

Савчук підручник
.pdfРозділ 3. Розв'язування геодезичних задач
Введемо позначення для сталого коефіцієнта заданої геодезичної лінії в підінтегральній функції
k' e'2 cos2 m e'2 (1 sin2 A |
cos2 u |
1 |
) e'2 |
(1 k2 ), (3.90) |
1 |
|
|
|
де k cosu1 sin A1 .
Тоді
|
|
|
|
Q2 |
|
|
|
|
|
|
|
|
|
|
|
s b |
1 k'sin2 (M ) d . |
(3.91) |
|||||||
|
|
|
|
Q1 |
|
|
|
|
|
|
|
|
|
Підінтегральну функцію розкладемо в ряд за формулою |
|||||||||||
бінома Ньютона |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 k'sin2 (M ) |
|
|
|
|
|
|
|
||||
1 |
k' |
sin2 (M ) |
k'2 |
sin4 (M ) |
k'3 |
sin6 (M ) ... |
||||||
|
|
|
||||||||||
2 |
|
|
|
8 |
|
16 |
|
|
|
|||
Поскільки величина k' вміщує ексцентриситет
(e'2 1501 ) – малу величину, то, очевидно, що цей ряд доволі
швидко сходиться .
Замінимо сінуси парних степенів через косінуси кратних дуг, на основі співвідношень:
sin2 |
(M ) 1 1cos2(M ) |
|
|
|
|
|
|
|
||||||||
|
|
2 |
|
|
2 |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
sin4 |
(M ) |
3 |
|
1 |
cos2(M ) |
1 |
cos4(M ) |
|
|
,(3.92) |
||||||
|
|
|
|
|
||||||||||||
|
|
8 |
|
|
2 |
|
8 |
|
|
|
|
|
||||
6 |
|
5 |
|
|
|
15 |
|
|
|
3 |
|
1 |
|
|
||
sin(M ) |
|
|
|
|
|
|
cos2(M ) |
|
cos4(M ) |
|
cos6(M ) |
|||||
|
|
|
|
|
|
|
||||||||||
|
|
16 |
|
|
32 |
|
|
16 |
32 |
|
||||||
Згрупуємо коефіцієнти при кожній функції з одинаковим аргументом і введемо позначення
142
|
Розділ 3. Розв'язування геодезичних задач |
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
3 |
|
|
|
|
2 |
|
|
|
|
|
5 |
|
3 |
|
|
|||
|
A |
1 |
|
|
|
k' |
|
|
|
|
k' |
|
|
|
|
|
|
k' |
|
... |
|
|||||||||||
|
4 |
|
64 |
|
|
256 |
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
1 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
15 |
|
|
|
|
|
|
||||||
|
B |
|
k' |
|
|
|
|
k'2 |
|
|
|
k'3 |
... |
|
|
|||||||||||||||||
|
4 |
16 |
|
512 |
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(3.93) |
||||||||||||||
|
|
1 |
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
. |
|||||||
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
||||||||
|
C |
|
|
k' |
|
|
|
k' |
|
... |
|
|
|
|
||||||||||||||||||
|
128 |
|
512 |
|
|
|
|
|||||||||||||||||||||||||
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
D 1536 k' |
|
|
... |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
Тепер вираз (3.91) запишемо в вигляді |
|
|
|
|
|
|||||||||||||||||||||||||||
|
A Bcos2(M ) 2Ccos4(M ) 3Dcos6(M ) ... d .(3.94) |
|||||||||||||||||||||||||||||||
s b |
||||||||||||||||||||||||||||||||
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Зауважимо, що величина M , яка визначається за формулою (3.87), для даної геодезичної лінії величина стала; інтеграли тригонометричних функцій в рівності (3.94) обчислюються так:
|
|
1 |
sin2(M ) Bsin cos(2M ), |
||
B cos2(M )d B |
2 |
||||
0 |
0 |
|
|
|
|
|
|
1 |
sin4(M ) Csin2 cos(4M 2 ), |
(3.95) |
|
2C cos4(M )d 2C |
4 |
||||
0 |
0 |
|
|
|
|
|
|
|
1 |
sin6(M ) Dsin3 cos(6M 3 ). |
|
3D cos6(M )d 3D |
6 |
||||
0 |
|
0 |
|
|
|
|
В результаті інтегрування (3.94) отримаємо вираз для s |
||||
в функції дуги |
|
|
|
|
|
|
A Bsin cos(2M ) Csin2 cos(4M 2 ) |
||||
|
s b |
|
|
|
. |
|
Dsin3 cos(6M 3 ) ... |
|
|||
|
|
|
|
|
(3.96) |
143

Розділ 3. Розв'язування геодезичних задач
Ця формула застосовується при розв’язуванні оберненої геодезичної задачі. При розв’язуванні прямої геодезичної задачі величина sвідома, треба визначити . Розв’язуючи (3.96) щодо, знайдемо
|
|
s |
|
|
|
|
|
1 |
|
|
Bsin cos(2M ) Csin2 cos(4M 2 ) |
(3.97) |
|
|
||||||
|
b |
|
|
|||
|
|
|||||
|
A |
Dsin3 cos(6M 3 ) ... |
|
|
||
|
|
|
|
|
||
За формулою (3.97) сферична відстань визначається послідовними наближеннями. В першому наближенні можна прийняти
1 |
|
|
s |
|
, |
|
|
|
|
||||
|
|
|
||||
Aa |
1 e2 |
|||||
|
|
|
|
після чого (3.97) запишеться в вигляді
1 A i Bsin i cos(2M i ) Csin2 i i 1 Dsin3 i cos(6M 3 i ) ...A
,
де i 1,2,...,n - номер наближення.
