

Передача информации в распределенных информационно-управляющих сист
..pdfсистемы как в режиме эмуляции технологического оборудования, так и с подключенным оборудованием;
настройка сетевых коммуникаций (модемов, коммутаторов, маршрутизаторов, шлюзов, коммуникационных контроллеров, серверов и т.п.);
создание баз данных и подключение к ним SCADAкомпонентов (периферийной инфраструктуры);
сетевая диагностика и др.
SCADA – управляющий центр (аналог диспетчерского центра МСТМ) осуществляет централизованный контроль и управление полевыми узлами (КП, ИП) как по магистральным (протяженным), так и по локальным коммуникациям (линиям связи). Технологическая информация, в частности команды ТУ (на основании сообщений ТС, ТИ), передаются на удаленные станции автоматически или диспетчером (см. рис. 1.4). Известительная информация по трактам ТК (ТИ, ТС) поступает в пункт управления (ПУ), он же диспетчерский пункт (ДП), на диспетчерский щит (ДЩ) или пульты (мониторы) и БД из периферийных узлов в соответствии с реализуемой дисциплиной обслуживания. Аналогично циркулирует в сети административная информация, поддерживающая эффективное функционирование и эксплуатацию МСТМ (РИУС, SCADA).
DCS-системы (Distributed Control System) можно рассматри-
вать как аналог МСТМ для сосредоточенных промышленных объектов, таких как электростанции, нефте- и газоперерабатывающие установки (заводы), химические и пищевые предприятия, т.е. предприятия процессно-ориентированной индустрии, располагаемые на ограниченной территории.
DCS интегрирует рабочую информацию (ТС, ТИ) и административную информацию, управляет конфигурациями многих подсистем – контролируемых пунктов (КП, он же исполнительный пункт ИП), которые, в свою очередь, локально управляют локализованными технологическими процессами, используя программируемые логические контролеры (ПЛК, они же PLC). Структура DSC представлена на рис. 1.6.
21
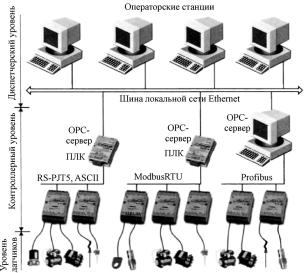
Рис. 1.6. Струк ура DSC-системы как пример 3-уровневой МСТМ для сосредоточенных объектов
ПЛК (PLC)-системы – это, по сути, интеллектуальные локальные приборные системы (замкнутые системы-регуляторы), управляющие промышленным оборудованием с дискретными и не рерывными пр цессами. PLC в структуре КП (ИП) используют в составе SCA DA и DSC как первичные компоненты на основе локальных промышленных систем из полевых приборов
в небольших |
управляющих системных конфигурациях, |
выпол- |
няю щих автоматизированное регулирование параметров |
произ- |
|
водственных |
процессов (отрабатывая соответству ющие |
законы |
регулирования) (рис. 1.7 и 1.8).
Еще отметим, что DCS- и PLC-с стемы в значительно большей степ ни используются при управлении технологическими процессами в замкнутых контурах, нежели SC ADA-системы (АСДУ, для рассредоточенных объектов), а это в ряде случаев сложнее реализовать, чем испетчерскоеуправлениевраспределенныхпроцессах(имеется в ви у сравнение вариантов автоматических и автоматизированных сист м, отсюдамогутбытьразныетребованиякзадержкам, скорости обмена, надежности, безопасностиит.д.).
