

4519
.pdf31
Если сделать замер до третьего спутника, то полученный радиус-вектор не пересечется с двумя другими, как показано на рис. 20.
Когда GPS приемник получает серию измерений, которые не пересекаются в одной точке, то компьютер в приемнике начинает вычитать (или добавлять) время методом последовательных итераций до тех пор, пока не сведет все измерения к одной точке. После этого вычисляется поправка и делается соответствующее уравнивание.
|
Если требуется третье изме- |
|||
|
рение, то необходим четвер- |
|||
|
тый спутник для устранения |
|||
|
ошибок хода часов в прием- |
|||
|
нике. Таким образом, при ра- |
|||
|
боте |
в поле |
необходимо |
|
|
иметь минимум четыре спут- |
|||
|
ника, |
чтобы |
определить |
|
|
трехмерные координаты объ- |
|||
|
екта (рис. 21). |
|
||
Рис. 20. Использование данных трех спутников |
|
|
|
|
с разным ходом часов на спутниках и прием- |
Расположение спутников |
|||
нике |
||||
|
|
|
||
|
|
Система |
NAVSTAR |
|
|
GPS имеет 31 рабочий спут- |
|||
|
ник (март 2010 г.) с орби- |
|||
|
тальным периодом в 12 часов |
|||
|
на высоте примерно 20200 км |
|||
|
от поверхности Земли. В шес- |
|||
|
ти различных |
плоскостях, |
||
|
имеющих наклон к экватору в |
|||
|
55°, расположено по 4 спут- |
|||
|
ника. Указанная высота необ- |
|||
|
ходима для обеспечения ста- |
|||
Рис. 21. Использование данных трех спутников |
бильности орбитального дви- |
|
жения спутников и уменьше- |
||
с разным ходом часов на спутниках и прием- |
||
ния фактора влияния сопро- |
||
нике |
||
тивления атмосферы. |
||
|
||
|
Министерство Обороны |
США осуществляет непрерывное слежение за спутниками. На каждом спутнике расположено несколько высокоточных атомных часов, и они непрерывно передают радиосигналы с собственным уникальным идентификационным кодом. Министерство Обороны США имеет 4 станции слежения за спутниками, три

