

Электрические машины конспект лекций
..pdfРис. 18.2. Упрощенные векторные диаграммы синхронного двигателя при изменении нагрузочного момента на валу и изменении тока возбуждения
личина cos . Векторная диаграмма для этого случая изображена на рис. 18.2, á. Если двигатель работает при cos 1, то этому
|
|
|
|
режиму соответствует ЭДС E 01 и некоторый угол 1 . При умень- |
|||
|
|
|
|
шении тока возбуждения ЭДС E 0 |
снижается до E 02 . Поскольку |
||
активная мощность остается неизменной, из условия |
|||
Pýë Pýì |
mUE 0 |
|
sin const |
X ñí |
|
||
|
|
|
|
получим, что
E 01 sin 1 E 02 sin 2 ,
откуда следует, что конец вектора E 0 при изменении тока возбуждения будет перемещаться по прямой ÂÑ, параллельной векто-
|
|
|
. Из векторной диа- |
ðó U c и проходящей через конец вектора E |
0 |
||
граммы видно, что угол 2 будет больше 1 .
Аналогично строится диаграмма при увеличении тока воз-
|
|
|
|
буждения. В этом случае ЭДС E |
0 |
возрастает до величины E |
03 |
è óãîë 3 становится меньшим 1 .
201
Вектор jI a 3 X ñí поворачивается вокруг точки À и соответственно ему изменяет направление вектор тока I a 3 , перпендикулярный вектору jI a 3 X ñí , при этом из условия равенства активных мощностей I a1 cos 1 I a 2 cos 2 I a 3 cos 3 конец вектора тока Ià перемещается по прямой DE, перпендикулярной
векторуU ñ . По диаграмме, приведенной на рис. 18.2, можно построить U-образные характеристики для двигателя I à f I â ,
которые будут иметь такую же форму, как и характеристики для генератора, с той лишь разницей, что для двигателя угол сдвига фаз принято отсчитывать от вектора напряжения се-
òè U c . Поэтому при недовозбуждении ток I à будет отставать от
напряжения сети U ñ , т. е. двигатель будет потреблять из сети реактивную мощность, а при перевозбуждении ток будет опе-
режать напряжение сети U ñ , т. е. двигатель будет отдавать
âсеть реактивную мощность.
18.2.Рабочие характеристики
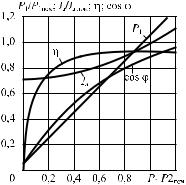
Рис. 18.3. Рабочие характеристики синхронного двигателя
Рабочие характеристики представляют собой зависимости тока Ià, электрической мощности P1, поступающей в обмотку якоря, КПД и cos от отдаваемой механической
мощности |
P2 ïðè U ñ const, |
|||
f ñ const |
è I â const. Часто |
|||
ýòè |
характеристики |
строят |
||
в относительных |
единицах. |
|||
Поскольку |
частота |
вращения |
||
двигателя |
постоянна, |
зависи- |
||
мость |
n2 f P2 обычно не |
|||
приводится; не приводится также и зависимость M f P2 , так как вращающий момент M
пропорционален P2. Зависимость P1 f P2 имеет характер,
близкий к линейному.
202
Ток двигателя при холостом ходе является практически реактивным. По мере роста нагрузки возрастает активная составляющая тока, в связи с чем зависимость тока Ià от мощности P2 является нелинейной. Кривая f P2 имеет характер, общий для всех
электрических машин. Синхронные двигатели могут работать с cos 1, но обычно их рассчитывают на работу при номинальной нагрузке с опережающим током и cos íîì 0,9–0,8. В этом случае улучшается суммарный cos сети, от которой питаются синхронные двигатели, так как создаваемая ими опережающая реактивная составляющая тока Ià компенсирует отстающую реактивную составляющую тока асинхронных двигателей. Зависимость cos f P2 при работе машин с перевозбуждением
имеет максимум в области P2 Píîì . При снижении P2 величина cos уменьшается, а отдаваемая в сеть реактивная мощность возрастает.
18.3. Ïóñê â õîä
Синхронный двигатель не имеет начального пускового момента. Если его подключить к сети переменного тока, когда ротор неподвижен, а по обмотке возбуждения проходит постоянный ток, то за один период изменения тока в обмотке якоря электромагнитный момент будет изменять свое направление, т. е. средний момент за период будет равен нулю. При этих условиях двигатель не сможет прийти во вращение, так как ротор его, обладающий определенной инерцией, не может быть в течение одного полупериода разогнан до синхронной частоты вращения. Следовательно, для пуска в ход синхронного двигателя необходимо разогнать его ротор с помощью внешнего момента до частоты вращения, близкой к синхронной.
