

Методическое пособие 722
.pdfНа практике учитывается только первый член ряда (рис. 1.36) или лишь первая гармоника.
Ее амплитуда определяется как максимальный статический синхронизирующий элемент Мmах или сила Рmах.
Различают два основных режима работы ШД: статический – коммутация фаз не производится, и длительное время возбуждена одна из комбинаций; и режим перемещения – осуществляется последовательным перебором комбинаций.
Режим перемещения разделяют на режим приемистости, когда частота коммутации изменяется по произвольному скачкообразному закону, и режим плавного изменения частоты. Рабочие свойства ШД в первом случае ограничиваются предельной динамической характеристикой 1 (рис. 1.37)
иопределяются параметрами ШД: усилием и инерционностью нагрузки. Во втором случае рабочие свойства ШД ограничиваются предельной механической характеристикой 2 и определяются способом регулирования фазного напряжения в функции частоты. Влияние инерционности нагрузки
иротора исключается.
ВШД реализуются на базе асинхронных машин (величина шага составляет от 15 до 60°), сельсинов и синхронных двигателей. Рассмотрим синхронные ШД как наиболее распространенные. Они разделяются на двигатели с жесткой и гибкой связью между подвижным и неподвижным элементами. Гибкая связь обычно имеет магнитный характер. Жесткие связи могут выполняться на основе системы храповых механизмов, толкателей, защелок, фиксаторов или на основе катящихся и гибких волновых роторов. По виду перемещения ротора относительно воздушного зазора ШД разделяются на двигатели с перпендикулярным перемещением (волновой и катящийся роторы) и с параллельным перемещением (на базе обычных СД).
Пример ШД с катящимся ротором представлен на рис. 1.38, где изображен статор 1 с катушками 2, попеременно подключаемыми к источнику напряжения U. Ротор 3 эксцентрично расположен в расточке статора. При шаговом вращении поля статора ротор обкатывается по расточке, совершая одновременно редуцированное вращение вокруг собственной оси, которая с помощью зубчатых передач передается выходному валу.
Двигатели с волновым ротором отличаются тем, что их тонкостенный полый ротор, выполненный из ферромагнитного материала, может деформироваться под действием сил магнитного притяжения. Ротор приобретает форму многоугольника, число выступов-вершин которого совпадает с числом полюсов поля. Деформации ротора ограничиваются цилиндрическими направляющими, на которые ротор опирается непосредственно или через гибкие катки. Вращение на выходной вал передается от ротора через зубчатые муфты. По сравнению с катящимся, гибкий ротор обладает меньшим моментом инерции и обеспечивает работу без шума и вибрации.
40
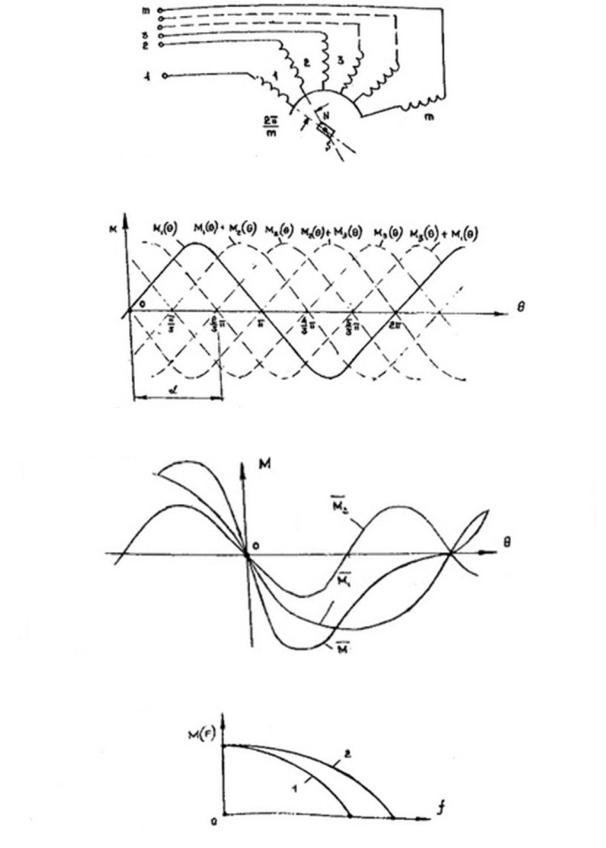
Рис. 1.34
Рис. 1.35
Рис. 1.36
Рис. 1.37
41
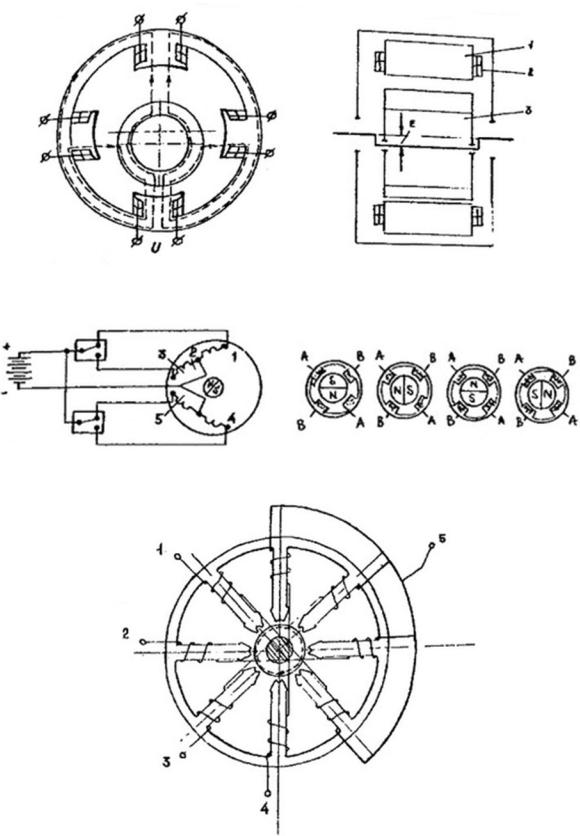
Рис. 1.38
Рис. 1.39
Рис. 1.40
42
Пример ШД с катящимся ротором представлен на рис. 1.38, где изображен статор 1 с катушками 2, попеременно подключаемыми к источнику напряжения U. Ротор 3 эксцентрично расположен в расточке статора. При шаговом вращении поля статора ротор обкатывается по расточке, совершая одновременно редуцированное вращение вокруг собственной оси, которая с помощью зубчатых передач передается выходному валу.
