

ФГБОУ ВПО «Воронежский государственный
технический университет»
Кафедра графики, конструирования и информационных
технологий в промышленном дизайне
Методические указания
к контрольной работе по теме «Кинематический анализ»
по дисциплине «Теория механизмов и машин»
для студентов направления 151700.62 «Машиностроение»
(профиль «Оборудование и технология сварочного
производства») очной формы обучения
Воронеж 2012
Составители: канд. техн. наук Ю.Б. Рукин, канд. техн. наук Р.А. Жилин, канд. техн. наук А.В. Демидов, ст. преп. И.Ю. Кирпичев
УДК 621.81
Методические указания к контрольной работе по теме «Кинематический анализ» по дисциплине «Теория механизмов и машин» для студентов направления 151700.62 «Машиностроение» (профиль «Оборудование и технология сварочного производства») очной формы обучения / ФГБОУ ВПО «Воронежский государственный технический университет»; сост. Ю.Б. Рукин, Р.А. Жилин, А.В. Демидов, И.Ю. Кирпичев. Воронеж, 2012. 50 с.
Целью контрольных заданий является оказание помощи студентам и преподавателям в проведении практических занятий по решению задач, включаемых в индивидуальные задания и контрольные работы.
Предназначены для студентов третьего курса.
Методические указания подготовлены в электронном виде в текстовом редакторе MS WORD и содержатся в файле «МУ_Кинематика.doc».
Ил. 5. Библиогр.: 4 назв.
Рецензент д-р техн. наук, проф. В.А. Нилов
Ответственный за выпуск зав. кафедрой д-р техн. наук, проф. А.В. Кузовкин
Издается по решению редакционно-издательского совета Воронежского государственного технического университета
ФГБОУ ВПО «Воронежский государственный
технический университет», 2012
Планы скоростей и ускорений шарнирного четырехзвенника
При решении задач такого типа известны угловая скорость 1 ведущего звена 1 – кривошипа, длины звеньев и координаты неподвижных точек.
Последовательность решения задачи:
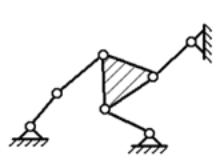
1. Строится план механизма (рис. 1) в выбранном масштабе длин:
![]() ,
м/мм,
,
м/мм,
где LOA – длина кривошипа, м;
AO – длина отрезка, изображающего кривошип на плане механизма, мм.
Для построения плана механизма остальные длины звеньев и координаты неподвижных точек шарнирного четырехзвенника (рис. 2) переводятся масштабом длин mL в отрезки:
AB = LAB/mL, мм,
BC = LBC/mL, мм,
OC = LOC/mL, мм.
2. Составляются векторные уравнения линейных скоростей отдельных точек, принадлежащих звеньям механизма.
Векторное уравнение для звена 2 (шатуна):
VВ = VА + VВА, (1)
где VА = VАО – скорость точки А, которая равна скорости точки А относительно оси вращения кривошипа точки О;
VВА – вектор относительной скорости точки В шатуна относительно А имеет направление, перпендикулярное отрезку АВ на плане механизма.
Векторное уравнение для звена 3 (коромысла):
VВ = VС + VВС. (2)
Так как точка С (ось вращения коромысла 3) неподвижна, то её скорость равна нулю (VС = 0), а вектор относительной скорости точки В относительно С (VВС) имеет направление, перпендикулярное отрезку ВС на плане механизма.
3. Строится план скоростей механизма – это не что иное, как графическое изображение на чертеже векторных уравнений (1) и (2) в каком-либо масштабе.