

Учебное пособие 547
.pdfУДК 531.1(07)
ББК 22.21+22.213я7
Составитель Козлов В.А.
КИНЕМАТИКА
Методические указания и контрольные задания по теоретической механике для студентов дистанционной формы обучения
инженерно-строительных специальностей
Приводится описание индивидуальных заданий для контрольных работ по разделу «Кинематика» курса теоретической механики. Даются рекомендации по выполнению работ и примеры расчёта.
Предназначено для студентов дистанционной формы обучения инженерностроительных специальностей.
Ил.4. Табл.4. Библиогр.: 4 назв.
Рецензент: к. т. н., заведующий кафедрой строительной механики Воронежского государственного архитектурно-строительного университета С.В. Ефрюшин
Используется по решению редакционно-издательского совета Воронежского государственного архитектурно-строительного университета
Папка « |
». Файл « |
». Объём - |
Мб. |
Введение
Полный курс теоретической механики содержит три раздела: статика, кинематика и динамика. При выполнении контрольных заданий раздела «Кинематика» необходимо изучить виды движения твёрдых тел: поступательное, вращательное (задача К1) и плоскопараллельное (задача К2).
По учебнику изучать курс рекомендуется по вопросам, приводимым ниже (там же указываются и номера параграфов).
При изучении курса особое внимание следует уделить приобретению навыков решения задач. Для этого, изучив материал данной темы, надо сначала обязательно разобраться в решениях соответствующих задач, которые приводятся в учебнике, обратив особое внимание на методические указания по их решению. С целью закрепления полученных знаний можно решить самостоятельно несколько аналогичных задач из сборника И.В. Мещерского. После этого решение соответствующей задачи из контрольного задания не вызовет существенных затруднений.
Указания по выполнению контрольных заданий приводятся ниже после контрольных вопросов, ими следует руководствоваться при решении соответствующих задач. Кроме того, к каждой задаче приводится пример решения.
Контрольные вопросы по кинематике
1.Способы задания движения точки [1, §§36, 37], [3, §§62-65].
2.Скорость и ускорение точки при векторном способе задания её движения [1, §§38, 39], [3, §§66, 70].
3.Скорость и ускорение точки при координатном способе задания движения
[1, §40], [3, §§68, 71].
4.Скорость и ускорение точки при естественном способе задания движения [1, §§42, 43], [3, §§67, 72, 73].
5.Частные случаи движения точки [1, §44], [3, §74].
6.Поступательное движение твёрдого тела, его свойства [1, §48], [3, §78].
7.Вращательное движение твёрдого тела вокруг неподвижной оси [1, §49], [3, §79].
8.Частные случаи вращения [1, §50], [3, §79].
9.Скорости и ускорения точек вращающегося твёрдого тела [1, §51], [3, §80].
10.Передаточные механизмы [3, §83].
11.Плоскопараллельное движение твёрдого тела [1, §52], [3, §§85-86].
12.Теорема о сложении скоростей при плоском движении тела [1, §54], [3, §87].
13.Теорема проекции скоростей двух точек твёрдого тела [1, §55], [3, §87].
14.Мгновенный центр скоростей, его существование и единственность [1, §56], [3, §90].
15.Частные случаи определения положения мцс [1, §56], [3, §90].
16.Теорема о сложении ускорений при плоском движении тела [1, §58], [3, §96].
Библиографический список
Основной
1.Тарг С.М. Краткий курс теоретической механики: учебник: рек. МО РФ / С.М. Тарг. – 17-е изд., стер. – М.: Высшая школа, 2007. – 415 с.
2.Бать М.И., Джанилидзе Г.Ю., Кельзон А.С. Теоретическая механика в примерах и задачах. Т.1. Статика и кинематика: учеб. пособие. 9-е изд.,
стер. – СПб.: издательство «Лань», 2010. – 672 с. Дополнительный
1.Яблонский А.А., Никифорова В.М. Курс теоретической механики. Ч.1. – М.: Высшая школа, 2001. – 343 с.
2.Мещерский И.В. Задачи по теоретической механике: учеб. пособие. 50-е изд., стер. / Под ред. В.А. Пальмова – СПб.: Издательство «Лань», 2010. – 448 с.
