|||
|
n |
n |
|
PjPji |
Pj Pji |
(1) |
|
i 1 |
i 1 |
|
|
i j |
j i |
|
|
Будем считать цепь однородной, тогда уравнение (1) примет вид:
Pij(k) Pij .
Для описания марковской цепи применим соотношение
63
n |
|
Pi PjPji , |
(2) |
j1
сдополнительным ограничением:
n |
|
Pi 1. |
(3) |
i 1 |
|
Для графа состояний, описывающего динамику функционирования БЛА, приведенного на рис. 1, система уравнений (2) имеет вид:
P0P0,1 |
P10 P10,0 P11 P11,0 P12 P10,0 |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
PP |
P P |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
1 1,2 |
|
|
0 |
0,1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
P (P |
|
P |
|
P |
|
P |
|
) P P |
P P |
|
|
|
|
|
|
|
||||||||||||
|
2 |
2,3 |
|
2,4 |
|
2,7 |
|
2,13 |
|
|
4 |
4,2 |
|
13 |
|
13,2 |
|
|
|
|
|
|
||||||
P (P |
|
P |
|
P |
|
P |
P |
|
) P P |
P P |
|
P P |
|
|||||||||||||||
|
3 |
3,4 |
|
3,5 |
|
3,8 |
3,9 |
|
|
3,13 |
|
2 |
|
2,3 |
|
4 |
4,3 |
|
|
13 |
13,3 |
P6, |
||||||
P4(P4,2 |
P4,3 |
P4,5 |
P4,6 P4,8 P4,9 |
P4,10) P2 |
P2,4 |
P3 P3,4 P5 P5,4 P6 |
||||||||||||||||||||||
P (P |
|
P |
|
P |
|
P |
P |
|
) P P |
P P |
|
P P |
|
|||||||||||||||
|
5 |
5,4 |
|
5,6 |
|
5,8 |
|
5,9 |
|
|
5,13 |
|
3 |
|
3,5 |
|
4 |
4,5 |
|
|
13 |
13,5 |
|
|||||
P (P |
|
P |
|
P |
|
P |
|
P |
|
) P P |
|
P P |
|
P P |
|
|||||||||||||
|
6 |
6,4 |
|
6,8 |
|
6,9 |
|
6,10 |
|
|
6,13 |
|
4 |
4,6 |
|
5 |
5,6 |
|
13 |
13,6 |
|
|||||||
P (P |
|
P ) P P |
|
P P |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
7 |
7,8 |
|
7,9 |
|
|
2 |
2,7 |
|
10 |
|
10,7 |
|
|
|
|
|
|
|
|
|
|
(4) |
|||||
P P |
|
|
P |
P |
|
P P |
|
|
P P |
P P |
P P |
|
|
|||||||||||||||
8 |
8,12 |
|
3 |
3,8 |
|
4 |
|
4,8 |
|
5 |
5,8 |
|
6 |
|
6,8 |
|
7 |
|
7,8 |
|
|
|||||||
P P |
|
|
P P |
|
P P |
|
P P |
P P |
P P |
|
|
|
||||||||||||||||
|
9 |
9,11 |
|
3 |
3,9 |
|
4 |
|
4,9 |
|
5 |
5,9 |
|
6 |
|
6,9 |
|
7 |
|
7,9 |
|
|
||||||
P10(P10,0 P10,4 P10,7 |
P10,13) P4 P4,10 P5 P5,10 |
P6 P6,10 |
|
|||||||||||||||||||||||||
P |
P |
|
|
P P |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
11 |
11,0 |
|
9 |
9,11 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
P |
P |
|
|
|
P P |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
12 |
12,0 |
|
8 |
8,12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
(P13,2 P13,3 |
P13,5 |
P13,6 |
P13,10) P2 |
P2,13 P3 P3,13 |
P5 P5,13 P6 P6,13 |
P1 |
||||||||||||||||||||
P13 |
||||||||||||||||||||||||||||
Полученная система уравнений (4) представляет собой модель функционирования БЛА в условиях оказания ДВ. Для решения этой системы необходимо определить вероятности
нахождения БЛА в состояниях P1,P2,...,P13. Решение системы линейных алгебраических уравнений (4) может быть получено с использованием одного из известных численных методов, например методом Гаусса, что является направлением дальнейших исследований.
