

Учебное пособие 800130
.pdfФедеральное государственное бюджетное образовательное учреждение высшего образования
«Воронежский государственный технический университет»
Кафедра строительной техники и инженерной механики имени доктора технических наук, профессора Н.А. Ульянова
169-2017
Подъемник лифтовый
Методические указания
к выполнению виртуальной лабораторной работы для студентов всех форм обучения направлений подготовки
23.03.02"Наземные транспортно-технологические комплексы",
23.03.03"Эксплуатация транспортно-технологических машин и комплексов", специальности 23.05.01 "Наземные транспортно-технологические средства"
Воронеж 2017
УДК 621.86 ББК 38.6 – 44я7
Составители: Калинин Ю.И., Иванищев П.И., Ульянов А.В.
Подъемник лифтовый : методические указания к выполнению виртуальной лабораторной работы для студентов всех форм обучения направлений подготовки 23.03.02 "Наземные транспортно-технологические комплексы", 23.03.03. "Эксплуатация транспортно-технологических машин и комплексов", специальности 23.05.01 "Наземные транспортно-технологические средства" / ВГТУ; сост.: Ю.И. Калинин, П.И.Иванищев, А.В. Ульянов. – Воронеж, 2017. –
10 с.
Виртуальные лабораторные работы по дисциплинам "Грузоподъемные машины", "Подъемно-транспортные машины и оборудование", "Конструкция грузоподъемных машин и оборудование" разработаны для дистанционного изучения названных дисциплин.
Предназначены для студентов всех форм обучения по направлениям подготовки 23.03.02. "Наземные транспортно-технологические комплексы", 23.03.03. "Эксплуатация транспортно-технологических машин и комплексов" и специальности 23.05.01 "Наземные транспортно-технологические средства".
Издание подготовлено в электронном виде и содержится в файле «МУ Подъемник лифтовый.pdf».
Ил. 7. Табл. 2. Библиогр.: 4 назв.
УДК 621.86 ББК 38.6 – 44я7
Издается по решению учебно-методического совета ВГТУ
Рецензент – А.А. Кононов, д-р техн. наук, профессор кафедры информатики и графики ВГТУ
© ФГБОУ ВО «Воронежский государственный технический университет», 2017
Лабораторная работа
Подъемник лифтовый
Цель работы.
Познакомится с принципиальной конструктивной схемой лифтового подъемника, уяснить принцип действия и условия функционирования подъемника при действии различных комбинаций нагрузочных факторов.
1.Общий порядок выполнения лабораторной работы
1.1.По литературе [1–4] изучить устройство лифтовых подъемников, познакомиться с конструкцией узлов подъемников, уяснить порядок определения нагрузок, действующих при движении кабины лифта, и условия надежной и безопасной работы лифта. Познакомиться с лабораторной моделью лифтового подъемника (рис.1), порядком определения условий, обеспечивающих надежное функционирование лифтового подъемника, ответить на контрольные вопросы.
1.2.Познакомиться с виртуальной моделью лифтового подъемника и способом ее управления.
1.3.Выполнить действия, указанные в п. 3 настоящих методических указа-
ний.
1.4.Отчет по лабораторной работе представляют в печатном виде. Он должен содержать название работы, ФИО исполнителя, учебную группу и вариант задания. В отчете помещают формулировку контрольных вопросов и ответы на них, схему лабораторной установки, таблицу 2 с результатами расчетов, протокол проведенных испытаний на виртуальной модели лифта, анализ полученных результатов и выводы по работе. Титульный лист отчета выполняют по форме титульного листа настоящих методических указаний с приведением адресных данных исполнителя, указанных выше.
Литература:
1. Архангельский Г.Г., Волков Д.П. и др. Лифты: учебник – М.: Издательство Ассоциации строительных вузов, 1999. – 480 с.
2. Вайнсон А.А. Подъемно-транспортные машины: учебник – М.: Машиностроение, 1989. – 536 с.
3. Калинин Ю.И, Ульянов А.В. Грузоподъемные машины: лабораторный практикум. Воронежский ГАСУ – Воронеж, 2012. - 192 с.
4. Федеральные нормы и правила безопасности опасных производственных объектов, на которых используются подъемные сооружения: нормативный документ – www.gosnadzor. ru, 2014. – 148 c.