Двигатели с волновым ротором отличаются тем, что их тонкостенный полый ротор, выполненный из ферромагнитного материала, может деформироваться под действием сил магнитного притяжения. Ротор приобретает форму многоугольника, число выступов-вершин которого совпадает с числом полюсов поля. Деформации ротора ограничиваются цилиндрическими направляющими, на которые ротор опирается непосредственно или через гибкие катки. Вращение на выходной вал передается от ротора через зубчатые муфты. По сравнению с катящимся, гибкий ротор обладает меньшим моментом инерции и обеспечивает работу без шума и вибрации.
ВШД на базе СД подразделяются на переменно-полюсные (с активным ротором) и ШД с переменным магнитным сопротивлением (с пассивным ротором).
Переменно-полюсные ШД имеют расщепленные обмотки, питаемые однополярными прямоугольными напряжениями. Схема двухфазного ШД, обмотка которого для упрощения коммутирующего блока расщеплена на 4, показана на рис. 1.39. При поочередном перебрасывании каждого из ключей (такт коммутации) поле статора смещается на 90º.
ШД с переменным магнитным сопротивлением подразделяются по типу возбуждения на индукторные, реактивные и индукторно-реактивные.
У индукторных ШД имеются зубчатый пассивный ротор и гребенчатые зубцовые зоны статора, каждая из которых сдвинута относительно зубцов
ротора ZR на угол 2 π / m ZR, а также контур возбуждения, образованный магнитом или совокупностью фазных обмоток, потокосцепление которого
постоянно и не зависит |
от |
положения ротора. Схема индукторного ШД |
с самовозбуждением за |
счет |
составляющей тока в фазах изображена на |
рис. 1.40. Число зубцов ротора такой машины, в зависимости от числа фаз m, числа фазных зон на одну фазу q и порядка расположения фаз, определяется формулой
( ),
где m и а – взаимно простые числа.
При а = 1 смежные фазы занимают соседние полюсные выступы, при а = 2 – через 1 и т.д.
При отсутствии индуктивных связей между фазами каждую из них можно рассматривать как дроссель, индуктивность которого периодически зависит от угла поворота ротора. В этом случае ток в фазе резко несинусоидален. Каждая фаза создает бесконечный спектр пульсирующих моментов. Основными явля-
43
ются два синхронных вращающих момента, один из них (активный или индукторный) пропорционален постоянной составляющей тока в фазе и равен нулю при разнополярной коммутации, другой (реактивный) пропорционален квадрату переменной составляющей тока в фазе и не зависит от постоянной составляющей.
Любой трехфазный СД с циклической симметрией индуктивных связей между фазами и явнополюсным невозбужденным ротором является реактивным и может быть использован в качестве ШД.
При этом потокосцепление постоянных составляющих не замыкается через зазор, вытесняется на пути рассеяния и не участвует в электромеханическом преобразовании энергии.
На рис. 1.41 показана магнитная система трехфазного реактивного ШД с гребенчатыми зонами на статоре (редукторный двигатель). Взаимные электромагнитные связи симметричны, электромагнитный момент созда тся переменной составляющей тока.