cos(4M 2 i )
Наведені формули забезпечують точність обчислень 1 10-4 м в віддалі s і 1 10-4 секунди в при будь-яких віддалях на земному еліпсоїді.
Перейдемо до обчислення інтегралу (3.85). Перед інтегруванням необхідно так перетворити підінтегральний вираз, щоб аргумент підінтегральної функції і змінна інтегрування були би одною і тією величиною.
Попередньо розкладемо підінтегральну функцію в ряд за формулою бінома Ньютона і проінтегруємо перший член отриманого ряду
144

Розділ 3. Розв'язування геодезичних задач
Q2 |
2 2 1/2 |
Q2 e2 |
|
e4 |
2 |
e6 |
4 |
|
2 |
|
l (1 e cos u) |
d |
|
|
cos u |
|
cos u ... cos ud (3.98) |
||||
Q1 |
|
Q1 |
2 |
|
8 |
|
16 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В підінтегральному виразі перейдемо від змінних u і до змінної . Згідно першого з рівнянь (3.76)
d cosu d sin A,
а згідно (3.86), для поточної точки дуги великого кола Q1'Q3'
cosu sinsinmA .
Перемноживши останні вирази, отримуємо
cos2 ud sinmd . |
(3.99) |
Зврахуванням (3.89) і (3.99) рівність (3.98) представимо
ввигляді
|
e2 |
|
|
e4 |
|
|
e6 |
|
e4 |
|
e6 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
... |
|
|
|
|
... |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
2 |
|
|
8 |
|
16 |
|
|
8 |
|
8 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l sinm |
|
|
|
2 |
msin |
2 |
(M ) |
|
|
|
|
d |
||||||
cos |
|
|
|
|
|
|
|
|||||||||||
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
e |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
... cos4msin4 (M ) |
... |
|
|
||||||||||
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
16 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Як і в попередньому, степеневі функції змінної замінимо функціями кратних аргументів на основі співвідношень (3.92) і згрупуємо сталі коефіцієнти при кожній функції з одинаковими аргументами. Отримаємо
145
|
|
|
|
|
|
|
Розділ 3. Розв'язування геодезичних задач |
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
e |
2 |
|
e |
4 |
|
e |
6 |
|
|
|
|
|
4 |
|
|
|
e |
6 |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
... |
e |
|
|
|
|
|
... cos2 |
m |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
2 |
|
|
8 16 |
|
|
|
|
8 |
|
|
8 |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
l sin m |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
0 |
|
|
|
3e6 |
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
... cos |
|
m ... |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
128 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
e |
4 |
|
|
e |
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
e |
6 |
|
|
|
|
|
|
|
|||
|
|
|
|
|
... cos2 mcos2(M |
) |
|
... cos4 |
mcos2(M ) |
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
16 |
|
16 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
32 |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
e6 |
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
... cos |
|
mcos4(M ) ... |
|
|
|
d |
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
128 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
Введемо позначення |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
sinm cosu1 sin A1 |
k; |
|
|
|
|
|||||||||||||||
A' |
1 |
e2 |
|
|
1 |
e4 |
|
1 |
|
e6 |
1 |
|
e4 |
|
|
1 |
|
e6 (1 k2) |
3 |
|
e6(1 k2 )2, |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
2 |
|
|
|
|
8 |
|
|
|
|
16 |
|
16 |
|
|
16 |
|
|
|
|
|
128 |
|
||||||||||||||
|
1 |
|
|
4 |
|
|
1 |
|
|
6 |
|
2 |
|
|
|
1 |
|
|
|
|
|
|
2 |
|
2 |
|
|
|
|
|
|
||||||
B' |
|
|
|
e |
|
|
|
|
|
e |
|
(1 k |
|
) |
|
(1 |
k |
|
) |
|
, |
|
|
|
|
(3.100) |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
16 |
|
|
|
|
|
16 |
|
|
|
|
|
|
|
|
32 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
C' |
1 |
|
|
e6 |
(1 k2)2, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
256 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
після чого
l k A' B'cos2(M ) 2C'cos4(M ) ... d . (3.101)
0
В результаті інтегрування (3.101) з врахуванням зауважень (3.95), отримуємо
l k A'` B'sin cos(2M ) C'sin2 cos(4M 2 ) ..., (3.102)
Формулою (3.102) забезпечується точність обчислення різниці довгот в 0.0001" при будь-яких віддалях.