2. Краткие теоретические сведения
Лифтом называют стационарную грузоподъемную машину периодического действия, предназначенную для подъема людей или грузов в закрытой кабине, движущейся по жестким прямолинейным направляющим с углом наклона к вертикали не более 15 градусов.
По назначению лифты подразделяются: на пассажирские, грузовые, грузопассажирские, больничные, специальные.
По типу привода: с электродвигателями постоянного и переменного тока, с гидродвигателями вращательного и поступательного типа.
По конструкции механизма передачи движения кабине: канатные, цепные,
реечные, винтовые.
По виду рабочего органа приводного механизма: с канатным барабаном, с канатоведущим шкивом, с цепной звездочкой, с кремальерной парой, с винтовой парой, с телескопическим гидроцилиндром.
По способу воздействия на кабину: с верхней подвеской кабины, с нижней подвеской кабины (выжимные).
По скорости движения кабины: тихоходные – до 1 м/с, быстроходные – 1,4 – 2 м/с; скоростные > 2 м/с.
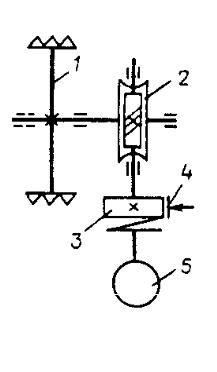
Наибольшее распространение при оборудовании многоэтажных гражданских зданий получили лифты с электрическим приводом канатоведущего шкива и верхней подвеской кабины. Кинематическая схема такого лифта показана на рис. 1.
Рис. 1. Кинематические схемы лифтов с канатоведущим шкивом
иверхней подвеской кабины: а – с малой площадью пола кабины;
б– с большей площадью пола кабины
Общее устройство типовой конструкции лифта показано на рис. 2. Рабочие элементы лифта монтируют в жестком каркасе (шахте) 1, которая
может быть элементом конструкции здания. Верхнюю часть шахты завершает помещение 2, называемое машинным, в котором установлена лифтовая лебедка 3, станция управления 4. Нижняя часть шахты образует приямок 5, в котором установлены буфера кабины 6 и буфера противовеса 7. Внутри шахты перемещается кабина 8 по направляющим 9.
2

Рис. 2. Общий вид пассажирского лифта
3
|
Направляющие 10 служат для ориентирования |
|
|
противовеса 11 при перемещении его в шахте. |
|
|
Подвод электроэнергии к движущейся кабине осу- |
|
|
ществляется через гибкий подвесной кабель 12. |
|
|
Безопасность перемещения людей в кабине обес- |
|
|
печивается устройствами безопасности: ограничи- |
|
|
телем грузоподъемности, ограничителем скорости |
|
|
перемещения кабины, ловителями кабины, ловите- |
|
|
лями противовеса, контактами контроля закрытия |
|
|
дверей кабины 13, дверей шахты 14. Кинематиче- |
|
|
ская схема лифтовой лебедки с канатоведущим |
|
|
шкивом показана на рис. 3. |
|
|
Канатоведущий шкив 1 размещен на валу чер- |
|
|
вячного колеса редуктора 2. Вал червяка через |
|
|
муфту 3 с тормозным шкив 4 приводится во вра- |
|
Рис. 3. Кинематическая |
||
щение электродвигателем 5. Движение кабины и |
||
схема лифтовой |
противовеса в лифтах, оборудованных лебедками с |
|
лебедки |
КВШ, осуществляется за счет фрикционных сил |
|
|
сцепления, возникающих между тяговыми каната- |
|
|
ми и канавками шкива. Натяжение канатов подвески кабины и противовеса в процессе работы лифта непрерывно изменяется под влиянием изменения положения кабины по высоте и под действием сил инерции в неустановившихся режимах движения кабины. Для нормального функционирования лифта должна быть гарантирована работа лифта без проскальзывания каната по шкиву. Связь натяжений набегающей Sн и сбегающей Sс ветвей каната при взаимодействии каната со шкивом выражается формулой Эйлера:
Sн = Sс·efα ,
где е – основание натурального логарифма;
f – коэффициент трения между канатом и ободом шкива; α – угол охвата канатом шкива в радианах.
Возможность передачи тягового усилия канатом без проскальзывания каната по шкиву характеризуют величиной тяговой способности КВШ
γ = efα = S2/S1.