У индукторно-реактивных ШД (не имеющих отдельно контурного возбуждения) в условиях разнополярного управления развивается только реактивный момент, а при однополярной коммутации одновременно действуют активный и реактивный моменты, стремящиеся вращать ротор в разные стороны, соотношение между амплитудами зависит от скважности импульсов.
Конструкции ЛШД с гибкой магнитной связью образуются в результате топологических преобразований вращающихся прототипов и весьма перспективны для приводов ПР.
Принцип действия однокоординатного ЛШД поясняет рис. 1.42: над рядом зубцов индуктора 1, равномерно распределенных с шагом τи, перпендикулярно оси двигателя расположены m магнито-проводов якоря 2 с фазными обмотками 3, причем шаг распределения магнито-проводов равен
τи (1 ± τи/m).
Контур потока фазы показан пунктиром.
Имеются ЛШД, выполненные на основе магнитного винта, индуктор которых имеет две степени свободы, линейную и поворотную. Их достоинством является то, что по конструкции они незначительно отличаются от вращающихся прототипов.
Однокоординатные ЛШД с плоским зазором позволяют при сочетании пары таких двигателей получать двухкоординатное перемещение на плоскости без применения направляющих кареток. Соединение этого ЛШД с вертикальным ЛШД позволяет осуществить перемещение в трехмерном пространстве, что характерно для ПР.
Пример расположения индуктора 1, якорей 2 и 3 для двухкоординатного перемещения приведен на рис. 1.43.
44

Рис. 1.41
Рис. 1.42
45
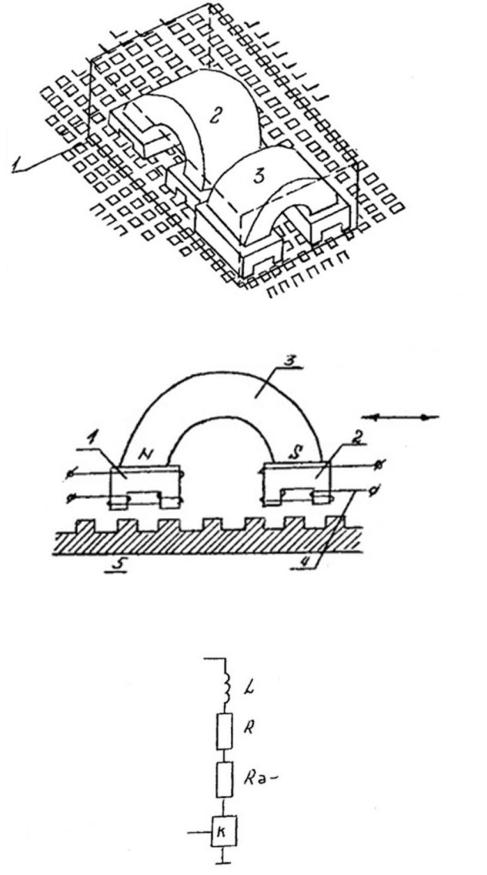
Рис. 1.43
Рис. 1.44
Рис. 1.45
46
Схема одного из якорей показана на рис. 1.44, где два П-образных магнитопровода 1 и 2 охвачены магнитом 3 и фазными катушками 4 и расположены над плоским зубчатым пассивным индуктором 5. Полюсы якоря при последовательном переходе от крайнего левого к крайнему правому имеет сдвиг 0, τ/2, 2τ/4, 3τ/4, что обеспечивает при поочередной коммутации фаз возможность перераспределять поток между полюсами и смещать точку устойчивого равновесия на τ/4 вдоль стрелки в ту или иную сторону.
Возможность перемещения подвижной части такого ЛШД по любой траектории в плоскости с постоянным рабочим зазором наилучшим образом реализуется в случае применения аэростатических опор, обеспечивающих при практически полном отсутствии трения гарантированный зазор, не превышающий, как правило, 20 мкм.
Основное применение двухкоординатные ЛШД находят в приводах манипуляторов для автоматической сборки, укладки и распайки жгутов кабеля, перемещения и складирования грузов, проверки и распайки в процессе изготовления микросхем и т.д.
По сравнению с механическими системами на основе прецизионных ходовых винтов, направляющих и кареток при той же точности позиционирования и быстродействии ЛШД на порядок и более выше. В частности, при числе фаз m = 8, величине шага 0,25 мм на реальном ЛШД получена точность позиционирования 10 мкм при рабочем поле до 2×3 м, ЛШД обеспечивают ускорение 10–20 м/с2.
ШД являются разновидностью синхронных двигателей с частотным регулированием скорости, вследствие чего схемы управления ими представляют собой статические преобразователи частоты.
