

Учебное пособие 469
.pdfМинистерство образования и науки Российской Федерации
Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования
«Воронежский государственный архитектурно-строительный университет»
Кафедра строительной техники и инженерной механики им. д.т.н., проф. Н. А. Ульянова
РАВНОВЕСИЕ ПРОИЗВОЛЬНОЙ ПЛОСКОЙ СИСТЕМЫ СИЛ
Задания и методические указания по теоретической механике для самостоятельной работы студентов дневной формы обучения строительных специальностей
Воронеж, 2012
УДК 531.8 ББК 22.2
Составитель
А. В. Черных
Рецензент
А. Н. Синозерский, канд. техн. наук, проф. кафедры строительной механики Воронежского ГАСУ
Печатается по решению редакционно-издательского совета Воронежского ГАСУ
Равновесие произвольной плоской системы сил: задания и метод. указа-
ния по теоретич. механике для самост. работы студ. дневной формы обучения строит. спец. / Воронежский ГАСУ; сост.: А. В. Черных. — Воронеж, 2012. — 15 с.
Приводится описание индивидуальных заданий на расчетно-графическую работу для студентов, изучающих раздел «Статика» курса теоретической механики. Даются рекомендации по выполнению работы и пример расчета.
Предназначены для самостоятельной работы студентов дневной формы обучения строительных специальностей.
Ил. 9. Библиогр.: 4 назв.
УДК 531.8 ББК 22.2
ВВЕДЕНИЕ
По первому разделу теоретической механики — статике — для проверки и закрепления теоретических знаний и практических навыков решения задач выдаются контрольные задания. В них входит наиболее важный в практическом отношении материал курса.
Для успешного решения задач совершенно необходимо четкое знание теоретических положений по данному разделу курса. Особое внимание следует обратить на типы связей, их условные обозначения и то, как направлены реакции связей. Рекомендуется повторить разделы элементарной геометрии и тригонометрии, связанные с треугольником (свойства, подобие, тригонометрические функции).
Вариант задания (номер рисунка и числовые данные из прил. 1 и 2) дает преподаватель.
Выполненное задание оформляется в тетради для практических занятий. Иллюстрации выполняются карандашом или чернилами, желательно в цвете, все векторы обязательно подписываются. Там, где это требуется, необходимо изобразить систему координат.
По ходу решения следует давать краткие пояснения.
При сдаче работы студент должен дать исчерпывающие пояснения по тексту, уметь ясно излагать основные теоретические положения и отвечать на контрольные вопросы по темам «Система сил, расположенных произвольно», «Момент силы относительно точки» [1, гл. 4, 5; 2, гл. 3—5].
1. СОДЕРЖАНИЕ ЗАДАНИЯ
Во всех вариантах задания требуется найти реакции опор рамы, представляющей собой плоскую ломаную линию, состоящую из трех прямолинейных участков.
2.ОСНОВНЫЕ ТИПЫ СВЯЗЕЙ
ИИХ УСЛОВНЫЕ ОБОЗНАЧЕНИЯ: КРАТКИЕ ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ
Связями по отношению к рассматриваемому телу называются другие тела, ограничивающие перемещения данного тела в пространстве. Реакцией связи называется сила, с которой связь воздействует на данное тело.
Реакция связи всегда направлена в сторону, противоположную той, куда связь препятствует перемещаться данному телу.
3
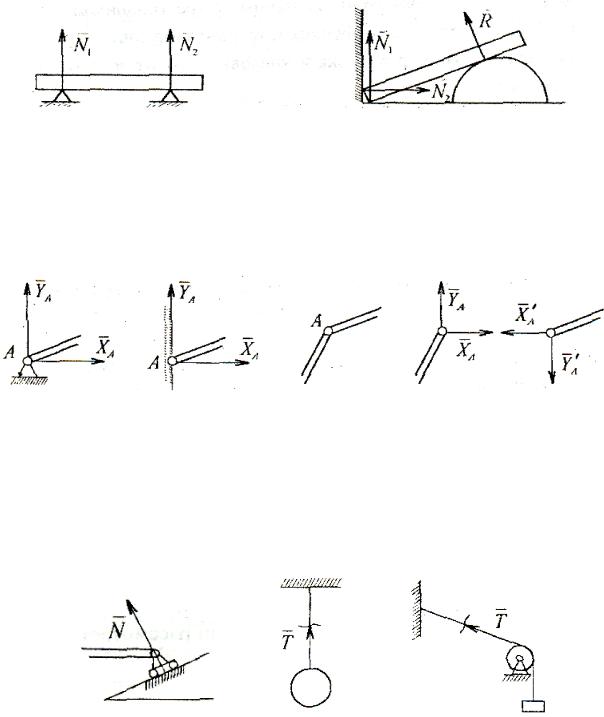
1. Гладкая поверхность. Реакция направлена по общей нормали к поверхностям в точке соприкосновения. Если одна из поверхностей вырождается в точку, то по нормали к другой поверхности (рис. 2.1).