32
станции связи и центр, осуществляющий контроль и управление за всем наземным сегментом системы. Станции слежения непрерывно отслеживают спутники и передают данные в центр управления. В центре управления вычисляются уточненные координаты спутниковых орбит и коэффициенты поправок спутниковых шкал времени, после чего эти данные передаются по каналам станций связи на спутники по крайней мере один раз в сутки.
Коррекция ошибок
Некоторые источники ошибок, возникающих при работе GPS, являются трудноустранимыми. Вычисления предполагают, что сигнал распространяется с непрерывной скоростью, которая равна скорости света. Однако в реальности все гораздо сложнее. Скорость света является константой только в вакууме. Когда сигнал проходит через ионосферу (слой заряженных частиц на высоте 130290 км) и тропосферу, его скорость распространения уменьшается, что приводит к ошибкам в измерениях дальности. В современных GPS приемниках используют всевозможные алгоритмы устранения этих задержек.
Иногда возникают ошибки в ходе атомных часов и орбитах спутников, но они обычно незначительны и тщательно отслеживаются со станций слежения.
Многолучевая интерференция также вносит ошибки в определение местоположения с помощью GPS. Это происходит, когда сигнал отражается от объектов, расположенных на земной поверхности, что создает заметную интерференцию с сигналами, приходящими непосредственно со спутников. Специальная техника обработки сигнала и продуманная конструкция антенн позволяет свести к минимуму этот источник ошибок.
Недостатки системы GPS
Общим недостатком использования любой радионавигационной системы является то, что при определенных условиях сигнал может не доходить до приемника или приходить со значительными искажениями или задержками. Например, практически невозможно определить свое точное местонахождение в глубине квартиры внутри железобетонного здания, в подвале или в тоннеле. Так как рабочая частота GPS лежит в дециметровом диапазоне радиоволн, уровень приема сигнала от спутников может серьезно ухудшиться под плотной листвой деревьев или из-за очень большой облачности. Нормальному приему сигналов GPS могут повредить помехи от многих наземных радиоисточников, а также от магнитных бурь.
Невысокое наклонение орбит GPS (примерно 55 ) серьезно ухудшает точность в приполярных районах Земли, так как спутники GPS невысоко поднимаются над горизонтом.
Существенной особенностью GPS считается полная зависимость условий получения сигнала от Министерства обороны США. Во время боевых действий гражданский сектор GPS может быть отключен.
33
2.Изучение системы GPS
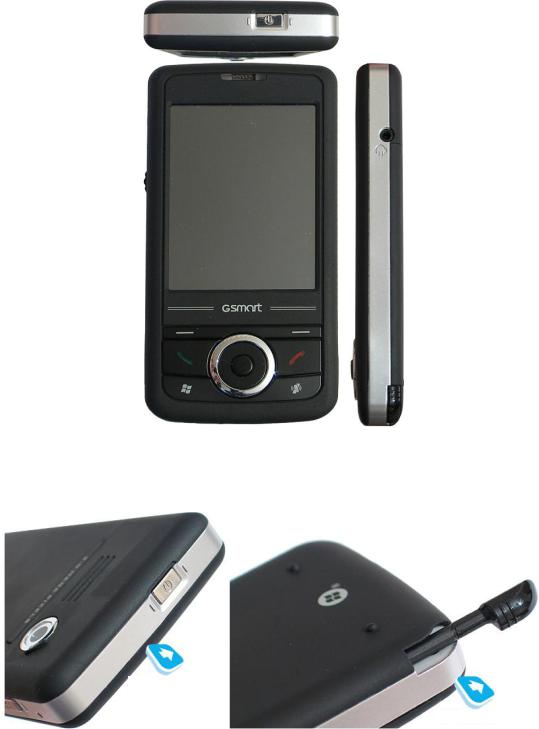
Влабораторной работе требуется изучить работу GPS приемника в виде коммуникатора Gigabyte MW700 (рис. 22) с программой Навител Навигатор 3.
Рис. 22. Внешний вид коммуникатора Gigabyte MW700
Включение и выключение коммуникатора осуществляется кнопкой в верхнем торце аппарата
Управление аппаратом осуществляется с помощью пера.
Спутниковая навигация GPS осуществляется GPS-чипом SiRF Star III. Время холодного старта приемника в Gigabyte MW700 составляет 2 минуты.

34
При движении время холодного страта увеличивается в несколько раз. На прием сигнала уходит, как правило, от 10 до 25 секунд на улице. Точность приема 1-2 метра.
В качестве навигационного ПО используется программа Навител Навигатор 3 (NaviTel).
Навител Навигатор 3 – уникальная и точная система навигации, которая отображает текущее местоположение пользователя на карте и способна голосом подсказывать водителю (пешеходу), когда и куда необходимо повернуть на автоматически проложенном маршруте, предсказать время прибытия в точку назначения, сообщить актуальную скорость движения, а также поддерживает многие другие навигационные функции.
Основные возможности «Навител Навигатор»:
1. «Навител. Пробки» – бесплатный сер-
вис по всей России. Все пользователи системы Навител Навигатор являются активными участниками определения дорожных заторов и сво-
бодных дорог. При включенном сервисе Пробки данные о скорости передвижения автомобиля собираются и передаются в аналитический центр, где эти сведения обрабатываются и предоставляются пользователям программы в виде обозначенных на карте «пробок».
2.Поиск – «найдется ВСЕ». Поиск по картам осуществляется по принципу «найдется ВСЕ», с учетом российской специфики адресации (корпуса, строения, владения, двойная адресация и т.д.). Зная точный адрес, пользователи Навител Навигатор легко найдут его на карте города, а предсказательная система поиска позволит еще быстрее и удобнее набирать названия улиц и городов на телефонной клавиатуре.
3.Маршруты. Одной из главных функций навигационной системы является построение маршрутов для движения по городу и вне города. В программе Навител Навигатор реализован гибкий алгоритм построения маршрутов, позволяющий пользователю строить маршруты с учетом собственных предпочтений.
4.«SPEEDCAM». Известно, что на наиболее опасных участках дорог России все чаще устанавливаются системы контроля скорости (SPEEDCAM). Для того чтобы вовремя предупредить водителя о приближении к опасному участку, разработана система заблаговременных оповещений. Благодаря этой технологии, водитель заранее получит информацию о приближении к опасному участку и сможет вовремя снизить скорость движения.