Любая СУ ШД включает в себя в том или ином объеме следующие элементы:
1.Преобразователи входной информации – преобразователи кода и распределители импульсов.
2.Инверторы (усилители мощности или коммутаторы), переключающие фазы ШД в заданной последовательности. Они делятся на нереверсивные (для управления индукторными ШД с самовозбуждением и ШД с активным ротором при расщеплении фаз) и реверсивные (для управления ШД при нерасщепленных фазах, требующих подачи разнополярных импульсов).
3.Регуляторы напряжения (тока), как правило, выполняются импульсными и обеспечивают регулирование напряжений (токов) в функции частоты
управления для поддержания постоянства момента, развиваемого ШД,
ирасширения диапазона рабочих частот привода.
4.Элементы обратной связи используются для построения локально– замкнутого привода (режим бесконтактного ДПТ).
Инверторы для ШД выполняются в основном с явно выраженным звеном постоянного тока. Большинство инверторов для ШД являются нереверсивными, представляющими собой многоканальные усилители, число каналов которых
47

равно числу фаз, а каждый канал образован последовательно соединенными ключом и фазой.
Для инверторов ШД характерна взаимосвязь элементов собственно инвертора и регулятора напряжения. Это вызвано тем, что в управлении ШД нельзя использовать обычные законы изменения фазного напряжения в функции частоты, применяемые для частотно–регулируемых приводов, так как имеется принципиальное запаздывание. Оно обусловлено заданием входной информации в виде последовательности импульсов и невозможностью измерения частоты по первым входным импульсам, которые определяют время отработки. По этой причине в приводе ШД регулирования напряжения обеспечивается только различными способами форсирования переходных процессов нарастания и спадания тока в коммутируемых фазах, что сводится
ктрем нижеизложенным методам ограничения тока.
1.Ограничения путем постоянного включения последовательно с фазой активного резистора – резистивная форсировка.
Введение резистора снижает постоянную времени фазы ШД в kф раз
(рис. 1.45):
где kф – коэффициент форсирования; |
– постоянная времени фазы после |
форсирования; – сопротивления добавочного резистора;
– собственная постоянная времени фазы.
Иногда вводят общий резистор последовательно с группой фаз (рис. 1.46). Здесь диоды предназначены для обеспечения минимальной скорости протекания процесса спадания тока.
Лучшее использование ключей по напряжению обеспечивает введение в цепь разряда источника, подключенного к фазе через диод (рис. 1.47). В этом случае форма напряжения на отключаемой фазе близка к прямоугольной, что наиболее эффективно с точки зрения как минимизации времени процесса отключения, так и установленной мощности.
2. Переключение фазы двигателя в пределах такта с повышенного уровня U на напряжение Uкз – импульсная форсировка.
Она осуществляется:
–в функции времени, когда время приложения к фазе импульса повышенного напряжения не зависит от изменения параметров ШД и питающего напряжения. Оно принимается постоянным или изменяющимся по выбранному закону в функции частоты управления;
–в функции тока, когда время приложения импульса является функцией тока и изменяется при изменении параметра ШД.
48
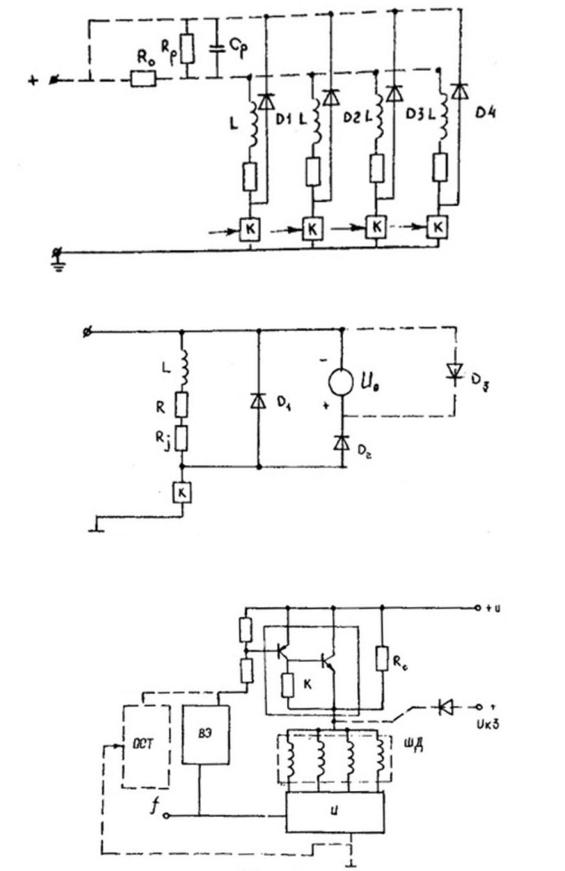
Рис. 1.46
Рис. 1.47
Рис. 1.48
49