

Учебное пособие 3000246
.docГОУВПО «Воронежский государственный
технический университет»
Кафедра робототехнических систем
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
к практическим занятиям
по курсу "Проектирование роботов и РТС"
для студентов специальности 220402
"Роботы и робототехнические системы"
очной и очно-заочной форм обучения
|
Воронеж 2010
Составители: канд. техн. наук В.А. Трубецкой,
канд. техн. наук С.С. Ревнёв
УДК 621.865.8
Методические указания к практическим занятиям по курсу "Проектирование роботов и РТС" для студентов специальности 220402 "Роботы и робототехнические системы" очной и очно-заочной форм обучения / ГОУВПО «Воронежский государственный технический университет»; Сост. В.А. Трубецкой, С.С. Ревнёв. Воронеж, 2010. 34 с.
Методические указания содержат теоретические сведения и практические рекомендации по структурному и функциональному проектированию роботов и РТС. Приведены конкретные варианты расчетов захватных устройств, а также погрешности позиционирования, кинематики и динамики на примерах манипуляторов различной коны\фигурации.
Предназначены для студентов IV - V курсов обучения.
Методические указания подготовлены в электронном виде в текстовом редакторе MS WORD, содержатся в файле proekt_robot_praktika.doc.
Табл. 4. Ил. 5. Библиогр.: 2 назв.
Рецензент канд. техн. наук, доц. А.К. Муконин
Ответственный за выпуск зав. кафедрой д-р техн. наук, проф. А.И. Шиянов
Издается по решению редакционно-издательского совета Воронежского государственного технического университета
ГОУВПО Воронежский государственный
технический университет, 2010
ЗАДАНИЕ № 1
РЕШЕНИЕ ПРЯМОЙ И ОБРАТНОЙ ЗАДАЧ КИНЕМАТИКИ С УЧЕТОМ ТОЛЬКО ПЕРЕНОСНЫХ СТЕПЕНЕЙ ПОДВИЖНОСТИ
Исследование кинематики является важным этапом проектирования манипуляторов. На этом этапе производится стыковка геометрических характеристик проектируемых модулей степеней подвижности и манипулятора в целом с рабочим пространством и рабочей зоной робота; определяются возможности манипулятора с точки зрения кинематики при выполнении тех или иных технологических операций. Результаты таких исследований используются для корректировки конструкторских решений, принятых на предыдущих этапах проектирования.
Для постановки и решения задач кинематики составляют расчетную кинематическую модель манипулятора, в основу которой положены предполагаемые или имеющиеся геометрические размеры звеньев, а также типы, количество и распределение кинематических пар.
В зависимости от поставленной задачи для одного и того же манипулятора можно составить несколько моделей. Рассмотрим вариант, когда учитываются лишь основные (переносные) степени подвижности.
В качестве объекта моделирования рассмотрим типовые компоновки роботов, приведенные на рис. 1. Первая компоновка (рис.1, а) соответствует роботу, работающему в цилиндрической системе координат; вторая (рис.1, б) – роботу, работающему в сферической системе; третья (рис.1, в) – шарнирному роботу, у которого все степени подвижности вращательные.
Первая
компоновка учитывает три основных
степени подвижности робота, работающего
в цилиндрической системе координат.
Три обобщенные координаты
![]() и
и
![]() позволяют определить координаты
позволяют определить координаты
![]() некоторой точки Р манипулятора (например,
полюса схвата):
некоторой точки Р манипулятора (например,
полюса схвата):
![]() ;
;
![]() ;
;
![]() (1)
(1)
Д
1![]() и
и
![]() .
.
а)
б)
в)
Рис. 1. Типовые компоновки манипуляторов
Т
2
![]() ;
;
![]() ;
(2)
;
(2)
![]() .
.
Третья
компоновка (рис.1, в) характеризуется
обобщенными координатами
![]() и
и
![]() .
Тогда координаты точки Р манипулятора:
.
Тогда координаты точки Р манипулятора:
![]() ;
;
![]() ;
(3)
;
(3)
![]() .
.
На
основе полученных соотношений решают
прямую и обратную задачи кинематики.