146
Розділ 3. Розв'язування геодезичних задач
При розв’язуванні оберненої геодезичної задачі для обчислення , коли задана різниця довгот l L2 L1 , виникає
необхідність застосування методу наближень, оскільки інші величини у формулі (3.102) залежать від шуканої величини .
Отже, нами отримані всі співвідношення, які необхідні для взаємного переходу з еліпсоїда на сферу при роз’язуванні головних геодезичних задач. Вкажемо також, що при розв’язуванні цих задач використовуються також формули сферичної тригонометрії для розв’язування прямої і оберненої геодезичних задач на сфері (див. п. 3.4.2.а).
3.6.4. Чисельні методи розв'язування головних геодезичних задач.
Аналітичні методи обчислень не згубили свого значення і в теперішній час, проте область їх застосування змінилась в зв'язку з широким використанням ЕОМ в різних галузях, в тому числі і в геодезичній практиці. Якщо майже єдиною базою для наближених представлень складних функцій, з котрою виходила геодезія, особливо сфероїдна її частина, був розклад функцій в ряди Тейлора, то тепер на перший план вийшли різноманітні чисельні способи розв'язування диференційних рівнянь і обчислення еліптичних інтегралів. Відомо, що еліптичні інтеграли і походжені від них еліптичні функції в диференційних рівняннях, котрі мають квадратні корені із многочленів вищих степенів, є основним математичним апаратом поверхні еліпсоїда.
Чисельні методи, що використовуються при розв’язуванні головних геодезичних задач, можна розділити на дві групи:
а) обчислення еліптичних інтегралів (3.29) методами чисельного інтегрування; б) чисельне інтегрування диференційних рівнянь (3.27) і (3.28).
Відзначимо, що обчислення еліптичних інтегралів методами чисельного інтегрування (формули трапецій, Сімпсона, Чебишева, Гаусса, Грегорі тощо) не є оптимальним розв'язком головних геодезичних задач. Справа в тому, що
147
Розділ 3. Розв'язування геодезичних задач
квадратурні формули, наприклад, Гаусса хоча і вимагають досить мало машинної пам’яті, проте у практичному застосуванні приводять до ускладнення програм. В період малопотужних ЕОМ дані методи мали певне практичне застосування.
Вданий час оптимальним методом в розумінні точності
іефективності розв'язування головних геодезичних задач, як вже було підкреслено в п.3.4.2.б є метод чисельного інтегрування диференційних рівнянь, названий на честь авторів методом Рунге-Кутта. Відомі також його модифікації: Рунге-Кутта- Інгланда, Рунге-Кутта - Мерсона.
Характерні риси даного методу:
простота програмування ( декілька десятків операторів для будь-якої мови програмування);
висока точність розв'язування на відстані до 20 тис.км;
універсальність і однотипність обчислювальної процедури при будь-яких відстанях;
можливість оцінки точності інтегрувння на одному кроці. Практично єдиний недолік даного методу - наявність
порівняно потужної ЕОМ - на даний час не є принциповим.
У першому розділі розглянуто в загальних рисах метод Рунге-Кутта 4-го порядку для розв'язування диференційних рівнянь. Тут ми зупинимось на застосуванні цього методу для розв’язування головних геодезичних задач на поверхні еліпсоїда.
