

Методическое пособие 703
.pdfРис. 2.3 Схема замещения двигателя постоянного тока
Из выражения (2.3) для электромагнитного момента якоря видно, что для изменения направления вращения якоря, необходимо изменить направление тока в обмотке якоря (- I) (или в обмотке возбуждения (- ), если двигатель возбуждается не постоянными магнитами, а обмоткой возбуждения).
Перепишем выражение (2.7) в виде:
Iя |
U Ce n |
, |
(2.8) |
|
|||
|
Rя |
|
|
Из последней формулы можно сделать вывод, что двигатель постоянного тока автоматически изменяет величину тока,
потребляемую от источника в соответствии с изменением механической нагрузки на валу.
Пусть, например, момент сопротивления на валу двигателя увеличивается, тогда скорость двигателя начнет снижаться, это будет сопровождаться уменьшением обратной ЭДС в соответствии с формулой (2.4) и нарастанием тока якоря в соответствии с формулой (2.8) и вращающего момента двигателя в соответствии с формулой (2.3). Возрастет и потребляемая от источника мощность.
71

Свойства двигателей постоянного тока определяются совокупностью их характеристик: пусковые, рабочие, механические, регулировочные. Важнейшей из которых является механическая характеристика.
По своим рабочим характеристикам двигатели постоянного тока с постоянными магнитами аналогичны двигателям постоянного тока с параллельным (независимым) возбуждением. Двигатели выпускаются как для приводов с регулируемой частотой вращения, так и для приводов, требующих стабилизированной частоты вращения. Частота вращения регулируется с помощью изменения значения напряжения питания, которое иногда достигается за счет включения последовательно с якорем дополнительного сопротивления.
В двигателях постоянного тока при их включении, когда n=0 (якорь неподвижен в начальный момент пуска) пусковой ток ограничивает значение:
U IП RЯ
(2.9)
и по сравнению с номинальным током может быть в 10 20 раз выше, т.е. Iп/Iн=10 20. Такой ток является опасным для мощных двигателей. Кроме того получается короткое замыкание для источника питания. Поэтому непосредственное включение при пуске может быть допущено только для маломощных двигателей (у таких двигателей сопротивление обмотки якоря достаточно велико и . Iп/Iн 2). По мере разгона ЭДС Е возрастает и ток якоря уменьшается до номинального значения.
При больших значениях тока якоря пусковой ток снижают введением в обмотку якоря резистора сопротивлением R или уменьшают напряжение U внешнего
72

источника.
Двигатели постоянного тока по способу питания цепи обмотки якоря делят на два типа:
1 Двигатели с независимым возбуждением: с возбуждением постоянными магнитами (рис.2.4,а) и с обмоткой возбуждения (ОВ) (рис.2.4,б).
2.Самовозбуждающиеся двигатели: с последовательным возбуждением (сериесные или последовательного типа рис.2.4,в), с параллельным возбуждением (шунтовые рис.2.4,г) и со смешанным возбуждением (компаундные рис.2.4,г).
Свойства двигателей постоянного тока определяются совокупностью их характеристик: пусковых, рабочих механических, регулировочных. Важнейшей из которых является механическая характеристика:
|
n = f(M) |
(2.10) |
Механическая |
характеристика |
электродвигателя |
показывает зависимость частоты вращения вала от момента нагрузки на нем. Если увеличение нагрузки не вызывает изменения частоты вращения вала, считают, что такой электродвигатель обладает абсолютно жесткой механической характеристикой. Если происходит незначительное уменьшение частоты вращения вала с увеличением момента нагрузки на валу считается, что такой электродвигатель обладает жесткой характеристикой. А у электродвигателей с мягкой механической характеристикой даже незначительное увеличение нагрузки на валу вызывает
заметное уменьшение частоты вращения. |
Вид |
|
||
механической |
характеристики |
определяет |
место |
|
электродвигателя в электромеханическом устройстве. |
На |
|||
основании формул (3, 4, 7) можно получить аналитическое выражение для механической характеристики.
73
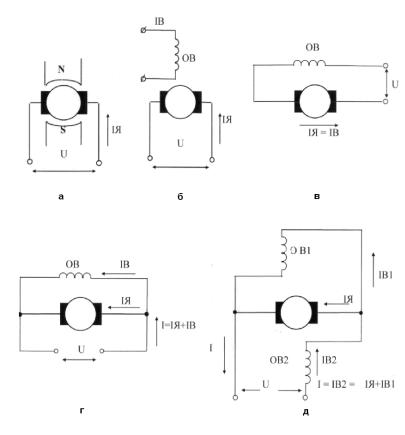
Рис. 2.4. Схемы возбуждения двигателей постоянного тока
|
n |
U |
|
|
RЯ |
М |
(2.11) |
|
|
|
СМФ |
||||
|
|
CEФ СЕ |
|
|
|||
Механические |
характеристики |
различных |
двигателей |
||||
постоянного тока приведены на рис. 2.5. |
|
||||||
|
|
|
|
|
74 |
|
|