Прямая задача о положении манипуляторов
заключается в том, что по заданным
относительным перемещениям
![]() в кинематических парах рассчитывают
положение рабочего органа, а также
звеньев манипулятора. С помощью обратной
задачи о положении манипулятора
определяют обобщенные координаты
манипулятора по заданному в опорной
системе координат положению рабочего
органа или некоторого звена манипулятора.
в кинематических парах рассчитывают
положение рабочего органа, а также
звеньев манипулятора. С помощью обратной
задачи о положении манипулятора
определяют обобщенные координаты
манипулятора по заданному в опорной
системе координат положению рабочего
органа или некоторого звена манипулятора.
Для рассматриваемых компоновок обратную задачу можно решить аналитически. Для кинематической модели (рис.1, а):
![]() ;
;
![]() ;
;
![]() (4)
(4)
Для кинематической модели (рис.1, б):
![]() ;
;
![]() ; (5)
; (5)
![]() .
.
Д
3
![]() ;
;
 ; (6)
; (6)
 .
.
ЗАДАНИЕ № 2
РЕШЕНИЕ ЗАДАЧ КИНЕМАТИКИ С УЧЕТОМ ОРИЕНТИРУЮЩИХ СТЕПЕНЕЙ ПОДВИЖНОСТИ МАНИПУЛЯТОРА
При решении задач кинематики будем считать звенья манипулятора (звенья исполнительного механизма) со всеми закрепленными на них элементами твердыми телами и рассматривать манипулятор как механическую систему, для которой справедливы основные положения механики твердого тела. Кинематические соотношения, определяющие положение, скорость и ускорения звеньев манипулятора без учета воздействия управляющих сил и моментов, можно получить, рассмотрев движение каждого звена как твердого тела с учетом связей между ними.
Положение
твердого тела в пространстве может быть
задано шестью независимыми величинами,
например: тремя координатами
![]() какой-либо точки
какой-либо точки
![]() тела и тремя углами, характеризующими
ориентацию системы осей
тела и тремя углами, характеризующими
ориентацию системы осей
![]() ,
связанных с ним, относительно неподвижной
системы
,
связанных с ним, относительно неподвижной
системы
![]() .
Эти углы удобнее всего задавать с помощью
матрицы направляющих косинусов:
.
Эти углы удобнее всего задавать с помощью
матрицы направляющих косинусов:
4
Элемент
![]() этой матрицы представляет собой проекцию
единичного вектора
этой матрицы представляет собой проекцию
единичного вектора
![]() системы осей
на направление
системы осей
на направление
![]() системы
,
т.е. скалярное произведение векторов
и
:
системы
,
т.е. скалярное произведение векторов
и
:
![]() ;
;
![]() ,
,
![]() =1,
2, 3.
=1,
2, 3.
С
учетом взаимной ортогональности систем
векторов
![]() и
и
![]() нетрудно записать шесть соотношений
связывающих между собой девять косинусов:
нетрудно записать шесть соотношений
связывающих между собой девять косинусов:
![]() . (2)
. (2)
В
результате из девяти элементов матрицы
![]() лишь три являются независимыми величинами.
лишь три являются независимыми величинами.
Переменные
и матрица
позволяют записать простые соотношения,
характеризующие преобразования координат
из системы осей
в систему
.
Если положение точки
![]() в системе
,
связанной с телом, задано вектором
в системе
,
связанной с телом, задано вектором
![]() ,
то ее координаты в неподвижной системе
определятся как:
,
то ее координаты в неподвижной системе
определятся как:
![]() . (3)
. (3)
При этом можно получить соотношения, характеризующие связь скоростей и ускорений точки в системах и , а также обратные преобразования названных величин.
К
5![]() систему координат
систему координат
![]() (
=1,
..., n),
можно свести определение взаимного
положения звеньев к задаче преобразования
одной системы связанных осей в другую.
Такое преобразование в трехмерном
пространстве удобно описывать с помощью
специальных матриц размера
(
=1,
..., n),
можно свести определение взаимного
положения звеньев к задаче преобразования
одной системы связанных осей в другую.