Содержание заданий, выбор вариантов, порядок выполнения работ
Студенты заочной формы обучения в разделе «Кинематика» выполняют контрольную работу №2: задачи К1, К2.
К каждой задаче приводятся две таблицы, первая из которых содержит 10 рисунков, а вторая дополнительные к тексту задачи условия. Студент во всех задачах выбирает номер рисунка по предпоследней цифре номера своей зачётной книжки, а номер условия в таблице – по последней. Например, если номер зачётной книжки оканчивается числом 37, то берутся рис.3 и условие №7 из таблиц для каждой из задач.
Контрольные работы выполняются в обычной ученической тетради, страницы которой нумеруются. На обложке разборчиво указываются: вверху номер зачётной книжки, далее номер контрольной работы по дисциплине, специальность, фамилия и инициалы студента, внизу год издания контрольных заданий и адрес студента.
Задачи обязательно начинать на развороте тетради (на чётной странице, начиная со второй, иначе работу трудно проверять). Сверху указывается номер задачи, далее делается чертёж (можно карандашом) и записывается, что в задаче дано и что требуется определить (текст задачи не переписывается). Чертёж выполняется с учётом условий решаемого варианта задачи и должен быть аккуратным и наглядным. Все векторы подписываются, отдельные величины можно выделить цветом (кроме красного). Там, где это требуется, следует изобразить систему координат. Решение задачи необходимо сопровождать краткими пояснениями (какие формулы или теоремы применяются, откуда получаются те или иные результаты и т.п.) и подробно излагать весь ход расчётов. На каждой странице следует оставлять поля для замечаний рецензента.
Работы, не отвечающие всем перечисленным требованиям, проверяться не будут, а будут возвращаться для переделки.
Работу над ошибками (если таковые обнаружены рецензентом) можно проводить в той же тетради на оставшихся чистых листах. К работе, высылаемой на повторную проверку (если она выполнена в другой тетради), должна обязательно прилагаться не зачтённая работа. На зачёте или экзамене необходимо представить зачтённые по данному разделу курса работы, в которых все отмеченные рецензентом погрешности должны быть исправлены.
Методические указания по решению задач, входящих в контрольные работы, даются для каждой задачи после её текста под рубрикой «Указания», затем приводится пример решения аналогичной задачи. Цель примера – разъяснить ход решения, но не воспроизвести его полностью, поэтому в ряде случаев промежуточные расчёты опускаются. Но при выполнении контрольной работы все преобразования и числовые расчёты должны быть обязательно последовательно проделаны с необходимыми пояснениями; в конце должны быть даны ответы.
Задачи для контрольных работ
ЗАДАЧА К1
Механизм состоит из ступенчатых колёс 2-4, находящихся в зацеплении или связанных ременной передачей, рейки или груза, привязанного к концу нити, намотанной на одно из колёс.
В столбцах «Дано» таблицы 1.2 указан закон движения или закон изменения скорости одного из звеньев механизма ( s1(t) – закон движения рейки или груза в см, v1(t) – закон изменения скорости рейки или груза в см/с, φ(t) – закон вращения колеса в рад, ω(t) – закон изменения угловой скорости соответствующего колеса в 1/с) , заданы радиусы r2, r3, r4 в см. Положительное направление для φ и ω – против хода часовой стрелки, для s1 и v1 направление оси x показано на рисунках таблицы 1.1. В момент времени t = 2 с определить скорость и ускорение точки М, а также величины, указанные в столбце «Найти».
Указания. Задача К1 относится к разделу «Поступательное и вращательное движения твёрдого тела. Передаточные механизмы» [1, §§48-51], [3, §§78-80, 83]. Следует учесть, что при внешнем или внутреннем зацеплении колёс скорости и касательные ускорения соприкасающихся точек совпадают (ω1r1 = ω2r2, ε1r1 = ε2r2), как и скорости и касательные ускорения точек ремня, соединяющего соответствующие колёса. Два колеса, имеющие общую ось вращения, жёстко связаны между собой, имеют одинаковые углы поворота, угловые скорости и угловые ускорения.