В настоящее время для этой цели применяют метод асинхронного пуска. При этом методе синхронный двигатель пускают в ход как асинхронный, для чего его снабжают специальной короткозамкнутой пусковой обмоткой, выполненной по типу беличьей клетки. Чтобы увеличить сопротивление стержней, клетку изготовляют из латуни. При включении трехфазной обмотки статора в сеть образуется вращающееся магнитное поле,
203
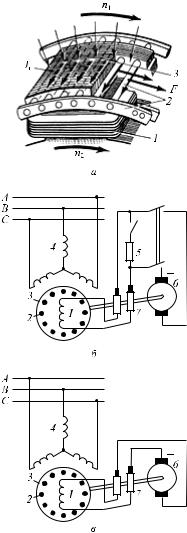
Рис. 18.4. Синхронный двигатель: à — устройство пусковой обмотки; á, â — схемы его асинхронного пуска: 1 — обмотка возбуждения; 2 — пусковая обмотка; 3 — ротор; 4 — обмотка якоря; 5 — гасящее сопротивление; 6 — якорь
возбудителя; 7 — кольца и щетки
которое, взаимодействуя с током Iï в пусковой обмотке (рис. 18.4, à), создает электромагнитные силы F и увлекает за собой ротор. После разгона ротора до частоты вращения, близкой к синхронной, постоянный ток, проходящий по обмотке возбуждения, создает синхронизирующий момент, который втягивает ротор в синхронизм.
Применяют две основные схемы пуска синхронного двигателя. При схеме, изображенной на рис. 18.4, á, â обмотку возбуждения вначале замыкают на гасящий резистор, сопротивление которого Räîá превышает в 8–12 раз активное сопротивление в обмотке возбуждения. После разгона ротора до частоты вращения, близкой к синхронной (при s 0,05), обмотку возбуждения отключают от гасящего резистора и подключают к источнику постоянного тока (возбудителю), вследствие че- го ротор втягивается в синхронизм. Осуществить пуск двигателя с разомкнутой обмоткой возбуждения нельзя, так как во время разгона ротора при s 0 в ней индуктируется вращающимся магнитным полем ЭДС
204
E â 4,44 f 2 wâ m 4,44 f1 swâ m ,
ãäå f 2 f1 s — частота изменения тока в обмотке возбуждения; wâ — число витков обмотки возбуждения;
Ôm — амплитуда магнитного потока вращающегося поля.
В начальный момент пуска при s 1 из-за большого числа витков обмотки возбуждения ЭДС Eâ может достигать весьма большой величины и вызвать пробой изоляции.
При схеме, изображенной на рис. 18.4, â, обмотка возбуждения постоянно подключена к возбудителю, сопротивление которого по сравнению с сопротивлением Râ весьма мало, поэтому эту обмотку
âрежиме асинхронного пуска можно считать замкнутой накоротко. С уменьшением скольжения до s 0,3–0,4 возбудитель возбуждается и в обмотку возбуждения подается постоянный ток, обеспе- чивающий при s 0,05 втягивание ротора в синхронизм.
Различие пусковых схем обусловлено тем, что не во всех слу- чаях может быть применена более простая схема (см. рис. 18.4, â) с постоянно подключенной к возбудителю обмоткой возбуждения, так как она имеет худшие пусковые характеристики, чем более сложная схема (см. рис. 18.4, á). Главной причиной ухудшения пусковых характеристик является возникновение одноосного эффекта, обусловленного влиянием тока, индуктируемого в обмотке возбуждения при пуске, на характеристику пускового момента.
Следует обратить внимание, что выбор сопротивления пус-
ковой клетки r2 , соответствующего значительному пусковому моменту (M ï ), способствует уменьшению момента входа в синхронизм (M âõ ) и, наоборот, при сопротивлении r2 , соответствующем небольшому пусковому моменту (M ï ), момент входа
âсинхронизм увеличивается (M âõ M âõ ) (ðèñ. 18.5).
Достоинства и недостатки.