Рис. 2.1
2. Неподвижный цилиндрический шарнир. Реакция лежит в плоско-
сти, перпендикулярной оси шарнира, и ее направление в этой плоскости неизвестно. При решении задач с помощью уравнений равновесия реакцию разлагают на две составляющие по осям координат (рис. 2.2).
Рис. 2.2
3.Подвижный цилиндрический шарнир. Реакция проходит через ось шарнира и направлена перпендикулярно поверхности, по которой возможно перемещение основания шарнира (рис. 2.3).
4.Невесомая нить. Реакция направлена по нити в сторону отброшенной части (рис. 2.4).
Рис. 2.3 |
Рис. 2.4 |
5.Стержень. Реакция невесомого стержня, закрепленного шарнирно
инагруженного только на концах, направлена по стержню. Если вектор, изображающий силу реакции, с которой данный стержень действует на
4
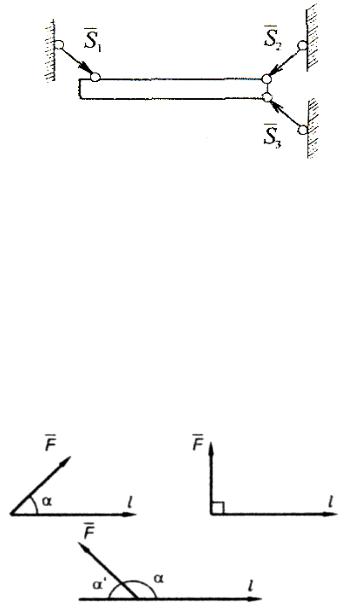
шарнирный болт (узел), изображенный на самом стержне, направлен от болта (узла), то стержень растянут. Если же этот вектор направлен к болту (к узлу), то стержень сжат (рис. 2.5).
Рис. 2.5
Проекцией вектора на ось называется скалярная величина, равная произведению модуля вектора на косинус угла между положительным направлением оси и направлением вектора (рис. 2.6). Здесь возможны три случая:
1)если угол α острый, то Fx = Fcosα > 0;
2)если угол α прямой, то Fx = 0;
3)если угол α тупой, то Fx = Fcosα = –Fcosα' < 0.
В третьем случае проекцию вектора удобнее подсчитывать через косинус острого угла α', беря соответствующее произведение со знаком «минус».
Рис. 2.6
Алгебраическая величина момента силы относительно какой-либо точки равна взятому со знаком «плюс» или «минус» произведению модуля силы на ее плечо, т. е. на длину перпендикуляра, опущенного из этой точки на линию действия силы.
Понятие о моменте силы относительно точки является одним из важнейших понятий механики. Обобщая это понятие, можно находить момент силы относительно любой точки, независимо от того, может ли в действительности тело вращаться вокруг этой точки.
Точка, относительно которой определяют момент силы, называются центром момента.
5
Обозначая момент силы F относительно центра О символом M0(F) и плечо относительно данного центра буквой h, будем иметь
M0 F Fh.
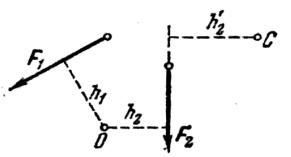
Если сила стремится повернуть тело вокруг центра моментов в направлении, противоположном ходу стрелки часов, то момент считается положительным, если по ходу стрелки часов — то отрицательным.
Для силы F1 (рис. 2.7) будем иметь
M0 F Fh1 1,
для силы F2 имеем
M0 F2 F2h2 .