22
Человеко-машинный интерфейс (ЧМИ)
Установка точек, алгоритмов управления, ограничений параметров обработки данных
Контроллер
Изменяемые (манипулируемые) переменные 
Исполнит. механизмы 




Управляемый Входные
 процесс данные
процесс данные
Помехи
Удаленная диагностика и обслуживание
Управляемые  переменные
переменные 
Выходные
данные
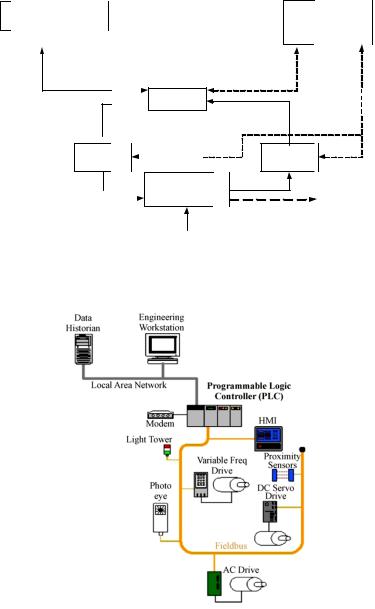
Рис. 1.7. Операциипромышленнойуправляющейсистемы(инфраструктуры), реализуемые ПЛК (P LC) – контроллерный уровень SCA DA или DCS (МСТМ)-систем, т.е. уровень КП (ИП)
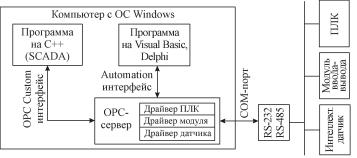
Рис. 1.8. Локальная система управления на основе ПЛК
23
Применение современных типовых информационных технологий (WEB, OPC) при создании РИУС (МСТМ, SCADA,
DCS и PLC-систем)
Рассмотрим применение некоторых современных информационных технологий при создании SCADA (МСТМ, DCS)-систем.
В последние годы большой интерес вызывало использование интернет-технологий в задачах управления, причем не только на уровне корпоративного управления (SCADA, DCS), но даже на уровне технологического оборудования (PLC). Для этих целей используются web-серверы, которые могут быть расположены как на обычных персональных компьютерах, так и непосредственно в контроллерах или модулях ввода-вывода (так называемые мик- ро-web-серверы). С помощью любого web-браузера (просмотрщика), например Internet Explorer, можно управлять технологическими процессами, открыв на микро-web-сервере интернет-страничку с мнемосхемой технологического процесса.
Стандарт ОРС (OLE for Process Control – OLE для управле-
ния процессами) лежит в основе современных SCADA-пакетов, взаимодействующих с аппаратурой через ОРС-сервер.
Технология OLE (Object Linking and Embedding – связывание и внедрение (встраивание) объектов была разработана фирмой
Microsoft.
Стандарт ОРС обеспечивает сопряжение с интерфейсами различных типов «полевой шины» (fieldbus) как физических устройств, так и SCADA-пакетов, взаимодействующих с аппаратурой через ОРС-сервер. Главной целью стандарта ОРС явилось обеспечение возможности совместной работы (интероперабельности, возможность портации) средств автоматизации, функционирующих на разных аппаратных платформах, в разных промышленных сетях и производимых разными фирмами.
Стандарт разработан международной организацией ОРС Foundation, членами которой являются более 400 фирм, работающих в области средств автоматизации и измерительной техники. Первая версия стандарта ОРС была выпущена в 1998 г.
24
До разработки стандарта ОРС SCADA-пакет (диспетчерский или операторский уровень системы) нужно было адаптировать к каждому новому оборудованию индивидуально. При модификации оборудования нужно было вносить изменения во все драйверы, каждый из которых поддерживал протокол обмена только с одной клиентской программой. Число таких драйверов доходило до сотен.
После появления стандарта ОРС практически все SCADAпакеты были перепроектированы как ОРС-клиенты, а каждый производитель аппаратного обеспечения стал снабжать свои контроллеры, модули ввода-вывода, интеллектуальные датчики и исполнительные устройства стандартным ОРС-сервером.
Применение ОРС-сервера при разработке заказных программ на С++, Visual Basic, VBA, Delphi и т.п. позволяет скрыть от раз-
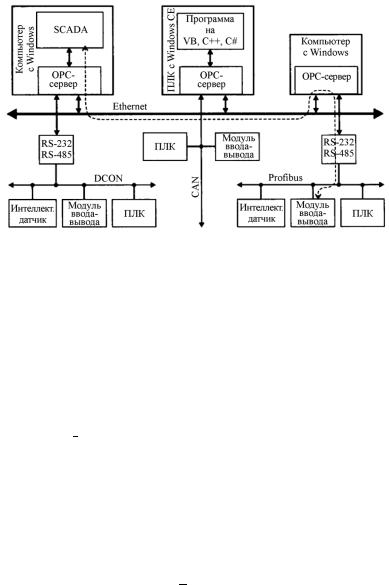
работчика всю сложность общения с аппаратурой, представляя простой и удобный метод доступа к аппаратуре через интерфейсы СОМ-объекта (рис. 1.9).