35
5. «Навител SMS». Этот сервис позволяет отправлять SMS с координатами вашего местоположения. Получатель SMS может посмотреть место на карте с координатами, переданными в SMS, и проложить к нему маршрут.
Аппаратные требования:
1.Pocket PC 2003, 2003 SE, Windows Mobile 5.0, 6.0 и выше; Android OS 1.5 и выше; Symbian S60 5th Edition;
2.От 14 МБ оперативной памяти (в зависимости от загруженной карты);
3. Сенсорность и режимы: VGA (640×480), QVGA (240×320), WVGA (800×480), разрешение 240×240;
4.GPS-приемники: поддержка протоколов NMEA-0183, SiRF binary и Garmin; внешний приѐмник может подключаться через последовательный порт, USB, BlueTooth, разъѐмы CompactFlash, SDIO.
Коммуникатор Gigabyte MW700, работающий под управлением Windows Mobile 6.1, имеющий сенсорный QVGA (240x320) экран, 20 Мб свободной оперативной памяти, GPS-чип SiRF Star III, соответствует требованиям к аппарат-
ному обеспечению Навител Навигатор 3.
3. Проведение работы
При включении коммуникатора Gigabyte MW700, пользователю доступен рабочий стол Windows Mobile 6.
Рис. 23. Рабочий стол Windows Mobile. Карта Навител Навигатор
36
Для загрузки программы Навител следует нажать правую нижнюю кноп-
ку  коммуникатора. После загрузки отображается окно программы с картой.
коммуникатора. После загрузки отображается окно программы с картой.
Сверху на экране находятся значки выбора режима отображения карты (2D, 3D, ночной или дневной режимы), включение и отключение громкости, уровень заряда батареи, активность сервиса «Навител Пробки» и иконка для отправления сообщения с Вашими текущими координатами выбранному адресату. В правом углу – значение скорости. Блок слева снизу позволяет менять угол наклона карты (если Вы находитесь в режиме 3D), а также начать поиск требуемого адреса. Блок справа снизу – функция масштабирования карты и переход в меню настроек. По умолчанию в дневном режиме основные дороги отображаются бледно-желтым цветом, второстепенные – белым, а дворовые проезды – серым. Фон светло-серый, а здания темно-серые. Лесопарки отмечены бледно-зелеными участками.
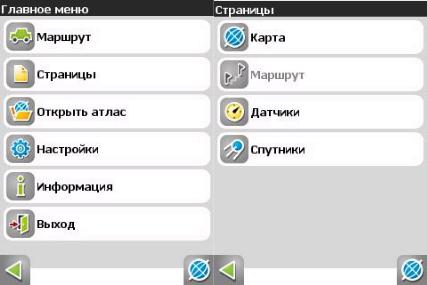
При нажатии на иконку в нижнем правом углу открывается Главное меню (рис. 24). Подменю Страницы состоит из пунктов: карта, маршрут, датчики, спутники. Меню Датчики (рис. 25) содержит:
1.Значение текущей скорости движения;
2.Величина пройденного пути;
3.Среднюю скорость движения;
4.Время движения;
5.Максимальную скорость перемещения;
6.Одометр – прибор для измерения количества оборотов колеса;
7.HDOP – параметр снижения точности в горизонтальной плоскости.
8.Высота над уровнем моря;
9.Текущее время;
10.Состояние аккумулятора коммуникатора.
Рис. 24. Главное меню Навител Навигатор

37
Рис. 25. Меню «Датчики»
Сброс датчиков осуществляется нажатием пером или пальцем.
Подменю Спутники содержит карту и количество видимых спутников, а также широту и долготу местоположения GPS-приемника. От широты зависит продолжительность дня, от долготы местное время.
Пример координат широты и долготы для г. Воронежа, ул. Морозова:

 Широта
Широта
 51.722735°
51.722735°
 Долгота
Долгота
 39.220419°
39.220419°
 Высота (в метрах)
Высота (в метрах)
 152
152