Пример К1. |
|
|
|
3 |
|
Дано: s1(t) = 5t2 + 2 см; t = 2 с; |
|
|
|||
r2 = 10 см, r3 = 15 см, r4 = 20 см. |
4 |
|
|
||
Найти: vM, aM, v1, a1 |
|
|
|
||
|
2 |
|
|
||
Решение. По условию задачи |
|
М |
|||
|
|
||||
задан закон движения груза 1. Так |
|
|
|
||
как он движется поступательно, то |
|
|
|
||
его скорость движения определяется |
|
|
|
||
как производная по времени от |
1 |
|
|||
закона движения, а ускорение – как |
|
||||
производная по времени от скорости |
х |
|
|
||
|
|
||||
(производная |
по |
времени |
|
|
|
|
|
||||
обозначается |
точкой |
вверху). |
Рис. 1.1. Условие задачи |
||
Следовательно, |
|
|
|||
|
|
|
|
|
|
|
|
10 (см/с2); |
v (2) 10 2 20 (см/с). |
|
|
v s1 10t |
; a v1 |
|
|||
1 |
1 |
|
1 |
|
|
Скорость груза совпадает со скоростью точек нити, которая сходит по касательной с колеса 2. Тогда из общих формул для скоростей и ускорений точек вращающегося твёрдого тела v h a h , где h – это расстояние от
точки до оси вращения, можно определить угловую скорость и угловое ускорение вращения колеса 2:
|
2 |
v |
/ r , |
2 |
20 /10 2 |
(1/с); |
2 |
a |
/ r , |
|
2 |
10 /10 1 (1/с2). |
|
1 |
2 |
|
|
1 |
2 |
|
|
||||
Так как колеса 2 и 4 имеют общую ось вращения, то их угловые скорости |
||||||||||||
и ускорения совпадают: 2 4 |
2 (1/с), |
2 |
4 |
1 |
(1/с2). |
|||||||
При передаче вращательного движения отношение угловых скоростей и ускорений обратно пропорционально отношению радиусов соответствующих колёс. В рассматриваемом случае вращение от 4 колеса передаётся к 3. Тогда
|
4 |
|
r3 |
→ 3 r4 4 20 2 2,7 (1/с); |
|
|
|
||||||||||||
3 |
r4 |
|
|
|
|||||||||||||||
|
|
|
|
|
r3 |
|
15 |
|
|
|
|
|
|
||||||
|
4 |
|
|
r3 |
|
→ |
3 |
r4 |
|
4 |
20 1 1,3 (1/с2). |
|
|
|
|||||
|
|
r |
|
|
|
||||||||||||||
|
|
3 |
|
|
|
r |
|
15 |
|
|
|
|
|
|
|||||
|
|
|
4 |
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|||
Так как точка М находится на ободе колеса 3, то её скорость и ускорение |
|||||||||||||||||||
определяются по формулам |
v h |
3 |
, a h |
2 |
4 , где |
h r . |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
3 |
3 |
|
vM 15 2,7 40,5 |
(см/с); aM 15 1,32 |
2,74 |
111,07 (см/с2). |
||||||||||||||||
Ответ: vM = 40,5 см/с; aM = 111,07 см/с2; v1 = 20 см/с; a1 = 10 см/с2.