Такое преобразование в трехмерном
пространстве удобно описывать с помощью
специальных матриц размера
![]() ,
введение которых тесно связано с понятием
однородных координат проективного
пространства. Если декартовы координаты
точки равны
,
введение которых тесно связано с понятием
однородных координат проективного
пространства. Если декартовы координаты
точки равны
![]() ,
то ее однородными координатами называют
числа
,
то ее однородными координатами называют
числа
![]() ,
не все одновременно равные нулю, связанные
с
равенствами
,
не все одновременно равные нулю, связанные
с
равенствами
![]() ;
;
![]() ;
;
![]() .
.
Если
![]() ,
то однородные координаты определяют
вектор положения следующего вида:
,
то однородные координаты определяют
вектор положения следующего вида:
![]() .
.
При использовании однородных координат различные преобразования в трехмерном пространстве могут быть сведены к композиции двух преобразований – вращения и переноса, которым отвечают матрицы:
 ,
(4)
,
(4)
![]() .
(5)
.
(5)
Результирующая матрица преобразования имеет вид:
![]() .
(6)
.
(6)
В
формулах (4) – (6) приняты обозначения:
– матрица размера
![]() направляющих косинусов осей
направляющих косинусов осей
![]() ,
,
![]() ,
,
![]() относительно осей
относительно осей
![]() ,
,
![]() ,
,
![]() ;
;
![]() – вектор положения точки
в системе осей
;
– вектор положения точки
в системе осей
;
![]() – единичная матрица размера
.
– единичная матрица размера
.
Матрица А характеризует переход от системы осей к системе . Обратному переходу отвечает матрица:
![]() .
(7)
.
(7)
Р
6![]() .
Система
связана со звеном i
и имеет ось
.
Система
связана со звеном i
и имеет ось
![]() ,
совпадающую с осью сочленения звеньев
i
и i+1.
Для пар вращательного типа ось
совпадает с осью относительного поворота,
для поступательных – она параллельна
направлению относительного поступательного
перемещения. Ось
,
совпадающую с осью сочленения звеньев
i
и i+1.
Для пар вращательного типа ось
совпадает с осью относительного поворота,
для поступательных – она параллельна
направлению относительного поступательного
перемещения. Ось
![]() перпендикулярна осям
и
перпендикулярна осям
и
![]() ;
ось
;
ось
![]() – осям
и
и дополняет их до правой триады. Номера
звеньев обозначаются как i
= 0, 1, ..., N.
Индекс 0
соответствует неподвижному основанию,
индекс N
– захвату (рабочему инструменту). Система
осей
– осям
и
и дополняет их до правой триады. Номера
звеньев обозначаются как i
= 0, 1, ..., N.
Индекс 0
соответствует неподвижному основанию,
индекс N
– захвату (рабочему инструменту). Система
осей
![]() не связана с подвижным соединением
звеньев – она определяет ориентацию и
положение захватного устройства.
не связана с подвижным соединением
звеньев – она определяет ориентацию и
положение захватного устройства.
Примеры, показывающие правило разметки звеньев и систем координат с ними связанных, приведены на рис. 1, а.