64
Литература
1.Мельников А.В. Построение оптимальной траектории полета беспилотного летательного аппарата при выполнении задачи поиска [Текст] / А. В. Мельников, В. А. Гайдай, Е. А. Рогозин // Вестник Воронежского института МВД России. – 2017.
–Вып. №1. – С. 52–63.
2.Боевые комплексы беспилотных летательных аппаратов. Науч. метод.материалы. Ч.1. Издание ВВВИА имени проф. Н.Е. Жуковского, 2005. 236 с.
Воронежский государственный технический университет
65
УДК 623.746.-519:551.5
А.В. Мельников
РАСЧЕТ ЭФФЕКТИВНОСТИ ПРИМЕНЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА С УЧЕТОМ ДЕСТАБИЛИЗИРУЮЩИХ ВОЗДЕЙСТВИЙ, ВЛИЯЮЩИХ
НА ЗАДАННУЮ ТРАЕКТОРИЮ ПОЛЕТА
В статье приведена классификация беспилотных летательных аппаратов (БЛА) по трем основным признакам: массогабаритным размерам, назначению, типу управления, проведен анализ влияния наиболее значащих дестабилизирующих воздействий (ДВ) природного и техногенного характера, составлена классификация (ДВ), оказывающих влияние на заданную траекторию полета БЛА, предложен способ расчета показателя эффективности функционирования БЛА
История успешного применения БЛА насчитывает уже почти восемь десятилетий. В последнее время интерес к ним намного возрос. По мнению некоторых экспертов, беспилотные летательные аппараты являются наиболее перспективным направлением развития авиации. Это объясняется не только тем, что массовое производство и применение БЛА оказывается дешевле и проще, чем пилотируемых летательных аппаратов, но и тем, что некоторые типы БЛА способны решать задачи, недоступные пилотируемым летательным аппаратам, к примеру, задачи ближней разведки в условиях плотной городской застройки. Повреждение БЛА в ходе выполнения боевой задачи несет лишь финансовые потери и не угрожает жизни пилотаоператора, что позволяет использовать БЛА в рискованных операциях [1].
В настоящее время существует большое количество разнообразных модификаций БЛА и для удобной их классификации, БЛА разделяют по трем основным признакам:
-массогабаритные размеры;
-назначение;
-тип управления.
Исходя из массогабаритных размеров БЛА, выделяют[2]: - «микро» – массой до 10 килограммов, временем полёта
около 1 часа и высотой до 1 километра;
66
-«мини» – массой до 50 килограммов, временем полёта несколько часов и высотой до 3 – 5 километров;
-средние («миди») – до 1 000 килограммов, временем 10
–12 часов и высотой до 9 – 10 километров;
-тяжёлые – с высотами полёта до 20 километров и временем полёта 24 часа и более.
Среди большого разнообразия выполняемых задач, БЛА по своему назначению бывают [3]:
-разведывательные;
-целеуказания;
-постановки помех;
-системы дистанционного контроля и наблюдения;
-комплексы воздушной ретрансляции;
-многоцелевые беспилотные комплексы;
-ударные и др.
В зависимости от типа управления беспилотные летательные аппараты подразделяются на неуправляемые – БЛА движущиеся по заранее заданным контрольным точкам, дистан- ционно-пилотируемые и автономные. Управление, в первом и втором способе, ориентировано на человека и не учитывает новые технические возможности существующих и перспективных систем. Сегодня на смену дистанционно-пилотируемым аппаратам приходят автономные аппараты, способные самостоятельно выполнять поставленную задачу при минимальном вмешательстве человека-оператора.
Сложность разработки автоматической системы управления, которая была бы способна выполнять управление полетом БЛА в автономном режиме, заключается в том, что на БЛА за время выполнения полетного задания с большой вероятностью будут оказаны какие-либо ДВ, влияния которых необходимо учитывать при разработке алгоритма управления.