Нужно отметить, что момент одной и той же силы может иметь и положительное, и отрицательное значение в зависимости от взаимного расположения силы и центра моментов, т. е. той точки, относительно которой берется момент. Так, например (рис. 2.7), момент силы F2 относительно точки О равен
M0 F2 F2h2 ,
а момент той же силы относительно точки С равен
MC F2 F2h2' .
Рис. 2.7
Из определения момента силы относительно точки следует:
1)момент силы относительно данной точки не изменяется при переносе силы вдоль ее линии действия, так как при этом не изменяется ни модуль силы, ни ее плечо);
2)момент силы относительно данной точки равен нулю, если линия действия силы проходит через эту точку, так как в этом случае равно нулю плечо силы.
Система двух равных по модулю, параллельных и противоположно
'называется парой сил. Плоскость, в которой на-
', называется плоскостью действия па-
ры сил (рис. 2.8).
6
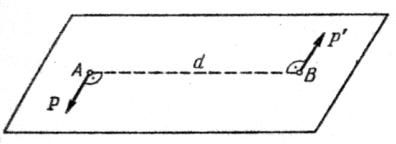
Рис. 2.8
Пара сил не имеет равнодействующей, однако силы пары не уравновешиваются, так как они не направлены по одной прямой. Пара сил стремится произвести вращение твердого тела, к которому она приложена.
Пара сил, не имея равнодействующей, очевидно, не может быть уравновешена силой.
Кратчайшее расстояние d между линиями действия сил, составляющих пару, называется плечом пары сил.
Действие пары сил на твердое тело характеризуется ее моментом.
Момент пары сил определяется произведением модуля одной из сил пары на ее плечо:
MPd.
Вэтом случае момент пары сил определяют произведением модуля сил на плечо пары сил, взятым со знаком «плюс» или «минус», т. е. момент пары сил рассматривают как алгебраическую величину
M Pd.
Момент пары сил считают положительным, если пара сил стремится вращать плоскость чертежа в сторону, противоположную вращению часовой стрелки, и отрицательным — в сторону вращения часовой стрелки.
3.ОБЩИЕ УКАЗАНИЯ
КВЫПОЛНЕНИЮ ЗАДАНИЯ
Решение задач на равновесие одного твердого тела, находящегося под действием произвольной системы сил, рекомендуется проводить в следующем порядке:
1)выделить твердое тело, равновесие которого необходимо рассмотреть, чтобы затем найти неизвестные силы;
2)изобразить активные силы;
3)используя принцип освобождаемости от связей, отбросить их, заменяя соответствующими силами реакций связей, и проверить статическую определенность задачи;
4)выбрать удобные оси декартовых координат и центры моментов;
7

5)составить три независимых уравнения равновесия;
6)решая систему уравнений, определить неизвестные реакции связей. При решении задач можно использовать любую из трех форм урав-
нений равновесия для произвольной плоской системы сил:
n |
|
n |
|
|
|
n |
|
|
|
|
|
|
||||
Fkx 0; |
Fky |
0; m0 |
|
0; |
(2.1) |
|||||||||||
Fk |
||||||||||||||||
k 1 |
|
k 1 |
|
|
|
k 1 |
|
|
|
|
|
|
||||
|
|
n |
|
|
|
n |
|
|
|
|
|
|
||||
|
|
Fkx 0; mA |
|
|
0; |
|
||||||||||
|
|
Fk |
|
|||||||||||||
|
|
k 1 |
|
|
|
k 1 |
|
|
|
|
|
(2.2) |
||||
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
mB |
Fk |
0, AB Ox; |
|
|||||||||||
|
|
k 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
n |
|
|
|
|
|
n |
|
|||||||
mA |
|
0; |
mB |
|
|
0; |
mC |
|
0, |
(2.3) |
||||||
Fk |
Fk |
Fk |
||||||||||||||
k 1 |
|
k 1 |
|
|
|
|
|
k 1 |
|
|||||||
точки A, B, C не лежат на одной прямой.
При этом нужно стремиться, чтобы в каждое уравнение входило минимальное число неизвестных величин, лучше всего одна. Но это не должно быть самоцелью. Если такие уравнения трудно составить (сложно найти плечи сил), то лучше использовать первую форму уравнений равновесия и решать их совместно.
Уравнения моментов составляются относительно точек, в которых пересекается наибольшее число линий действия неизвестных сил.
