

МИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ
ФЕДЕРАЦИИ
Воронежский государственный технический университет
Кафедра робототехнических систем
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
к выполнению лабораторных работ 13-14 по дисциплине
“Теория автоматического управления” для студентов
специальности 210300
“Роботы и робототехнические системы”
очной и очно-заочной (вечерней) форм обучения
Воронеж 2004
Составители: канд.техн.наук Харченко А.П.
канд. техн. наук, Слепокуров Ю.С.
асс. Кольцова В.В.
УДК 612.313
Методические указания к выполнению лабораторных работ 13-14 по дисциплине “Теория автоматического управления” для студентов специальности 210300 “Роботы и робототехнические системы” очной и очно-заочной (вечерней) форм обучения / Воронеж. гос. техн. ун-т; Сост. А.П. Харченко, Ю.С. Слепокуров, В.В. Кольцова. Воронеж, 2004. 17 с.
Рассмотрены методы синтеза технических систем с использованием трех видов моделей.
Представлены методы проектирования параметров качества следящей системы. системы инженерных расчетов Matlab.
Предназначены для студентов 3-4 курса.
Ил. 2., табл. 3. Библиогр: 3 назв.
Рецензент канд. техн. наук В.А. Трубецкой
Ответственный за выпуск зав. каф. д-р техн. наук А.И. Шиянов
Методические указания подготовлены в электронном виде в текстовом редакторе MS Word 7.0 и содержатся в файле metau13.doc.
Издается по решению редакционно-издательского совета
Воронежского государственного технического университета
© Воронежский государственный
технический университет, 2004
Лабораторная работа 13
ИССЛЕДОВАНИЕ АДЕКВАТНЫХ МОДЕЛЕЙ
СИСТЕМ УПРАВЛЕНИЯ
Цель лабораторной работы: получение и исследование адекватных моделей систем автоматического управления, представленных в трех видах.
Теоретические сведения
Синтез систем автоматического регулирования (САР) и управления(САУ) для получения заданных параметров качества осуществляется в пространстве состояний.
В систему управления в этом случае вводится модальный регулятор, на вход которого подаются соответствующие переменные (выходные сигналы в структурной схеме системы) с определенным коэффициентом обратной связи.
Для расчета в системе Matlab коэффициентов обратных связей модального регулятора необходимо иметь навыки получения моделей системы в трех видах:
структурная схема в системе simulink на основе использования блоков Transfer Fnc;
развернутая структурная схема в системе simulink на основе использования блоков integrator;
lti-объект в рабочей области системы Matlab, представленный системой пространства состояний объекта управления.
Это представление необходимо и для последующей проверки полученных результатов при моделировании систем.
Проектируемая система описывается уравнениями n-го порядка, где элементы системы описываются дифференциальными уравнениями порядка не выше 2-го (типовые динамические звенья).
Рассмотрим дифференциальные уравнения, описываемые исследуемую систему управления, например, 4-го порядка.
Таким уравнением описывается система автоматического управления в составе предварительного усилителя, усилителя мощности, исполнительного двигателя, редуктора и датчика обратной связи.
Безинерционный усилитель (предварительный усилитель) описывается уравнением вида
y = K1 * x,
где К1 – коэффициент передачи.
Усилитель мощности описывается уравнением вида
T2 y’ + y = K2 * x,
где К2,Т2 – коэффициент передачи и постоянная времени.
Исполнительный двигатель описывается системой уравнений (без учета нагрузки)

Uн(t) = Iн(t)*Rя + Lя*d Iн(t)/dt + С*ωвр(t)
M = Jн*dωвр(t)/dt.
uде Uн(t) – напряжение двигателя; Iн(t) – ток двигателя; Rя – сопротивление обмоток двигателя; Lя – индуктивность обмоток двигателя; М – электромагнитный момент двигателя; Jн – приведенный момент инерции; С- константа; ωвр(t) – угловая скорость.
Для редуктора исполнительного механизма (кинематической схемы манипулятора) с передаточным числом i, коэффициент передачи определяется
K3 = 1/i.
Звено обратной связи (в обратной связи расположен датчик обратной связи) с коэффициентом передачи Кос.
2

3
При этом нужно подготовить такие исходные данные, чтобы полученная система управления была устойчивой, но с достаточно плохими показателями качества переходного процесса.
Кроме того, исходные данные двигателя должны позволить выделить в его структуре канал тока якоря Iя двигателя.
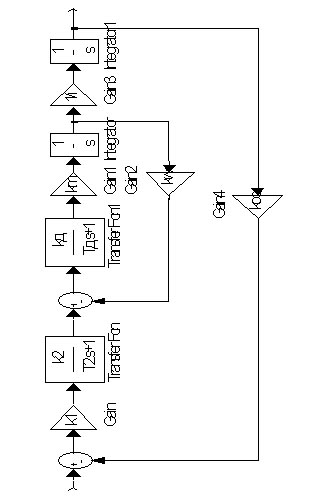
По исходным данным системы , должна быть построена первая модель объекта (то есть структурная схема САУ), которая может выглядеть как на рис. 1.
Для полученной структурной схемы должны быть сняты переходные процессы по переменным (выходным сигналам ):
току двигателя;
скорости вращения;
изменению угла поворота рабочего органа.
Теперь приступаем к построению структурной схемы развернутой модели (согласно второму виду).
Пусть задана передаточная функция вида
W(s)
=
![]() .
.
При делении на старший разряд знаменателя передаточная функция сводится к следующему виду
W(s)=![]() .
.
Cогласно теории графов и формуле Мейсона полученная передаточная функция соответствует следующей структурной схеме системы на рис. 2
4
З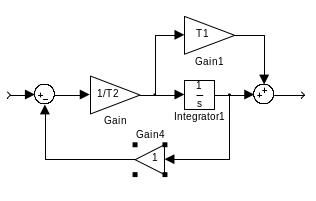 аменив
таким образом все блоки Transfer
Fnc,
получим развернутую структурную схему
системы, при этом необходимо убедиться,
что все три переходных процесса в
полученной системе и исходной
адекватны.
аменив
таким образом все блоки Transfer
Fnc,
получим развернутую структурную схему
системы, при этом необходимо убедиться,
что все три переходных процесса в
полученной системе и исходной
адекватны.
Рис. 2 Структурная схема системы
Третий этап состоит в том, чтобы по полученной развернутой структурной схеме получить Lti-объект в рабочей области.
Для этого необходимо рассчитать значения коэффициентов матриц a, b, c, d и , введя их в рабочую область, получить собственно объект оператором вида
»h = ss (a,b,c,d).
Для проверки адекватности полученного объекта исходной
структуре, необходимо сравнить переходные процессы исходной системы и полученного объекта.
Переходный процесс Lti-объекта можно получить с помощью ввода в рабочую область оператора
»step(h).
5
Однако при этом будет выдана только одна выходная координата, то есть выход системы.
Для просмотра переходных процессов остальных переменных состояния объекта необходимо добавить их координаты в выходной вектор оператором вида
» hp = augstate(h).
Теперь используем оператор для вывода переходных характеристик переменных состояния системы
» step(hp).
Теперь выводится в одно окно переходные процессы всех переменных состояния (например переменная тока, переменная скорости и переменная угла поворота) и собственно выходной координаты системы.