Для исключения проскальзывания каната необходимо иметь некоторый запас тяговой способности такой величины, чтобы в наиболее неблагоприятной ситуации нагружения канатов величина коэффициента тяговой способности несколько превышала предельную величину. Величина коэффициента запаса тяговой способности КВШ определяется соотношением
nγ = γ/γмакс,
где γмакс – наибольшая величина коэффициента запаса в эксплуатационных и испытательных режимах;
4
γ – величина коэффициента тяговой способности при расчетных значениях угла охвата α и коэффициента трения f.
Величина коэффициента запаса тяговой способности имеет узкие пределы nγ = 1,08 ÷1,2.
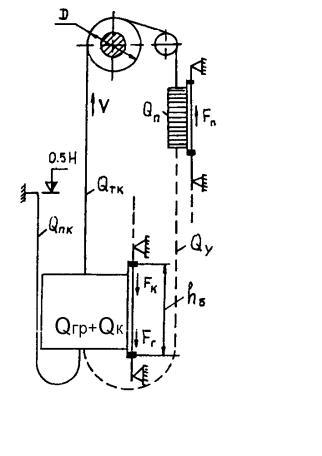
При перемещении кабины набегающее и сбегающее усилия в подъемном канате непрерывно изменяется. Это связано изменением полезной нагрузки в кабине на этажных площадках, изменением силы тяжести подъемных и уравновешивающих канатов, изменением сил трения башмаков кабины по направляющим при изменении положения грузов кабине. Расчетная схема лифта с обозначением действующих усилий при перемещении кабины показана на рис. 4. Обозначенные на схеме усилия необходимо учитывать при определении набегающего и сбегающего усилий, действующих при взаимодействии подъемного каната с канатоведущим шкивом.
Рис. 4. Схема определения усилий в тяговых канатах лифта
Коэффициент запаса тяговой способности в указанных пределах должен обеспечиваться при следующих ситациях:
-подъем (спуск) груженой кабины внизу;
-подъем (спуск) груженой кабиной вверху;
-подъем (спуск) порожней кабины внизу;
-подъем (спуск) порожней кабиной вверху;
-подъем перегруженной на 10 % кабины внизу;
-подъем перегруженной на 10 % кабины вверху.
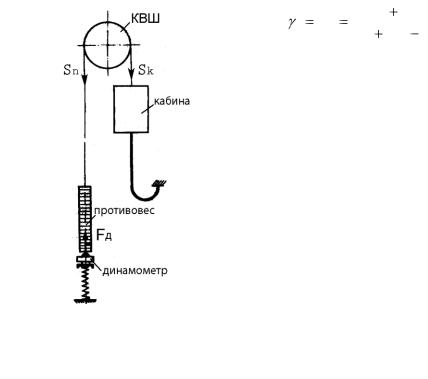
Оценка эффективности работы канатоведущего шкива во время ежегодного технического освидетельствования лифта заключается в определении коэффициента тяговой способности канатоведущего шкива в соответствии с методикой АО МОСЛИФТ. Она осуществляется следующим образом. На буфер противовеса устанавливается динамометр сжатия, кабина в ручном режиме поднимается вверх до тех пор, пока противовес не опустится на динамометр. В момент начала проскальзывания грузового каната по шкиву фиксируются показания динамометра. Схема статических испытаний лифта показана на рис. 5. Экспериментальная величина коэффициента тяговой способности γэ подсчитывается по формуле
5
|
|
Sk |
|
Gk |
Gnk |
, |
|
|
э |
Sn |
|
Gn |
Gтк Fd |
||
|
|
|
|||||
|
|
|
|
||||
|
где Sk и Sп – силы натяжения канатов подвески и |
||||||
|
противовеса; |
|
|
|
|
|
|
|
Gк,Gп,Gпк,Gтк,Fd – силы тяжести кабины, противо- |
||||||
|
веса, подвесного кабеля, тяговых канатов, сила по по- |
||||||
|
казаниям динамометра, соответственно. |
||||||
|
Контрольные вопросы |
|
|||||
|
1. В чем состоит принципиальное отличие лифто- |
||||||
|
вого подъемника от других типов подъемников? |
||||||
|
2. Какие виды приводных механизмов использу- |
||||||
|
ются для перемещения кабины лифта? |
||||||
|
3. Из каких основных элементов состоит лифто- |
||||||
Рис. 5. Схема стати- |
|||||||
вый подъемник? |
|
|
|
|
|||
ческих испытаний |
|
|
|
|
|||
4. Какова должна быть оптимальная масса проти- |
|||||||
лифта |
|||||||
вовеса в лифтовом подъемнике? |
|||||||
|
|||||||
|
5. Что понимают под коэффициентом тяговой |
||||||
способности канатоведущего шкива? |
|
|
|
|
|
||
6. Что понимают под коэффициентом запаса тяговой способности канатоведущего шкива и какова его рекомендуемая величина?