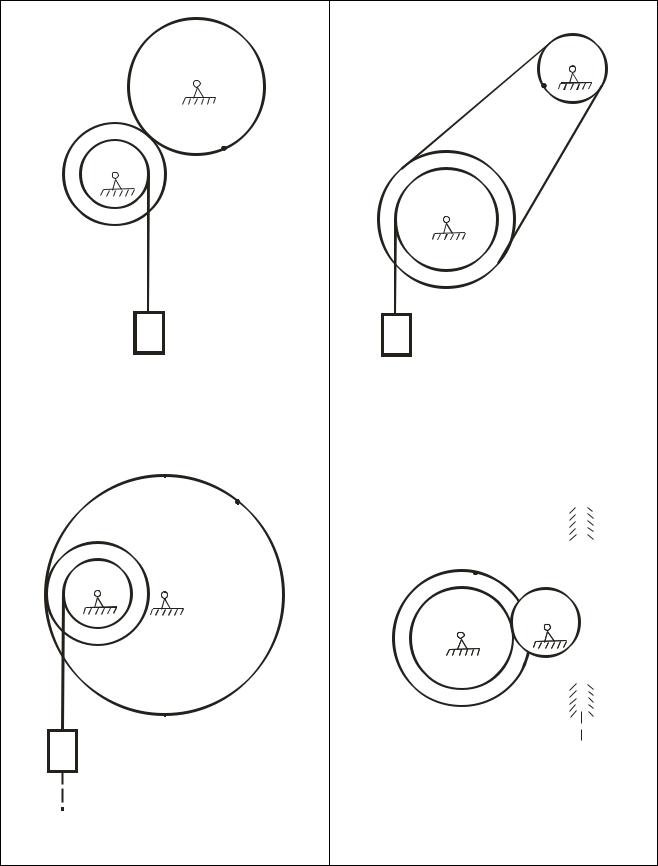
Таблица 1.1 Варианты рисунков к задаче К1 (предпоследняя цифра шифра)
4 |
2 |
|
М
3 |
2 |
М |
|
4
3
1 |
1 |
|
|
|
|
|
||
х |
|
|
х |
Рис. 1 |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
||||
|
|
|
|
|
|
|||
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
||
Рис. 0 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
4 |
М |
|
|
|
|
|
||
|
|
|
|
|
|
|
||
3 |
|
|
|
М |
|
|
|
|
|
|
|
|
|
1 |
|||
2 |
|
4 |
|
|
|
|
|
|
|
|
3 |
2 |
|
|
|
||
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
х
1
х
Рис. 2 |
Рис. 3 |
3 |
4 |
М |
|
2 |
|||
|
1
х
4 |
3 |
|
2 |
||
|


 х
х
М |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Рис. 4 |
|
|
|
Рис. 5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
М |
|
|
|
|
|
|
||||
3 |
3 |
|
|
|
|
|
|
|
|
||
2 |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
||||
М
4
4 2
|
|
|
|
|
|
|
1 |
|
|
|
|
|
1 |
|
|
|
|
х |
|
|
|
||||
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
||||
|
|
|
х |
|
|
|
|
|
|
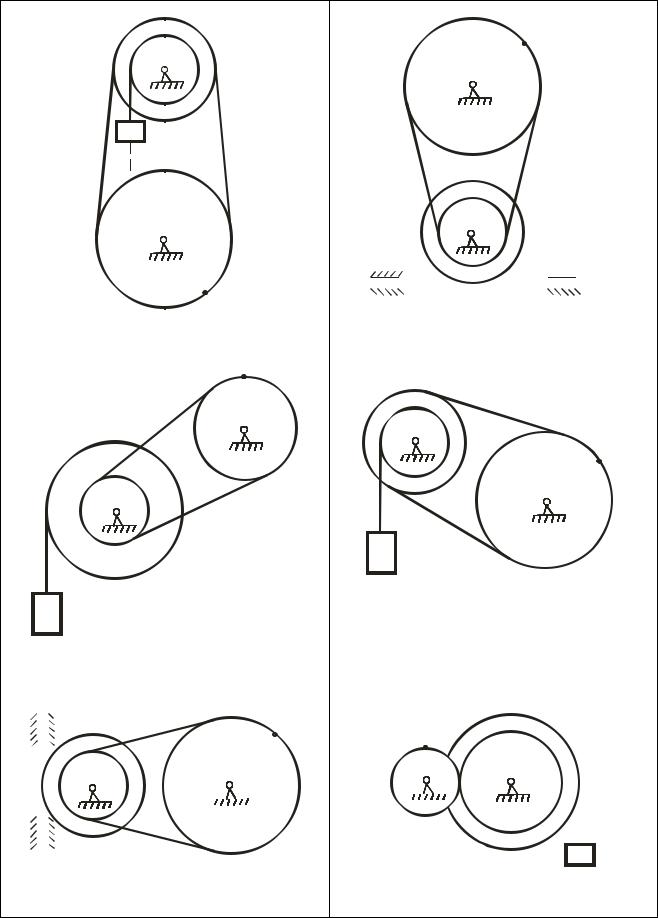
Рис. 7 |
||
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
||||
|
|
|
Рис. 6 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
М |
|
|
М |
4 |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
3 |
|
|
||
|
|
3 |
4 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
||||
|
|
2 |
|
|
2 |
|
|
|
|
|||
1 |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
х |
|
|
|
|
|
|
1 |
||
|
|
|
|
|
|
|
|
|
||||
|
|
|
Рис. 8 |
|
|
|
|
|
|
х |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
Рис. 9 |
|||
|
Исходные данные к решению задачи К1 |
|
Таблица 1.2 |
|||
|
|
|
||||
|
|
|
|
|
|
|
Последняя |
Дано |
|
|
|
|
Найти |
цифра |
|
|
|
|
|
|
s(t),v(t), (t), (t) |
|
|
|
|
||
шифра |
r2 |
r3 |
|
r4 |
|
|
0 |
s 4(7t t 2 ) |
2 |
3 |
|
4 |
3 , 3 |
|
1 |
|
|
|
|
|
1 |
2 7t 3t 2 |
2 |
4 |
|
5 |
v1, a1 |
2 |
2 2t 2 9 |