Рис. 2.5. Механические характеристики двигателей постоянного тока: 1 - независимое возбуждение; 2 - параллельное возбуждение; 3 - смешанное возбуждение; 4 - последовательное возбуждение
Электрические машины в соответствии с принципом обратимости могут работать как в режиме двигателя так и генератора. При этом к валу генератора подводится механическая мощность Р1, а снимается с зажимов обмотки якоря – электрическая Р2. Двигатель наоборот, потребляет от сети электрическую энергию, а с вала снимается механическая. По отношению к сети генератор является источником, а двигатель - потребителем.
В случае с генератором электромагнитная сила
Fэм = B L I носит тормозной характер, ЭДС и ток в проводниках (обмотке якоря) совпадают по направлению, а в случае электродвигателя сила (момент) имеет двигательный характер, ЭДС и ток в обмотке имеют противоположные направления.
В режиме двигателя эту ЭДС называют противоЭДС, она является основной составляющей, уравновешивающей напряжение источника. Уравнения напряжений будет иметь
75
вид
E = Uг + I∙rпр , |
Uг =I∙ r , |
E > Uг – генератор, |
U = E + I∙ rв + I rпр , |
U > E – двигатель |
|
2.2. Основные способы исследования характеристик электродвигателей постоянного тока
Во многих случаях характеристики электродвигателя, применяемого в аппаратуре, определяют основные технические параметры разработанного изделия, поэтому знание способов снятия этих характеристик имеет большое значение.
Увеличение выпуска электродвигателей, повышение требований к их характеристикам сопровождается разработкой прогрессивных методов измерения, создание быстродействующей измерительной аппаратуры.
К основным характеристикам электродвигателей относят:
-рабочие;
-механические;
-регулировочные.
При снятии характеристик двигателей используют стандартные и нестандартные измерительные приборы: электромагнитные моментомеры, регулировочные источники питания, цифровые вольтметры и амперметры, частотомеры.
Основная проблема с которой приходиться сталкиваться при измерении характеристик электродвигателей состоит в том, что промышленность не выпускает стандартной измерительной аппаратуры для этих целей, а это влечет за собой массу недоразумений и споров при определении некоторых параметров электродвигателей. Например, КПД электродвигателя определяется как
76
= Р2 / Р1 , |
(2.12) |
где Р1 – электрическая мощность, Вт подводимая к электродвигателю, измеряется очень точно и очень легко, методом вольтметра – амперметра,
P1 U I |
(2.13) |
а вот Р2 – механическая полезная мощность, развиваемая на валу определяется как
P2 M |
и ли так запишемP M n, |
P2 0105,M n, Вт |
|
где М – вращающий момент (H м ), n – об / мин., измеряются нестандартными приборами.
2.2.1.Измерение момента
Для измерения вращающих моментов при использовании электродвигателей получили широкое распространение различные тормоза – моментомеры: фрикционные, электродинамические, электромагнитные.
В настоящее время наиболее распространенным прибором является электромагнитный моментомер, разработанный и ранее выпускаемый небольшими партиями в НИИ электромеханики г. Воронежа.
77