7. Какие устройства должны обеспечивать безопасность работы лифта?
8. При каких условиях вступают в действие устройства, названные в ответе на вопрос № 7?
9. При каких условиях назначается минимальная величина коэффициента запаса прочности подъемных канатов лифта?
10. Как часто необходимо проводить техническое освидетельствование лифта?
3. Лабораторный макет лифтового подъемника
3.1 Лабораторный стенд «Подъемник лифтовый»
Лабораторный стенд «Подъемник лифтовый» (рис. 6) предназначен для изучения принципа работы лифта, имеющего грузоподъемный механизм с канатоведущим шкивом.
Лифтовый подъемник состоит из металлического каркаса (шахты), установленной на основании. Верхняя часть шахты имеет площадку, на которой смонтирован грузоподъемный механизм (лебедка). Лебедка состоит электродвигателя, двухступенчатого червячно-цилиндрического редуктора. На выходном валу редуктора установлен канатоведущий шкив. Канат охватывает шкив на дуге 180°. Концы каната проходят через отверстия в площадке и закреплены одним концом на кабине, другим – на противовесе. Длина каната обеспечивает
6

ход кабины и противовеса на всю высоту шахты. Внутри шахты на двух противоположных стенках закреплены направляющие элементы.
Рис. 6. Лабораторный макет лифтового подъемника
Одна пара направляющих служит для ориентации в шахте кабины, другая пара - для ориентации противовеса. Внутри шахты на основании (в приямке) установлены буфер для кабины и буфер для противовеса. Усилие опирания противовеса на буфер можно контролировать динамометрическим устройством. Управление лифтовой лебедкой осуществляется кнопочным выключателем и выключателями безопасности.
7
3.2. Виртуальная модель лифтового подъемника
Виртуальная модель лифтового подъемника состоит из трехмерной интерактивной модели лифта. Модель полностью соответствует реальному лабораторному макету лифта. Модель состоит шахты, грузоподъемного механизма с канатоведущим шкивом, кабины, движущейся по жестким направляющим, противовеса с направляющими, часового индикатора, контролирующего усилие опирания противовеса на динамометрическую балку. На монитор выведены табло, дублирующее показания часового индикатора динамометрической балки, секундомер, кнопки управления лифтом.
При работе с интерактивной моделью осуществляют: управление изображением (перемещения и повороты) для получения полного представления о конструкции лабораторного стенда и управление оборудованием (пуск, остановка, задание величин рабочих параметров согласно заданному варианту, замер значений текущих параметров, построение графиков взаимозависимости параметров).
3.2.1. Управление изображением
Управление изображением производится посредством компьютерной мы-
ши.
Перемещение изображения по экрану – перемещением мыши при нажатом ко-
лесе.
Смещение ближе-дальше – вращением колеса мыши
Вращение вокруг оси Х – вращением колеса при нажатой кн. Shift. Вращение вокруг оси Y – перемещением мыши, колесо и кн. Shift нажаты. Вращение вокруг оси Z – перемещением мыши, колесо и кн. Сtrl нажаты.
Перемещение табло по экрану монитора – нажатием правой (левой) кнопки мыши при установленном курсоре в точках Х, У, Z на иконке в правом углу монитора.
3.2.2. Управление оборудованием
Управление оборудованием позволяет задавать параметры модели. Подъем (спуск) кабины осуществляется нажатием и удержанием клавиши
мыши при установленном курсоре на кнопке табло с соответствующей стрелкой.
Увеличение (уменьшение) массы груза в кабине – нажатием соответственно правой (левой) кнопки мыши при установленном курсоре на цифре, обозначающей массу груза в кабине. Массу груза устанавливают в диапазоне 0 – 2 кг с шагом 0,1 кг.
Изменение номинальной частоты вращения вала электродвигателя зада-
ется щелчком мыши по надписи, расположенной рядом с двигателем.
8