Рис. 1.9. Простой пример взаимодействия прикладных программ и физических устройств через ОРС-сервер на одном компьютере
Благодаря появлению стандартизации интерфейса стало возможным подключение любого физического устройства к любой SCADA, если они оба соответствовали стандарту ОРС. Стандарт ОРС относится только к интерфейсам, которые ОРС-сервер предоставляет клиентским программам. Метод же взаимодействия сервера с аппаратурой (например, с модулями ввода-вывода)
25

стандартом не предусмотрен, и его реализация возлагается полностью на разработчика аппаратуры.
Поэтому стандарт ОРС может быть использован не только для взаимодействия SCADA с «железом», но и для обмена данными с любым источником данных, например с базой данных или с GP S-приемником. Реализация подобного обмена (интерфейса) также возлагается на инициатора обм ена.
На рис. 1.10 показано диалоговое окно ОРС-сервера (Nl opc) одной из АСДУ (S CADA). Сервер позволяет выполнить поиск физических устройс в, подключенны х к СОМ-порту компьютера.
Окн |
сервера слева показывает, чт к компьютеру подключены |
три |
одуля ввода: N L16HV, NL8TI и NL8AI. |
|
Для удобства представления измеряемых величин (тегов) на |
объекте автоматизации имена тегов могут быть составными, и пу ь к тегу может быть представлен в виде дерева (см. рис. 1.10).
Рис. 1.10. Пример диалогового кна ОРС-сервера Nlopc
Имя выделенного на рисунке тега в глядит как
«NL 8TI.Laboratory32.Top.Vin4». Все имена и их структура зада-
ются с помощью средств окна ОРС-сервера.
Примеры архитектуры систем, включающих ОРС-серверы и ОРС-клиентов, показаны на рис. 1.11. В качестве ОРС-клиента мож т выступать программа на языке С++ (например, клиентские приложения SCADA-пакета) или программа на язык Visual Basic,
26
VBA, Delphi или любая другая программа, поддерживающая внедрен е СОМ-объектов.
Рис. 1.11. Пример |
применения ОРС-технологии для |
етевого |
доступа |
данным в системах автоматизации |
|
Программа на языке С++ взаим одействует с ОРС-сервером |
||
через интерфейс ОРС |
Custom, а программа на Visual |
Basic, VBA, |
Delph i – через интерфейс автоматизации ОРС Auto mation. ОРСсервер и ОРС-клиенты могут работать только на компьютерах и контроллерах с операционными системами, подде живающими технологию DCOM ( апример, Windo ws ХР и Windo s СЕ).
ОРС-сервер под лючается к физическим устройствам любым способом; эти способы стандартом не предусмотрены. Например, сервер OPC использует для каждого физического устройства свой драйвер (см. рис. 1.9).
Клиентская программа и ОРС-сервер могут быть установлены н одном и том же компьютере, как показано на рис. 1.9, или на разных компьютерах сети Ethernet (рис. 1.11). При наличии нескольких компьютеров каждый из них может сод ржать ОРСсервер и подключен ые к нему физические устройства. В такой системе любой ОРС-клиент с любого компьютера может обра-
27
щаться к любому ОРС-серверу, в том числе к расположенному на другом компьютере сети. Обратим внимание, что компьютеры и контроллеры в такой архитектуре могут работать с разными промышленными сетями.
При использовании оборудования разных производителей на компьютере (контроллере) может быть установлено несколько ОРС-серверов разных производителей, однако ОРС-сервер монопольно занимает СОМ-порт компьютера (поскольку непрерывно выполняет обновление данных), поэтому число портов должно быть равно числу ОРС-серверов. К разным портам компьютера могут быть подключены разные промышленные сети. В этом случае ОРС-серверы выполняют функцию межсетевых шлюзов.