Гибкие |
Ротор |
Статор |
Груз, массой |
Рис. 2.6. схема электромагнитного тормоза |
Основную суть конструкции такого тормоза можно представить следующим образам: При вращении ротора моментомера (тонкостенный цилиндр, насаженный на вал электродвигателя) в неподвижном поле статора, созданного обмоткой возбуждения в нём возникают вихревые токи, магнитные поля которых взаимодействуют с магнитным полем статора и в результате чего статор оказывает тормозящее действие на ротор и отклоняется в туже сторону, что и ротор. На статоре укрепляется груз – противовес и стрелка для измерения вращающегося момента.
Ротор выполняется как правило из немагнитного токопроводящего материала: алюминий или медь.
Наличие токопровода к поворачивающегося на шарикоподшипниках электромагнитам создает трудно учитываемый момент, который приводит к дополнительным погрешностям при измерении малых моментов.
Для ликвидации токопроводов к подвижному измерительному узлу была предложена конструкция тормоза – моментомера с неподвижной обмоткой возбуждения и специальной рамкой магнитопровода.
Разработанные моментомеры позволяет измерять
78
моменты электродвигателей в пределах 0,5 – 5000 Г см. Подобные моментомеры имеют сокращение: ТЕС – тормоз единой серии. Например ТЕС – 2 – 15. Первая цифра указывает на габарит прибора, последующие на максимальный измеряемый момент в граммосантиметрах.
Для измерения нагрузочного момента необходимо обеспечить подключения тормоза – моментомера к сети электромагнитного тормоза.
При вращении ротора в неподвижном магнитном поле статора, созданного обмоткой возбуждения в нем возникает вихревые токи, магнитные поля которых взаимодействуют с постоянного тока с регулируемым напряжением 0 – 24 В.
Тормоза – моментомеры потребляют ток не более 0,5 А.
2.2.2. Измерение частоты вращения
Диапазон скоростей вращения микроэлектродвигателей чрезвычайно широк – от тысячных долей до сотен тысяч оборотов в минуту.
Можно выделить следующие основные методы измерения скорости вращения:
-аналоговый метод прямого преобразования;
-метод сравнения;
-частотный метод.
Метод прямого преобразования основан на преобразовании частоты вращения в центробежную силу, вращающий момент, электрическое напряжения, давление и т.д., которые в свою очередь преобразуются в удобные для измерения величины – электрический ток, напряжение, угол закручивания пружины. Точность такого метода невысока.
Метод сравнения основан на сравнении измеряемой скорости вращения с эталонной. Этот метод более точен. На основе этого метода строят тахометры: фрикционные, стробоскопические, вибрационные.
79

В стробоскопических тахометрах проводят сравнение скорости вращения исследуемого двигателя с частотой световых импульсов, а вибрационных с резонансной частотой вибраторов. Стробоскопические тахометры позволяют проводить измерения бесконтактным способом. Это является большим их преимуществом, однако они неудобны для измерения быстроменяющихся по величине скоростей вращения, т.к. требуют постоянной настройки на каждую скорость.
При использовании частотного метода датчик прибора преобразует измеряемую скорость вращения в частоту электрических импульсов, которая измеряется частотомером.
Два варианта подобных датчиков с использованием оптопар (светодиод + фототранзистор) представлены ниже.
а) б)
Рис. 2.7. Модуляторы светового потока фотоэлектрических датчиков
Модулятор представляет собой диск с нанесенными сегментами ( рис. 2.7,а) закрепленный на вращающемся валу или нанесенным на нем секторами (рис. 2.7,б) по разному отражающими свет.
Частота вращения в этом случае:
60 f
n |
|
(2.14) |
|
||
|
k |
|
80