Синхронные двигатели имеют следующие достоинства:
а) возможность работы при cos 1, что приводит к улуч- шению cos сети, а также к сокращению размеров самого двигателя, так как его ток меньше тока асинхронного двигателя той же мощности. При работе с опережающим током синхронные двигатели служат генераторами реактивной мощности, поступающей в асинхронные двигатели, что снижает потребление этой мощности от генераторов электростанций;
205
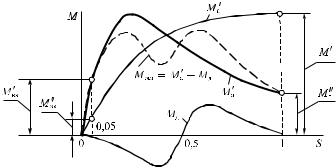
Рис. 18.5. Асинхронные моменты при пуске синхронного двигателя: Mà — основной момент; Mä — дополнительный момент; Mâõ — момент входа в синхронизм
б) меньшая чувствительность к колебаниям напряжения, так как их максимальный момент пропорционален напряжению в первой степени (а не квадрату напряжения, как у асинхронных двигателей);
в) строгое постоянство частоты вращения независимо от механической нагрузки на валу.
Недостатками синхронных двигателей являются: а) сложность конструкции; б) сравнительная сложность пуска в ход;
в) трудности с регулированием частоты вращения, которое возможно только путем изменения частоты питающего напряжения.
Указанные недостатки синхронных двигателей делают их
менее выгодными по сравнению с асинхронными при мощностях до 100 кВт. Однако при более высоких мощностях, когда особенно важно иметь высокий cos и уменьшенные габаритные размеры машины, синхронные двигатели предпочтительнее асинхронных.
ВОПРОСЫ
18.3.1.Чем ограничивается область устойчивой работы синхронного двигателя?
18.3.2.Объясните процесс пуска синхронного двигателя.
18.3.3.Как регулируется коэффициент мощности синхронного двигателя?
206

18.3.4.Каковы достоинства и недостатки синхронных двигателей по сравнению с асинхронными?
18.3.5.В чем заключается отличие двигательного режима синхронной машины от генераторного?
18.3.6.Какой характер имеет реакция якоря в синхронном двигателе при недовозбуждении и перевозбуждении?
18.3.7.Как в синхронном двигателе можно изменять максимальный момент?
18.3.8.Какой режим (перевозбуждения или недовозбуждения) является расчетным и почему?
18.3.9. Назовите способы пуска синхронных двигателей
èдайте их краткую характеристику.
18.3.10.Поясните порядок переключений обмотки возбуждения при асинхронном пуске синхронного двигателя.
18.4. Регулирование частоты вращения двигателя. Вентильный двигатель
Способы регулирования. Частота вращения синхронного
двигателя n2 |
равна частоте вращения n1 |
|
60 f1 |
вращающегося |
|
||||
|
|
|
p |
|
магнитного поля; следовательно, принципиально ее можно регулировать путем изменения частоты питающего напряжения f1 или числа полюсов 2p. Регулировать частоту вращения путем изменения числа полюсов в синхронном двигателе нецелесообразно, так как здесь, в отличие от асинхронного двигателя, требуется изменять число полюсов как на статоре, так и на роторе, что приводит к значительному усложнению конструкции ротора. Поэтому практически используют лишь изменение частоты питающего напряжения.
К синхронному двигателю применимы все основные положения теории частотного регулирования асинхронного двигателя, в том числе необходимость одновременного изменения как частоты, так и питающего напряжения. Однако в чистом виде частотное регулирование частоты вращения синхронных двигателей применяется только при очень малых мощностях.
Для синхронных двигателей, применяемых в электроприводах с большим моментом инерции приводного механизма
207
èтребующих форсированного изменения режима работы (частые пуски, резкие изменения частоты вращения и нагрузки), этот способ регулирования неприменим. Для таких электроприводов наиболее пригодным является метод частотного регулирования с самосинхронизацией, при котором двигатель не может выпасть из синхронизма.
Синхронные двигатели, регулируемые путем изменения частоты с самосинхронизацией, называют вентильными двигателями èëè бесколлекторными двигателями постоянного тока. Однако первое название является более правильным, так как эти двигатели могут получать питание от сети как постоянного, так
èпеременного тока.
При питании вентильного двигателя от сети постоянного тока в преобразователе частоты должны применяться тиристоры с узлами принудительной коммутации. При питании вентильного двигателя от тиристорного преобразователя частоты, основанного на использовании автономного инвертора напряжения (рис. 18.6), преобразователь подключен к источнику постоянного тока и формирует трехфазное напряжение изменяющейся частоты, которое подается на фазы A, B è C обмотки якоря двигателя. К каждой фазе может быть подведено положительное (тиристорами T1, T2 и T3) и отрицательное (тиристорами T4, T5 и T6) напряжение.