4 |
5 |
|
8 |
v1 , a1 |
3 |
v 2(t 2 3) |
3 |
4 |
|
6 |
3 , 3 |
|
1 |
|
|
|
|
|
4 |
4 3t t 2 |
3 |
5 |
|
6 |
v1, a1 |
5 |
s 2t 2 5 |
5 |
7 |
|
11 |
3 , 3 |
|
1 |
|
|
|
|
|
6 |
4 2(t 2 3t) |
3 |
5 |
|
7 |
v1, a1 |
7 |
2 8t 3t 2 |
5 |
6 |
|
10 |
v1 , a1 |
8 |
v 3t 2 8 |
6 |
7 |
|
9 |
3 , 3 |
|
1 |
|
|
|
|
|
9 |
4 5t 2t 2 |
4 |
5 |
|
6 |
v1, a1 |
ЗАДАЧА К2
Плоский механизм состоит из двух стержней, ползуна В (вертикальная или горизонтальная направляющая) и цилиндра С, катящегося по неподвижной поверхностибезпроскальзывания. Необходимые для расчета данные приведены в таблице 2.2. Механизмприводится в движение кривошипом ОА=15 см, равномерно вращающимся против хода вращения часовой стрелки с угловой скоростью . Радиус цилиндра равен 10 см. Точка G находится посередине звена АВ. Горизонтальные и вертикальные размеры указаны на рисунках 0-9 таблицы 2.1 и относятся к неподвижным объектам: шарнирам, опорным плоскостям и линиям движения ползунов.
Для заданного положения механизма определить:
1.Скорости точек А, В, С, G, F и N с помощью мгновенных центров скоростей;
2.Ускорения точек А и В и угловое ускорение звена АВ.
Указания. Задача К2 относится к разделу «Плоскопараллельное движение твёрдого тела» [1, §§52, 54-56], [3, §§85-87, 90]. Следует учесть, что в общем случае положение мгновенного центра скоростей (МЦС) звена плоского механизма определяется точкой пересечения перпендикуляров к направлениям скоростей конечных точек этого звена. Если скорости параллельны, то МЦС
находится в бесконечности, звено совершает мгновенно-поступательное движение, при котором скорости всех точек звена в данный момент времени равны между собой как по модулю, так и по направлению. Для колеса, которое катится по поверхности, МЦС находится в точке соприкосновения колеса с
этой поверхностью. При этом скорости |
|
точек пропорциональны |
|
их расстояниям до соответствующих МЦС.