Р
7
Система
осей
связана с неподвижным основанием О,
при этом ось
![]() направлена вдоль оси звена 1. Система
осей
направлена вдоль оси звена 1. Система
осей
![]() выбрана таким образом: точка
выбрана таким образом: точка
![]() совпадает с геометрическим центром
пары звеньев 1 и 2, ось
совпадает с геометрическим центром
пары звеньев 1 и 2, ось
![]() – с осью этой пары, ось
– с осью этой пары, ось
![]() перпендикулярна осям
и
одновременно, а ось
перпендикулярна осям
и
одновременно, а ось
![]() дополняет оси
и
до правой триады – ее направление
совпадает с положением звена 1. Система
осей
дополняет оси
и
до правой триады – ее направление
совпадает с положением звена 1. Система
осей
![]() выбрана следующим образом: точка
выбрана следующим образом: точка
![]() совпадает с центром соединения звеньев
2 и 3, а ось
совпадает с центром соединения звеньев
2 и 3, а ось
![]() – с осью этой пары, ось
– с осью этой пары, ось
![]() перпендикулярна осям
и
одновременно, а ось
перпендикулярна осям
и
одновременно, а ось
![]() дополняет оси
и
до правой триады – ее направление
совпадает с продолжением звена 2. На
рис. 1,б показана система координат,
связанная с захватным устройством. Ось
дополняет оси
и
до правой триады – ее направление
совпадает с продолжением звена 2. На
рис. 1,б показана система координат,
связанная с захватным устройством. Ось
![]() совпадает с осью звена 3 и характеризует
ориентацию оси захвата. Положение точки
совпадает с осью звена 3 и характеризует
ориентацию оси захвата. Положение точки
![]() может быть выбрано произвольно. Ось
может быть выбрано произвольно. Ось
![]() перпендикулярна
и
,
ось
перпендикулярна
и
,
ось
![]() дополняет
оси
и
до правой триады. Из рис. 1, а видно, что
углы поворота звеньев
дополняет
оси
и
до правой триады. Из рис. 1, а видно, что
углы поворота звеньев
![]() отсчитываются в системах координат
отсчитываются в системах координат
![]() ,
и
соответственно, т.е.
,
и
соответственно, т.е.
![]() (i=1,
2, 3) отсчитывается в системах осей
(i=1,
2, 3) отсчитывается в системах осей
![]() .
.
Приведенные
правила ориентации осей систем координат,
связанных со звеньями, определяют важное
обстоятельство: взаимное положение
систем координат
![]() и
двух соседних звеньев зависит от четырех
параметров, один из которых является
обобщенной координатой, а три других –
конструктивными константами. Матрица
перехода от системы осей
к системе
равна:
и
двух соседних звеньев зависит от четырех
параметров, один из которых является
обобщенной координатой, а три других –
конструктивными константами. Матрица
перехода от системы осей
к системе
равна:
![]() ,
(8)
,
(8)
где
![]() ,
,
![]() ,
,
![]() ,
,
![]() – матрицы, характеризующие четыре
преобразования, выполняемые в следующем
порядке:
– матрицы, характеризующие четыре
преобразования, выполняемые в следующем
порядке:
п
8
оворот системы осей вокруг оси
на угол
вокруг оси
на угол
 ,
обеспечивающий параллельность осей
,
обеспечивающий параллельность осей
 и
.
Он характеризуется матрицей
и
.
Он характеризуется матрицей
 ;
(8)
;
(8)
перенос системы осей вдоль оси на величину
 до того, как оси
и
окажутся на одной прямой. Ему отвечает
матрица
до того, как оси
и
окажутся на одной прямой. Ему отвечает
матрица
 ;
(9)
;
(9)
перенос системы осей вдоль оси на величину
 до совпадения
до совпадения
 и
и
 .
Он характеризуется матрицей
.
Он характеризуется матрицей
 ;
(10)
;
(10)
поворот системы осей
 на угол
на угол
 вокруг оси
до совмещения всех осей. Ему отвечает
матрица
вокруг оси
до совмещения всех осей. Ему отвечает
матрица
 .
(11)
.
(11)
С учетом выражений (8) – (11) запишем матрицу (7) в виде
 .
(12)
.
(12)
К
9![]() зависит от одной обобщенной координаты
(равной
или
)
и определяет положение и ориентацию
системы осей
в системе
.
зависит от одной обобщенной координаты
(равной
или
)
и определяет положение и ориентацию
системы осей
в системе
.
