

Прикладная теория колебаний
..pdfВысокочастотный вибропогружатель (рис. 7.17, б) включает четырехвальный вибратор 14, приводной электродвигатель 9 с коротким замкнутым ротором, установленный на подпружиненных пригрузочных плитах 15, и наголовник 5. Наличие между электродвигателем и вибратором амортизирующих пружин 13 позволяет существенно уменьшить вредное воздействие вибрации на электродвигатель: в процессе погружения колебания совершают только вибратор и свая 6.
Меняя число пригрузочных плит, а следовательно, и масс пригруза, создающего необходимое давление на погружаемый элемент, подбирают оптимальные режимы вибраций, способствующие наиболее эффективному погружению в соответствующую грунтовую среду элемента заданных параметров. Привод четырехвального вибратора осуществляется через вертикальную цепную передачу 10, конический редуктор 12, горизонтальную цепную передачу 11 и систему синхронизирующих шестерен 3, закрепленных на дебалансных валах с дебалансами 7. Каждый дебаланс вибропогружателя состоит из двух частей, что позволяет регулировать его статический момент изменением взаимного расположения частей. Установка дебалансов в заданном положении осуществляется с помощью подпружиненных фиксаторов. При работе вибропогружатель подвешивается на крюке грузоподъемного устройства с помощью подвески 8.
Вибропогружатели в 2,5…3 раза производительнее паровоздушных и дизельных молотов; они удобны в управлении и не разрушают погружаемые элементы. Основными их недостатками являются непригодность для погружения свай (шпунта) в связные маловлажные грунты и сравнительно небольшой срок службы электродвигателей.
7.6.3. Вибромолоты
Вибромолоты сообщают погружаемым элементам как вибрационные, так и ударные импульсы и обеспечивают эффективное погружение в плотные грунты металлического шпунта дли-
191
Стр. 191 |
ЭБ ПНИПУ (elib.pstu.ru) |
ной до 13 м, металлических свай и труб длиной до 20 м. Конструкции вибромолотов имеют мало различий. Некоторые типы молотов могут работать как в ударном, так и в безударном режимах в зависимости от жесткости упругой системы, параметров вибратора, сопротивления грунта погружению и т.д.
Вибромолоты используют также для погружения железобетонных свай в однородные водонасыщенные грунты и извлечения из грунта труб, свай и шпунта.
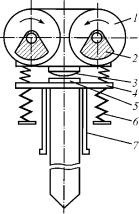
Основными элементами вибромолота (рис. 7.18) являются подпружиненная ударная часть, нижняя пригрузочная плита и наголовник. Ударная часть представляет собой двухвальный бестрансмиссионный вибровозбудитель 1 направленных вертикальных колебаний с ударником 3. В корпусе вибровозбудителя смонтированы два электродвигателя. На их параллельных валах, синхронно вращающихся в различных направлениях, закреплены дебалансы 2 с регулируемым статическим моментом.
Ударная часть и нижняя плита 4 с наковальней 5 соединены между собой рабочими пружинами 6. Наголовник 7 соединяется с нагружаемым элементом жестко или надевается на него свободно без закрепления. При вращении дебалансов ударник 3 колеблющегося вибровозбудителя наносит частые (до 24 Гц) удары по наковальне 5, установленной свободно на нижней плите молота и передающей
удары непосредственно погружае- Рис. 7.18. Принципиальная мому элементу. Режим работы
схема вибромолота
вибромолота (энергию и частоту ударов) регулируют путем изменения зазора между ударником и наковальней, добиваясь в каждом отдельном случае наибольшей производительности машины.
192
Стр. 192 |
ЭБ ПНИПУ (elib.pstu.ru) |
Вибромолоты характеризуются теми же параметрами, что и вибропогружатели, а также энергией и частотой ударов.
Вибромолоты имеют суммарную мощность электродвигателей 14…80 кВт, максимальную вынуждающую силу
112...180 кН, частоту ударов 8...12 Гц.
Энергия удара (Дж)
E = |
mv2 |
, |
|
2(l − R) |
|||
|
|
где m – масса ударной части молота, кг; v – ударная скорость вибромолота, м/с (v ≤ 2 м/с); R – условный коэффициент восстановления скорости при ударе (–1 ≤ R ≤ +1).
Вибропогружатели и вибромолоты работают в комплексе с копром или стреловым самоходным краном соответствующей грузоподъемности.
7.6.4. Шпунтовыдергиватели
Шпунтовыдергиватели предназначены для извлечения из грунта ранее погруженных металлических свай, труб и шпунта длиной 10...20 м. Наибольшее распространение получили шпунтовыдергиватели виброударного действия, работающие по принципу вибромолота. Они оснащаются клиновыми и гидравлическими наголовниками и эксплуатируются совместно со стреловыми самоходными кранами, экскаваторами-кранами и копровыми установками.