Учитывая разнообразие ДВ, оказывающих отрицательное влияние на систему управления полета БЛА по заданной траектории [4, 5], составим классификацию ДВ, рис. 1.
67
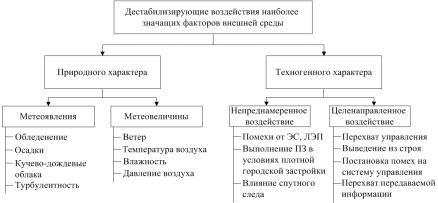
Рис. 1. Классификация ДВ
Последствия влияния ДВ на систему автономного управления полетом БЛА могут быть самыми разнообразными – начиная с отклонения БЛА от оптимальной траектории полета заканчивая заклиниванием рулей управления или электродвигателей, что может привести к крушению БЛА. В целях предупреждения таких последствий система управления должна своевременно отреагировать на оказанное возмущение таким образом, чтобы обеспечить минимальное влияние ДВ. Это может быть достигнуто путем изменения высоты или курса полета БЛА в целях облета неблагоприятного участка. Однако в этом случае необходимо учитывать показатель эффективности функционирования системы управления БЛА Z[6], который рассчитывается исходя из соотношения длины траектории, на которой произошло отклонение от оптимального маршрута, к общей длине рассчитанной траектории, выраженный в процентах:
|
|
|
|
|
|
|
Z 1 |
|
*100% |
, |
(1) |
||
|
||||||
|
|
|
|
|
|
|
|
lопт |
|
|
|
||
1 2 ... n, |
|
(2) |
||||
68
где Z – показатель эффективности системы управления полетом БЛА;
– участок, на котором происходит отклонение полета от оптимальной траектории;
lопт – общая длинна рассчитанной (оптимальной) тра-
ектории;
n – количество участков, на которых произошло отклонение от оптимальной траектории.
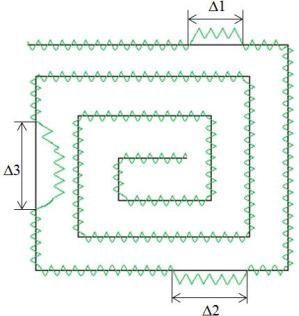
Как показано на рис. 2, в случае если система управления не справляется с оказанными ДВ, происходит отклонение траектории полета от оптимальной [6]. Это может привести к тому, что задача не будет выполнена в установленное время.
 - рассчитанная (оптимальная) траектория,
- рассчитанная (оптимальная) траектория,  - реальная траектория
- реальная траектория
Рис. 2. Влияние ДВ на траекторию полета БЛА
69
Динамический показатель эффективности функционирования БЛА ЕДПЭФБЛА определяется исходя из неравенства:
ЕДПЭФ БЛА P tПЗ tmax ПЗ , |
(3) |
где ЕДПЭФБЛА – динамический показатель эффектив-
ности функционирования БЛА;
P – вероятность выполнения полетного задания (ПЗ) в установленное время;
tmax ПЗ – максимально допустимое время нахождения БЛА в воздухе, указано в технической документации;
tПЗ – рассчитанное время, необходимое для выполне-
ния ПЗ.
Таким образом, вероятность выполнения ПЗ будет максимальной, если рассчитанное время необходимое для выполнения ПЗ будет меньше или равно максимально допустимому времени нахождения БЛА в воздухе, которое указывается в так- тико-технических характеристиках для каждой модели БЛА. Время выполнения задания может быть увеличено в связи с отклонением БЛА от оптимальной траектории полета, поэтому разработка надежной системы автономного управления является актуальной задачей и дальнейшие исследования необходимо провести для ее решения.
Литература
1.Иванов Д.Я. Методы роевого интеллекта для управления группами малоразмерных беспилотных летательных аппаратов[Текст] / Д.Я. Иванов // Известия юфу. технические науки.
–2011. – № 3 (116). – С. 221–229.
2.Каршов Р.С. Классификация беспилотных летательных аппаратов[Текст] / Р.С.Каршов// Проблемы современной науки и образования. – 2016. – № 11 (53).
70