Требования и основная функциональная спецификация современных РИУС (МСТМ, АСДУ, SCADA)
Современные МСТМ (SCADA-системы) должны удовлетворять следующим требованиям (неполный перечень):
масштабируемость (наращиваемость системы без изменения характеристик);
открытость (соответствие стандартам, доступность аппа- ратурно-программного и информационного обеспечения);
надежность (аппаратная, программная, информационная);
информационная безопасность;
робастность (нечувствительность к ошибкам пользователя, защищенность от вандалов и враждебных элементов, устойчивость к ошибкам в исходных данных);
модульность (позволяет повысить скорость изготовления заказной комплектации системы в зависимости от поставленной задачи, используя типовые модули). Типовыми модулями могут быть, например, модуль ввода-вывода, модуль визуализации, модуль алармов, модуль трендов, модуль отчетов, модуль коммерческого учета энергоресурсов и др.;
развитый и эргономичный человеко-машинный интерфейс
(ЧМИ) (HMI – Human-Machinery Interface) и наличие экспертных подсистем.
28
Кроме указанных требований, на этапе эксплуатации функциональная спецификация (профиль) SCADA как системы диспетчерского управления и мониторинга технологического процесса должна включать следующие операции, обеспечиваемые
SCADA-пакетом:
взаимодействие с оператором (выдача визуальной и слуховой информации, передача в систему команд оператора);
помощь оператору в принятии решений (функции экспертной системы);
автоматическая сигнализация об авариях и критических ситуациях;
выдача информационных сообщений на пульт оператора;
ведение журнала событий в системе;
извлечение информации из архива и представление ее оператору в удобном для восприятия виде;
подготовка отчетов (например, распечатка таблицы температур, графиков смены операторов, перечня действий оператора);
учет наработки технологического оборудования.
Ряд задач и соответствующие требования к АСДУ(SCADA) определяются спецификой объекта автоматизации и отраслью. Кроме того, выше анализировались возможности SCADA-пакета как инструментальной среды для разработки программного обеспечения ДП (ПУ).
Контрольные вопросы
1.Приведите классификацию распределенных информаци- онно-управляющих систем (РИУС).
2.Перечислите основные характеристики сетей нового поколения NGN.
3.Раскройте понятие мультисервисности.
4.Раскройте понятие мультипротокольности.
5.Опишите назначение и основные характеристики SCADAсистем.
6.Сформируйте назначение и задачи стандарта OPC.
29
Глава 2. СИСТЕМЫ И СЕТИ С КОММУТАЦИЕЙ КАНАЛОВ. ОБЩАЯ ХАРАКТЕРИСТИКА, МОДЕЛИ
2.1. Системы и сети с коммутацией каналов
Среди множества возможных подходов к решению задачи коммутации каналов между узлами в сетях выделяют два основополагающих принципа: коммутация каналов (circuit switching),
коммутация пакетов (packet switching).
При коммутации каналов коммутационная сеть образует между конечными узлами непрерывный составной физический канал из последовательно соединенных коммутаторами промежуточных канальных участков. Условием того, что несколько физических каналов при последовательном соединении образуют единый физический канал, является равенство скоростей передачи данных в каждом из составляющих физических каналов. Равенство скоростей означает, что коммутаторы такой сети не должны буферизовать передаваемые данные.
В сети с коммутацией каналов перед передачей данных необходимо выполнить процедуру установления соединения, в процессе которой и создается составной канал. И только после этого можно начинать передавать данные.
Достоинства сетей с коммутации каналов:
постоянная и известная скорость передачи данных по установленному между конечными узлами каналу. Это дает пользователю сети возможность на основе заранее произведенной оценки, необходимой для качественной передачи данных пропускной способности, установить в сети канал нужной скорости;
низкий и постоянный уровень задержки передачи данных через сеть. Это позволяет качественно передавать данные, чувствительные к задержкам (называемые также трафиком реального времени) – голос, видео, различную технологическую информацию.
Недостатки сетей с коммутации каналов:
отказ сети в обслуживании запроса на установление соединения. Такая ситуация может сложиться из-за того, что на не-
30