Розв'язування прямої геодезичної задачі методом Рунге-Кутта 4- го порядку
Запишемо вихідну систему диференційних рівнянь
(3.27) і (3.28) у вигляді
dB |
f |
(B,A), |
|
ds |
1 |
|
|
dL |
f |
(B,A), |
(3.103) |
ds |
2 |
|
|
dA |
f |
(B,A). |
|
ds |
3 |
|
|
148
Розділ 3. Розв'язування геодезичних задач
При розв'язуванні прямої геодезичної задачі виникає задача Коші з початковими умовами:
B |
S 0 B1; |
L |
S 0 L1; |
A |
S 0 A1 , |
а формули Рунге-Кутта 4-го порядку для даної задачі, враховуючи (1.14) та (1.13), будуть мати вигляд:
Bi 1
Li 1
Ai 1
k1( j)
k2( j)
k3( j)
k4( j)
B |
|
|
1 |
|
(k (1) |
2k |
|
(1) |
2k |
|
(1) |
k |
|
(1) |
), |
|||||||||||||
6 |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
i |
|
|
|
1 |
|
|
|
|
|
2 |
|
|
|
|
|
3 |
|
|
|
4 |
|
|
||||||
L |
|
|
1 |
|
(k (2) |
2k |
|
|
(2) |
2k |
|
(2) |
k |
(2) ), |
||||||||||||||
6 |
|
|
|
|
|
|
|
|
||||||||||||||||||||
i |
|
|
|
1 |
|
|
|
|
|
2 |
|
|
|
|
|
3 |
|
|
|
4 |
|
|
||||||
A |
|
|
1 |
(k (3) |
2k |
|
(3) |
2k |
(3) |
k |
(3) |
), |
||||||||||||||||
6 |
|
|
|
|
|
|
|
|||||||||||||||||||||
i |
|
|
1 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
3 |
|
|
|
4 |
|
|
|||||
hi |
fi |
(Bi , Ai ); |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(3.104) |
||||||||
h f |
i |
(B |
k1(1) |
|
, A |
|
k1(3) |
|
); |
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
i |
|
|
|
|
|
i |
2 |
|
|
|
|
i |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
h f |
i |
(B |
k2(1) |
|
, A |
k2(3) |
); |
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||||||
i |
|
|
|
|
|
i |
2 |
|
|
|
|
i |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
h f |
i |
(B k |
(1) |
, A |
k |
(3) |
). |
|
|
|
|
|
||||||||||||||||
i |
|
|
|
|
|
i |
3 |
|
|
|
i |
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|||
де h - крок інтегрування ; i - 0,1,3, . . ., m-1 ; j - 1,2,3; m -
кількість частин, на які ділиться весь відрізок інтегрування [0, s].
Якщо величина кроку інтегрування, що дає результати
необхідної точності наперед невідома, |
то |
інтегрування |
виконується декілька раз, зменшуючи кожен раз |
крок вдвоє. |
|
Дана процедура повторюється до тих пір, поки результати повторного інтегрування відрізняються від попереднього на недопустиму величину.
Точність чисельного розв'язування прямої геодезичної
задачі характеризується |
похибками кінцевих |
результатів |
|
інтегрування. |
Ці похибки одержуються в |
результаті |
|
накопичення похибок окремих кроків інтегрування. |
|
||
149
Розділ 3. Розв'язування геодезичних задач |
|
Для визначення похибок B", L", A" і-го |
кроку |
звернемось до формул (3.104). Ці формули тотожні розкладам широти, довготи і азимута в ряди Тейлора до членів, що мають похідні четвертого порядку.