Шпунтовыдергиватель (рис. 7.19) состоит из вибровозбудителя 4, виброизолятора 2, подвески 1, рамы 6 с клиновым захватом 7 и пульта дистанционного управления. В корпус вибровозбудителя вмонтированы два электродвигателя, на консолях параллельных валов которых закреплены четыре дебаланса с регулируемым статическим моментом. При синхронном вращении дебалансов в разные стороны создаются вертикально направленные колебания. Вибровозбудитель опирается через
193
Стр. 193 |
ЭБ ПНИПУ (elib.pstu.ru) |
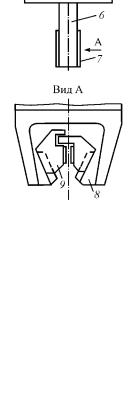
Рис. 7.19. Принципиальная схема шпунтовыдергивателя
витые пружины 5 на раму 6, которая ограничивает его движение сверху, в результате чего вибровозбудитель с бойком 3 наносит удары по раме с наковальней 10 с определенной частотой и энергией. Рама передает энергию удара извлекаемому элементу через клиновой захват, который состоит из двух клиньев 9, скользящих в направляющих 8.
Виброизолятор служит для гашения динамических нагрузок на грузоподъемное устройство, возникающих при работе вибровозбудителя, и состоит из комплекта витых пружин и рычагов. Шпунтовыдергиватели могут эксплуатироваться совместно со стреловыми самоходными кранами грузоподъемностью до 25 т, гусеничными экскаваторами со стреловым оборудованием грузоподъемностью до 20 т и вертикальным телескопическим копровым оборудованием.
Шпунтовыдергиватели имеют суммарную мощность электродвигателей
15...44 кВт, энергиюудара0,74...2,85 кДж,
частоту ударов 8...16 Гц.
Стр. 194 |
ЭБ ПНИПУ (elib.pstu.ru) |
СПИСОК РЕКОМЕНДУЕМОЙ ЛИТЕРАТУРЫ
1.Живейнов Н.Н., Карасев Г.Н., Цвей Л.Ю. Строительная механика и металлоконструкции строительных и дорожных машин. – М.: Машиностроение, 1987. – 278 с.
2.Киселев В.А. Строительная механика. – М.: Стройиз-
дат, 1980. – 616 с.
3.Дарков А.В., Кузнецов В.И. Строительная механика. – М.: Высшая школа, 1962. – 317 с.
4.Бурчаков Ю.И., Гнездин В.Е., Денисов З.М. Строительная механика. – М.: Высшая школа, 1983. – 255 с.
5.Николаенко Н.А., Ульянов С.В. Статистическая динамика машиностроительных конструкций. – М.: Машинострое-
ние, 1977. – 367 с.
6.Стрелков С.П. Введение в теорию колебаний. – М.:
Наука, 1964. – 437 с.
7.Снитко Н.С. Строительная механика. – М.: Высшая школа, 1972. – 487 с.
8.Строительная механика. Динамика и устойчивость сооружений / А.Ф. Смирнов [и др.]; под ред. А.Ф. Смирнова. –
М.: Стройиздат, 1984. – 416 с.
9.Светлицкий В.А., Стасенко И.В. Сборник задач по теории колебаний. – М.: Высшая школа, 1973. – 454 с.
10.Пермяков В.Б. Комплексная механизация строительства: учеб. для вузов. – М.: Высшая школа, 2005. – 383 с.
195
Стр. 195 |
ЭБ ПНИПУ (elib.pstu.ru) |

Решение.
Статический прогиб находим как сумму верхнего δв и нижнего δн прогибов:
δ |
|
= δ |
|
+δ |
|
= 2Q |
+ Q = |
Q |
(c + 2c |
|
); |
ст |
в |
н |
|
2 |
|||||||
|
|
|
c1 |
c2 |
1 |
|
|||||
|
|
|
|
|
|
c1c2 |
|
|
|||
тогда период колебаний (с)
T = 2π |
δ |
ст |
= 2π |
Q(c1 |
+ 2c2 ) |
. |
||
g |
gc c |
2 |
||||||
|
|
|
||||||
|
|
|
|
|
1 |
|
||
Задача № 3. Определить частоту и период колебаний груза Q, расположенного на незакрепленном конце балки
(рис. П.1.2).
Рис. П.1.2. Статическая модель системы
Решение.
Статический прогиб (м)
δ = Ql3
ст 3EJ ,
Круговая частота колебаний (с–1)
ω= |
g |
. |
|
||
|
δст |
|
Период колебаний (с)
T = 2ωπ.
