

Динамика точки и системы / ДИНАМИКА
.pdfЕсли проекция главного вектора всех внешних сил системы на какую-либо ось равна нулю, то проекция главного вектора количества движения системы на ту же ось при движении системы остается постоянной.
121

3.19. Теорема о движении центра масс механической системы
По теореме о количестве движения механической системы
dQ |
N |
|
|
= Fk(e) |
(1) |
||
dt |
|||
k =1 |
|
Количество движения системы:
Q = MvC |
(2) |
где М – масса системы, а |
– скорость центра масс. |
|
|
vC |
122 |
Подставляем (2) в (1) :
|
dvC |
N |
|
N |
|
|
M |
= Fk(e ) |
или |
MaC = Fk(e) |
(3) |
||
|
||||||
|
dt k =1 |
|
k =1 |
|
||
где aC – ускорение центра масс.
Сравним уравнения (3) с дифференциальным уравнением движения материальной точки:
N
MaC = Fk(e) k =1
ma = F
123

m → M a → aC
N
F → Fk(e)
k =1
Центр масс механической системы движется так же, как материальная точка, масса которой равна массе всей системы и на которую действуют все внешние силы, действующие на систему.
124

Дифференциальные уравнения движения центра масс в аналитической форме:
|
N |
|
M xC |
= Fkx(e) |
|
|
k =1 |
|
|
N |
|
M yC |
= Fky(e) |
(4) |
|
k =1 |
|
|
N |
|
M zC |
= Fkz(e) |
|
k =1
125

3.20. Закон сохранения движения центра масс
По теореме о движении центра масс:
|
dvC |
N |
|
||
M |
= Fk(e ) |
(1) |
|||
|
|||||
|
dt |
|
k =1 |
|
|
|
|
|
N |
|
|
M xC |
= Fkx(e) |
(2) |
|||
k =1
Рассмотрим следующие частные случаи.
126

1. Пусть главный вектор всех внешних сил, действующих на точки механической системы, равен нулю, т.е.
N |
|
R(e) = Fk(e) = 0 |
(3) |
k =1
Тогда из уравнения (1):
aC =0 |
vC = const |
Если главный вектор всех внешних сил, действующих на механическую систему, равен нулю, то центр масс системы движется прямолинейно и равномерно.
127

2. Пусть проекция главного вектора всех действующих на механическую систему внешних сил на одну из осей координат (например, ось Оx) равна нулю.
N |
|
N |
|
|
|
R(e) = Fk(e) 0 |
Rx(e) = Fkx(e) = 0 |
(3) |
|||
k =1 |
|
k =1 |
=0 |
|
|
|
|
xC |
|
|
|
Тогда из равенства (2) следует, |
|
vCx |
= const. |
|
|
Если сумма проекций всех действующих на систему внешних сил на какую-нибудь ось равна нулю, то проекция скорости центра масс на эту же ось есть величина
постоянная. |
|
Если же, в частности в начальный момент, vCx = 0, то |
|
xC = const. |
128 |
|
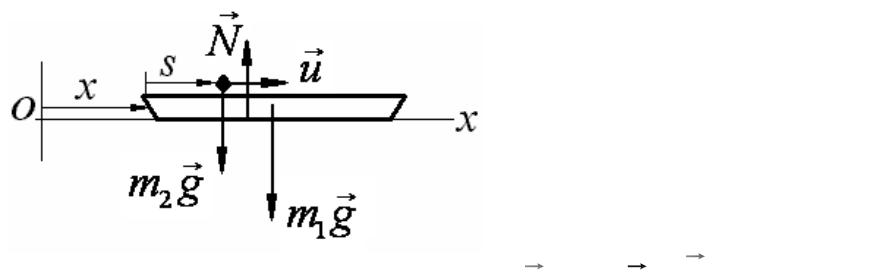
Пример 3.4.
m1 - масса лодки m2 – масса человека u = const
s – перемещение человека
Решение. Внешние силы |
m g , m g , N |
|
||||
|
1 |
2 |
вертикальны |
|
||
|
|
|
|
|
||
|
N |
|
= 0 |
|
|
|
|
Fkx |
|
|
|
||
Следовательно |
|
(e) |
и |
|
|
|
|
k =1 |
|
Qx0 |
=Qx |
|
|
|
|
|
(1) |
|||
|
|
|
|
|
|
|
129
В начальный момент |
|
Qx0 =0 |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
||||
В текущий момент |
|
|
|
|
|
|
|
|
|
|
|||
Qx = m1 v + m2 (v + u) = 0, |
|
|
|
|
|
|
|||||||
откуда |
|
v = − |
|
|
|
m2 |
u |
|
|
||||
|
|
m1 + m2 |
|
|
|||||||||
Скорость лодки: |
|
v = |
dx |
= − |
m2 |
|
ds |
||||||
|
|
dt |
|
m1 +m2 |
|
dt |
|||||||
Откуда: |
|
|
|
m2 |
|
|
|
|
|
|
|||
x |
= − m1 + m2 |
s |
|
|
|
||||||||
|
|
|
|
||||||||||
(2)
(3)
(4)
(5)
130