Так, для широти, це буде
|
|
dB |
d2B |
h2 |
d3B |
h3 |
d4B |
h4 |
|
||||||||
B |
B |
|
h |
|
|
|
|
|
|
|
|
|
|
. |
|||
dh2 |
2! |
dh3 |
3! |
dh4 |
|||||||||||||
i 1 |
i |
dh |
|
|
|
|
|
|
4! |
|
|||||||
|
|
|
1 |
|
|
1 |
|
|
|
i |
|
|
|
i |
|
|
|
Тому похибка інтегрування |
|
|
|
на |
і-му кроці рівна членам |
||||||||
п'ятого порядку: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
h5 |
d5B |
|
|||||||
B |
|
i |
|
|
|
|
|
, |
|
||||
|
|
|
5 |
|
|
||||||||
i 1 |
|
|
|
5! |
|
dh |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
h5 |
d5L |
|
|||||||
L |
|
|
|
i |
|
|
|
|
|
|
, |
(3.105) |
|
|
|
|
|
|
|
5 |
|||||||
i 1 |
|
|
|
5! |
|
|
|
|
|||||
|
|
|
|
dh |
|
|
|
|
|||||
|
|
|
|
h5 |
d5A |
|
|||||||
A |
|
|
i |
|
|
|
|
|
|
. |
|
||
|
|
|
|
5 |
|
|
|||||||
i 1 |
|
|
|
5! |
|
dh |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
||||
Підставивши значення похідних пятого порядку (3.34), (3.35), (3.36) отримаємо:
B |
|
h5 |
sin4 |
Ai |
cosAi (1 30ti |
2 45ti |
4 ) |
|
|
|
|
|
||||||||||||||
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
||||
120R5 |
|
A cos3 |
A(8 60t 2 60t |
|
|
|
|
|
|
|||||||||||||||||
1 |
|
sin2 |
i |
4) |
|
|
|
|
||||||||||||||||||
|
|
|
|
|
/ |
|
|
i |
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
cos4 |
A sin A(2 15t 2 |
15t |
4) |
|
|||||||||||||||||
|
|
8h5 |
|
|
|
|
i |
|
|
|
i |
|
|
i |
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
4 |
|||||
L |
|
|
i |
|
sin3 |
A cos2 A(1 |
20t |
|
|
|
30t |
|
|
) , |
||||||||||||
|
|
|
|
|
|
|
||||||||||||||||||||
1 |
|
120R5 |
cosBi |
sin5 |
|
/ |
|
|
|
|
i |
|
|
|
i |
|
|
|
|
|
i |
|
|
|||
|
|
|
|
|
|
A(t 2 |
3t 4) |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
i i |
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
cos4 A sin A(61t |
i |
180t 3 |
120t 5) |
|
|
|
|||||||||||||||||
|
|
h5 |
|
|
|
i |
|
i |
|
|
|
|
i |
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
5 |
|
||||
A |
|
i |
sin3 A cos2 |
A(58t |
|
280t |
|
|
|
240t |
|
|
) , |
|||||||||||||
120R5 |
|
|
|
|
|
|||||||||||||||||||||
1 |
|
|
sin5 |
/ |
|
|
i |
|
|
|
i |
|
|
i |
|
|
|
|
|
|
i |
|
|
|
||
|
|
|
|
A(t |
20t 3 |
24t 5) |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
i i |
|
|
|
i |
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
ti tgBi.
150
Розділ 3. Розв'язування геодезичних задач
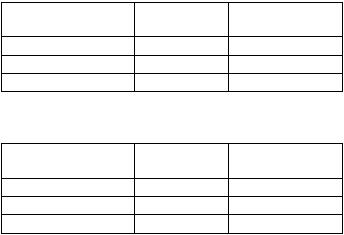
Приклад. а) при R=6380 км, B=450 , A=450 для різних відстаней (кроків інтегрування) отримаємо
Значення |
h=50 км |
h=100 км |
величин |
|
|
B" |
-8 10-8 |
-2 10-6 |
L" |
-2 10-7 |
-8 10-6 |
A" |
-3 10-7 |
-8 10-6 |
б) при R=6380 км, B=750 , A=450
Значення |
h=50 км |
h=100 км |
величин |
|
|
B" |
-5 10-6 |
-2 10-4 |
L" |
-1 10-4 |
-4 10-3 |
A" |
-2 10-4 |
-7 10-3 |
Отже, чисельний метод розв'язування прямої геодезичної задачі можна застосовувати практично на будь-яку відстань, за винятком тих випадків, коли геодезична лінія розташовується біля полюса, оскільки tgB прямує до нескінченності. В цьому випадку ефективним може виявитись процедура зменшення кроку інтегрування. Так, із зменшенням кроку інтегрування вдвоє, точність інтегрування збільшується в 25. Проте в результаті заокруглень на кожному кроці може проходити поступове накопичення похибок із збільшенням числа кроків. Практичні розрахунки на комп’ютері показують, що при подвійній точності обчислень (16 значущих цифр) цей фактор суттєво не впливає на точність визначення координат і азимута напряму.
Розв'язування оберненої геодезичної задачі із застосуванням методу Рунге-Кутта 4-го порядку
При розв’язуванні оберненої геодезичної задачі практично в будь-яких відомих способах за основу приймається алгоритм розв'язування прямої геодезичної задачі.
151