197
Стр. 197 |
ЭБ ПНИПУ (elib.pstu.ru) |
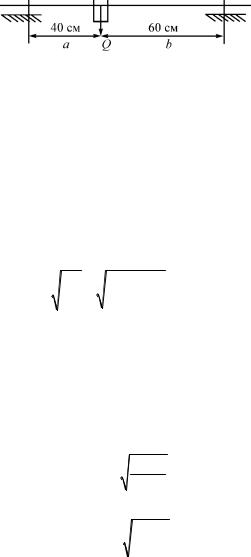
Задача № 4. Определить частоту собственных поперечных колебаний стального вала диаметром d = 50 мм, несущего диск весом Q = 1 кН (рис. П.1.3).
Рис. П.1.3. Динамическая модель вала
Решение.
Статический прогиб
δст |
= |
Qa2b2 |
= |
|
1 0, 42 0,62 64 |
|
|
|
= 3,12 10−4 |
м. |
|
3EJl |
3 |
8 |
3,14 0,05 |
4 |
1 |
||||||
|
|
|
2 10 |
|
|
|
|||||
Круговая частота
ω= |
g |
= |
9,81 |
=177 c−1. |
|
3,12 10−4 |
|||
|
δст |
|
||
Задача № 5. Определить период Т (с) и собственную частоту крутильных колебаний f (Гц) стержня, соединенного с диском весом Q (H). Длина стержня l, диаметр стержня d, диаметр диска D (м).
Решение.
Период
T = 2π G32πlJd 4 ;
тогда частота крутильных колебаний
f = |
1 |
πGd 4 |
, |
|
2π |
32Jl |
|||
|
|
198
Стр. 198 |
ЭБ ПНИПУ (elib.pstu.ru) |
где J – момент инерции массы стержня, кг·м·с, J = QD8g ; G –
модуль сдвига материала стержня; g = 9,8 м/с2.
ПРИЛОЖЕНИЕ 2
Расчет динамических параметров упругомассовой системы при подъеме груза
Скорость механизма к моменту подъема груза увеличивается до величины v и остается постоянной. Влиянием колебания тросов пренебрегаем; Mп и сп – масса и жесткость металлоконструкции крана, приведенные к точке подвеса груза
(рис. П.2.1).
аб
Рис. П.2.1. Механизм крана: а – расчетная схема; б – зависимость нагрузки от времени
До момента отрыва груза
Мп y + cп y = Q tt1 ,
где Q – усилие в конструкции; t1 – время, за которое нагрузка в канате достигает наибольшего значения Q (см. рис. П.2.1).
199
Стр. 199 |
ЭБ ПНИПУ (elib.pstu.ru) |

Запишем с учетом уравнения вынужденных колебаний:
y +ω2 y = |
|
Q |
|
t |
|
|
ω= |
|
|
|
c |
|||||||||
|
|
|
|
|
|
, |
|
|
|
п |
, |
|||||||||
|
M |
п |
t |
|
|
|
М |
|||||||||||||
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
п |
||||
при |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t = 0, y = y |
|
= 0, F = |
Q |
. |
||||||||||||||||
|
||||||||||||||||||||
|
|
|
0 |
|
|
|
|
|
|
|
|
0 |
|
|
|
t1Mп |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Статическое перемещение |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
y |
= Q |
= |
|
|
Q |
|
, |
|
|
|
|
|||||||||
|
М |
|
ω2 |
|
|
|
|
|||||||||||||
|
ст |
|
c |
|
|
|
п |
|
|
|
|
|
|
|||||||
|
|
|
|
|
п |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
тогда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y = |
|
y |
|
|
− |
|
sin ωt |
|||||||||||||
|
|
ст |
t |
|
|
ω |
. |
|||||||||||||
|
t1 |
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||
В момент отрыва груза от опорной поверхности (t = t1): |
||||||||||||||||||||
|
= y |
|
|
− |
sin ωt1 |
|
|
|
||||||||||||
y |
1 |
|
|
, |
||||||||||||||||
|
|
|
||||||||||||||||||
t |
|
|
|
ст |
|
|
|
|
|
ωt1 |
|
|
|
|||||||
1 |
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
= |
yст |
(1−cosωt |
|
|
). |
|
|
||||||||||||
|
|
|
|
|
||||||||||||||||
t |
|
|
|
t1 |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
На втором этапе t ≥ t1, дифференциальное уравнение имеет вид
Мп y +cп y = Q.
Отсюда |
y +ω2 y = |
Q |
и решение при y |
|
= y , |
y |
= y |
|
|
0 |
|||||||
|
|
М |
п |
t |
0 |
t |
||
|
|
|
1 |
|
1 |
|||
|
|
|
|
|
|
|
||
иF0 = Q запишем в форме:
Мп
200
Стр. 200 |
ЭБ ПНИПУ (elib.pstu.ru) |