Если вначале пропускать ток через фазы A è B (открыты тиристоры T1 и T5), затем — через фазы B è C (открыты тиристоры T2 и T6), далее — через фазы C è A (открыты тиристоры T3 и T4) и т. д. в указанной последовательности, то в машине создается вращающееся магнитное поле. При изменении частоты переключе- ния тиристоров изменяется частота переменного напряжения, подаваемого на фазы обмотки якоря, а следовательно, и частота вращения ротора. Для замыкания реактивной составляющей тока якоря в преобразователе имеются диоды Д1–Д6, включенные параллельно тиристорам, но в обратном направлении.
Коммутация тока в тиристорном преобразователе (переключе- ние тока с одной фазы на другую) требует применения в нем специальных коммутирующих узлов, так как тиристор является не полностью управляемым прибором. Для закрытия тиристора, вклю- ченного в цепь постоянного тока, необходимо кратковременно
208
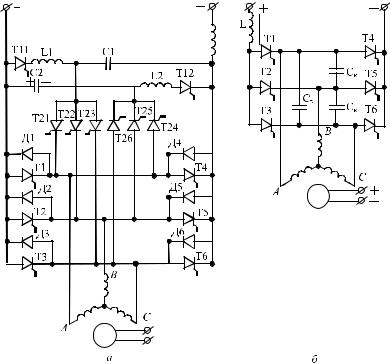
Рис. 18.6. Схемы питания вентильного двигателя от тиристорного преобразова-
теля частоты: à — с инвертором напряжения; á — с инвертором тока
подать на него обратное напряжение определенной величины. В рассматриваемом преобразователе применены два узла принудительной (искусственной) коммутации — по одному для всех тиристоров, присоединяемых соответственно к положительному и отрицательному полюсам источника постоянного тока. Каждый узел состоит из контура L–C и вспомогательных тиристоров.
Закрытие тиристоров T1, T2 и T3, присоединенных к положительному полюсу, производится контуром L1–C1. При открытии вспомогательного тиристора T11 конденсатор C1 заряжается через индуктивность L1 до двойного напряжения сети и запирает тиристор T11. Затем открываются вспомогательные тиристоры T21, T22 или T23 и подают на тиристоры T1, T2 или T3 обратное (положительное) напряжение. При этом соответст-
209
вующий тиристор запирается, а конденсатор C1 разряжается че- рез нагрузку. Аналогично запираются тиристоры T4, T5 и T6. Вначале открывается вспомогательный тиристор T12 и через индуктивность L2 заряжает конденсатор C2. Затем открываются вспомогательные тиристоры T24, T25 или T26 и присоединяются аноды тиристоров T4, T5 или T6 к отрицательной обкладке конденсатора C2.
Напряжение, подаваемое к якорю вентильного двигателя от преобразователя частоты, является, так же как и при частотном регулировании асинхронного двигателя, несинусоидальным. Поэтому, чтобы уменьшить вредные воздействия высших гармоник напряжения, тока и потока, двигатель необходимо снабдить мощной демпферной обмоткой с малыми активными и индуктивными сопротивлениями. В этом случае высшие гармоники оказывают на синхронный двигатель сравнительно небольшое воздействие. При наличии такой обмотки режимы работы вентильного двигателя можно рассматривать с учетом только первых гармоник тока и напряжения.
Режим работы вентильного двигателя зависит не только от величины тока возбуждения и соотношения между напряжением и частотой. Большое значение имеют также моменты подачи напряжения на фазы двигателя и параметры преобразователя частоты.
В преобразователе частоты, основанном на использовании инвертора напряжения (см. рис. 18.6, à), величина выходного напряжения почти не зависит от режима работы двигателя, поэтому регулирование необходимо вести при постоянстве угла . Это можно осуществить, определяя с помощью какого-либо датчика положение оси полюсов ротора (а следовательно, и направление
вектора E 0 ) и регулируя подачу управляющих импульсов на тиристоры преобразователя так, чтобы выходное напряжение преобразователя подавалось на соответствующие фазы двигателя с некоторым углом опережения 0 (угол регулирования) по
отношению к положению вектора E 0 для данной фазы. Можно также определять ось результирующего магнитного потока и подавать питание на соответствующую фазу с требуемым углом 0. Оба эти метода имеют свои преимущества и недостатки, обусловленные в основном особенностями применяемых датчиков и управляющих устройств.
210