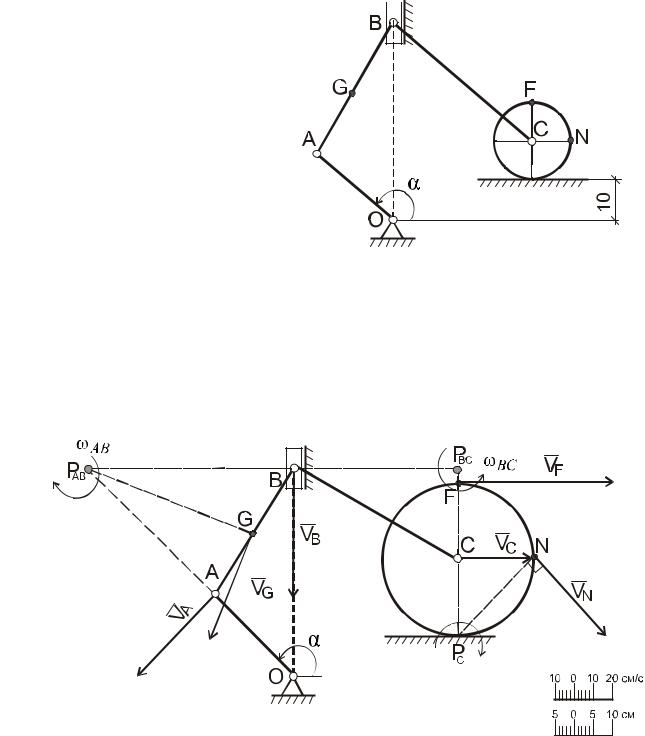
Пример К2.
Дано: R=20 см, ОА=30 см, АВ=40 см, ВС=50 см,
АG=GB=20 см, 1350
ωОА = 2 1/с.
Найти: 1) vA ,vB ,vG ,vC ,vF ,vN ;
2) aA , aB , AB .
Рис. 2.1. Схема механизма в заданном положении
Решение.
1) ОпределениескоростейточекиугловойскоростизвенаАВ.
Изобразим механизм по заданным размерам звеньев (в масштабе) и углу . Нахождение скоростей точек необходимо начинать с определения скорости точки А ведущего звена ОА механизма, движение которого задано.
Рис.2.2. Определение скоростей точек механизма с помощью МЦС
ВычисляеммодульскороститочкиАкривошипаОАпризаданномположении механизма:

vA OA OA 30 2 60 (см/с).
Вектор скорости точки А перпендикулярен ОА и направлен в сторону вращения кривошипа. Скорость ползуна В направлена вдоль прямой, по которой может перемещаться ползун В, то есть вертикально. Мгновенный центр скоростей РАВ звена АВ находится в точке пересечения перпендикуляров, проведенных
из точек А и В к направлениям векторов их скоростей. Так как скорости точек А и В звена АВ пропорциональны расстояниям от этих точек до МЦС, то для определения скорости точки В записываем соотношения
vA vB . APAB BPAB
Расстояния от точек А и В до мгновенного центра скоростей РАВ определяем измерением на чертеже с учетом масштаба: APAB 47 см и BPAB 55 см. В соответствии с этим
vB |
vA |
ВРАВ |
60 |
55 70,21 (см/с). |
|
АРАВ |
47 |
||||
|
|
|
|||
Определив модуль скорости точки В, |
находим направление вектора vB . |
||||
По направлению скорости точки А и положению мгновенного центра скоростей РАВ устанавливаем, что вращение звена АВ происходит по часовой стрелке.
Поэтому вектор скорости точки В при заданном положении механизма направлен вниз.
Аналогично определяем модуль скорости точки G (GPAB = 47 см из чертежа):
|
|
vA |
|
vG |
|
→ v |
G |
|
vA |
GP |
60 47 60 (см/с). |
|
|
|
|
|
|||||||
|
APAB GPAB |
|
|
|
AB |
47 |
|||||
|
|
|
|
APAB |
|||||||
Вектор |
vG направлен |
перпендикулярно |
отрезку GРАВ в сторону, |
||||||||
соответствующую направлению вращения звена АВ вокруг МЦС. Аналогично находим скорость центра цилиндра С. Мгновенный центр
скоростей РВС звена ВС лежит на пересечении перпендикуляров к векторам
скоростей точек В и С. Для определения скорости точки С записываем соотношение
vB vC . BPBC CPBC
Расстояния от точек В и С до мгновенного центра скоростей РВС определяются измерениями на чертеже с учетом масштаба: ВPBС 43 см и СPBC 24 см. В соответствии с этим
v |
C |
|
vB |
CP |
70,21 24 39,19 (см/с). |
|
|||||
|
|
BPBC |
BC |
43 |
|
|
|
|
|