ОПРЕДЕЛЕНИЕ ЭЛЕМЕНТОВ МАТРИЦЫ ПОЛОЖЕНИЯ ДЛЯ МАНИПУЛЯТОРА, РАБОТАЮЩЕГО В ЦИЛИНДРИЧЕСКОЙ СИСТЕМЕ КООРДИНАТ
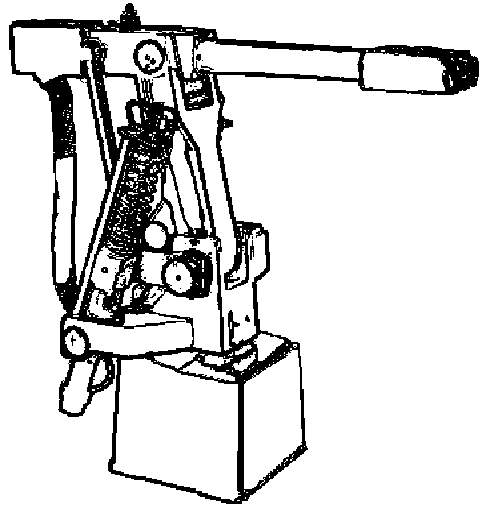
Манипулятор имеет одну вращательную и две поступательные кинематические пары, следовательно, число степеней свободы равно трем. Расчетная и конструктивная кинематические схемы изображены на рис. 2 а и б соответственно.
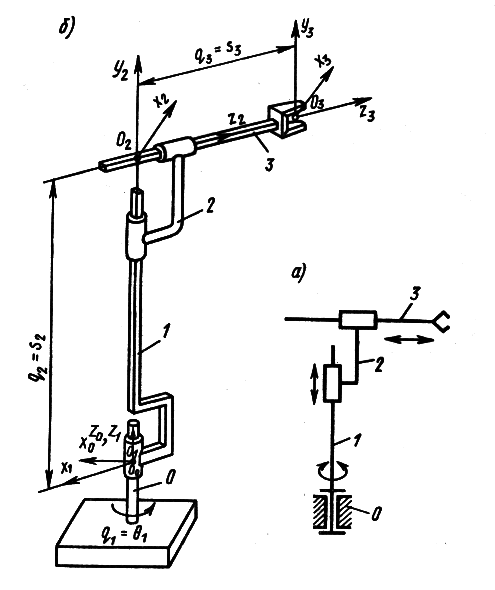
Рис. 2. Расчетная и конструктивная кинематические схемы
манипулятора
С
10![]() идет по оси вращательной пары (0,1), т.е.
по оси вращения тела 1; ось
идет по оси вращательной пары (0,1), т.е.
по оси вращения тела 1; ось
![]() идет по оси пары (1,2), вдоль которой тело
2 поступательно перемещается относительно
тела 1; ось
идет по оси пары (1,2), вдоль которой тело
2 поступательно перемещается относительно
тела 1; ось
![]() идет вдоль оси поступательной пары
(2,3); ось
идет вдоль оси поступательной пары
(2,3); ось
![]() идет также, как ось
.
Направление осей
идет также, как ось
.
Направление осей
![]() и положения начал координат показаны
на рис.1, а.
и положения начал координат показаны
на рис.1, а.
Типы пар и значения параметров приведены в табл. 1.
Таблица 1.
Кинематическая пара |
Тип пары |
№ звена |
Значения параметров |
|||
|
|
|
|
|||
0,1 |
вращательная |
1 |
|
0 |
0 |
0 |
1,2 |
поступательная |
2 |
|
|
|
0 |
2,3 |
поступательная |
3 |
0 |
0 |
|
0 |
Составляем
матрицы
![]() :
:
 ;
; ;
;
 .
(13)
.
(13)
Вычисляем
элементы матрицы
![]() :
:
 .
(14)
.
(14)
З
11
ВЫБОР КОМПОНОВКИ ПРОМЫШЛЕННЫХ РОБОТОВ МОДУЛЬНОГО ТИПА ПО УСЛОВИЯМ ТОЧНОСТИ
Выбор компоновки модульного робота является одним из основных этапов его разработки. Для каждого варианта системы модулей можно сформировать несколько компоновок, решающих задачу обслуживания станков или других элементов технологического оборудования заданного РТК. Однако с точки зрения производительности РТК, качества выполнения работ, затрат на формирование РТК эти компоновки не равноценны. Чтобы сравнить компоновки модульных роботов на этапе их формирования, необходимо для данного РТК определить критерии, характеризующие качество функционирования робота с выбранной компоновкой в данном РТК. Такими критериями могут быть: общее время движения робота в данном РТК; точность позиционирования на рабочих точках РТК; энергетические затраты при выполнении движений; массогабаритные характеристики компоновки; экономические показатели.