Если в результате решения задачи знак алгебраической величины ка- кой-либо силы оказывается отрицательным, то это означает, что ее направление противоположно первоначально выбранному на чертеже.
Необходимо помнить, что по закону действия и противодействия давление данного тела на связь равно по величине и противоположно по направлению реакции связи.
4.УСЛОВИЕ ЗАДАЧИ
ИПРИМЕР ВЫПОЛНЕНИЯ ЗАДАНИЯ
Жесткая рама закреплена в точке A шарнирно, а в точке B прикреплена либо к невесомому стержню с шарнирами на концах, либо к шарнирной опоре на катках.
В точке C к раме привязан трос, перекинутый через блок и несущий на конце груз весом P =25 кН. На раму действуют пара сил с моментом M =60 кНм и две силы, величины которых, направления и точки приложения указаны в прил. 1 (например, в условиях № 2 на раму действуют сила
F2 под углом 15° к горизонтальной оси, приложенная в точке D, и сила F3
8

под углом 60° к горизонтальной оси, приложенная в точке E, и т. д.), а также равномерно распределенная нагрузка интенсивности q, которая действует на участке, указанном в прил. 1.
Определить реакции связей в точках A, B, вызываемые действующими нагрузками. При окончательных расчетах принять α = 0,5 м.
Указания. Задача — на равновесие тела под действием произвольной плоской системы сил. При ее решении следует учесть, что натяжения обеих ветвей нити, перекинутой через блок, когда трением пренебрегают, будут одинаковыми. Уравнение моментов будет более простым (содержать меньше неизвестных), если брать моменты относительно точки, где пересекаются линии действия реакций связей. При вычислении момента силы
F часто удобно разложить ее на составляющие F1 и F2 , для которых плечи легко определяются, и воспользоваться теоремой Вариньона; тогда
m0 F m0 F1 m0 F2 .
ПРИМЕР ВЫПОЛНЕНИЯ ЗАДАНИЯ
Дано:
F =25 кН, =60°, P=18 кН, =75°, M =50 кНм, q=2 кН/м,=30°, a=0,5 м (рис. 3.1).
Рис. 3.1
Определить реакции в точках A, B, вызываемые действующими нагрузками.
9

Решение:
1. Рассмотрим равновесие пластины. Проведем координатные оси xy и
изобразим действующие на пластину силы: силу F , пару сил с моментом
M, натяжение троса T (по модулю T P), равномерно распределенную нагрузку интенсивности q, действующую на участке BC, заменяем сосредоточенной силой Q (по модулю Q q 2a=2 кН), которая приложена посере-
дине участка BC, и реакции связей XA , YA , RB (реакцию неподвижной шарнирной опоры A изображаем ее двумя составляющими, реакция шарнирной опоры на катках направлена перпендикулярно опорной плоскости).
2. Для полученной плоской системы сил составим три уравнения
равновесия. При вычислении момента силы F относительно точки A вос-
пользуемся теоремой Вариньона, т. е. разложим силу F на две состав-
ляющие: F , F (F Fcos ,F Fsin ), и учтём, что
mA F mA F mA F .
Получим |
|
|
|
Fkx 0, |
|
XA RB sin Fcos Q Tsin 0; |
(3.1) |
Fky 0, |
YA RB cos Fcos T cos 0; |
(3.2) |
|
mAFk 0, |
M RB cos 4a Fcos 2a Fsin 3a |
(3.3) |
|
|
|
|
|
Tsin 2a Q a 0.
Подставив в составленные уравнения числовые значения заданных величин и решив эти уравнения, определим искомые реакции.
Ответ. XA= -10,246 кН, YA= -22,810 кН, RB = 6,719 кН. Знаки указы-
вают, что силы XA , YA направлены противоположно показанным на рис. 3.1.
Выполним проверку решения. Для этого составим еще одно дополнительное уравнение моментов относительно такой точки, чтобы в урав-
нение вошли найденные реакции XA , YA , RB . Например, в качестве проверочного можно записать уравнение моментов относительно точки E:
mEFk |
0, M RB sin 2a RB cos a T cos 3a |
|
(3.4) |
|
YA 3a XA 2a Q a 0,001 0. |
При указанных значениях XA , YA , RB последнее уравнение равно нулю с точностью до третьего знака после запятой (погрешность зависит от ошибки, с которой вычислялись искомые реакции), следовательно, задача решена верно.
10