Рис. 26. Подменю «Спутники»
38
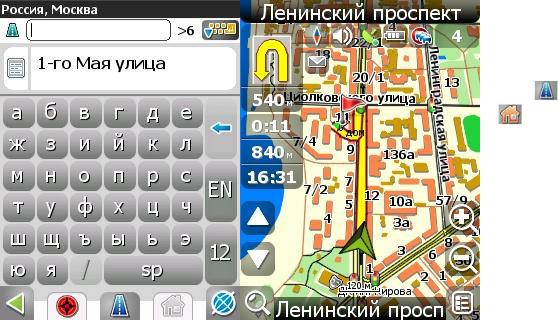
Ведение по маршруту задается различными способами подменю Найти
( ).
).
При первом поиске адреса вначале нужно задать требуемый город, нажав пером на иконку
 внизу экрана, а уже затем начинается поиск ули-
внизу экрана, а уже затем начинается поиск ули-
цы |
( |
) |
и |
дома |
( |
). |
При |
вводе |
|
каждой |
следую- |
|||
щей |
буквы |
лиш- |
||
ние |
|
отсеиваются, |
||
так |
чтобы |
было |
||
проще |
вводить |
|||
искомый |
|
адрес. |
||
При желании ввод улицы можно остановить на сере-
дине и, открыв список, вручную найти требуемую улицу среди предложенных в списке вариантов. Ввод названий и адресов производится с помощью фирменной клавиатуры навигационной программы. После прокладки маршрута весь путь отмечается маркером на карте, а слева сверху на экране появляется дополнительный блок данных: иконка ближайшего маневра (порот, разворот и т.д.), оставшееся до точки назначения расстояние и текущее время. В верхней части экрана также отображается улица, по которой Вы движетесь в данный момент, а в нижней – направление движения.
Для сброса ведения маршрута следует нажать на иконку ближайшего ма-
невра и выбрать Выключить ведение.
Подменю Путевые точки предназначено для прокладки маршрута между точками на карте, отмеченными пользователем. Для задания путевой точки
следует нажать пером на карте и на значке  внизу экрана. В подменю Путевая точка задается название точки и отображаются ее широта и долгота. Отме-
внизу экрана. В подменю Путевая точка задается название точки и отображаются ее широта и долгота. Отме-
тив вторую точку и нажав на значок  , получим проложенный маршрут. Индивидуальное задание выполняется группой студентов и включает в
, получим проложенный маршрут. Индивидуальное задание выполняется группой студентов и включает в
себя следующие действия:
1.Подготовка GPS-приемника к работе: включение коммуникатора Gigabyte MW700 и загрузка навигационного ПО Навител Навигатор 3.
2.Сброс всех датчиков Навител Навигатор 3 (подменю Датчики).
3.Выход на начальную точку пути (ул. Морозова, д. 4).
4.Определение времени холодного старта GPS-приемника – требуется замерить время до установления связи со спутниками.
39
5.Запись количества используемых спутников, широты/долготы начальной точки, схема расположения видимых спутников (подменю Спутники).
6.Отметка первой путевой точки на карте (начальная точка).
7.Добавление второй точки по заданию преподавателя (N51.72441, E39.22626) и создание проложенного маршрута.
8.Рисование схемы местности и проложенного пути.
9.Следование ко второй путевой точке согласно проложенному пути.
10.На месте второй путевой точки записывание данных всех датчиков Навител Навигатор 3 (подменю Датчики), а также количества используемых спутников, широты/долготы второй точки, схемы расположения видимых спутников (подменю Спутники).
11.Рисование схемы местности вокруг второй путевой точки.
12.Задание третьей путевой точки по адресу (N51.72339, E39.22092), предложенному преподавателем, и создание проложенного маршрута.
13.Повторение пунктов 8-10 для третьей путевой точки.
4.Задание по работе
4.1.Изучить теоретические сведения принципов работы системы глобального позиционирования GPS.
4.2.Ознакомиться с управлением коммуникатора Gigabyte MW700.
4.3.Изучить работу навигационного ПО Навител Навигатор 3 (NaviTel).
4.4.Выполнить ведение по маршруту по заданию преподавателя.
5.Содержание отчета
5.1.Теоретические сведения вычисления координаты для места на поверхности.
5.2.Сведения о передаваемых данных со спутника GPS.
5.3.Краткие сведения о недостатках GPS.
5.4.Время холодного старта GPS-приемника. Карты местности, данные датчиков, координаты путевых точек.
5.5.Фотографии местности путевых точек.
6.Контрольные вопросы
6.1.Состав системы GPS.
6.2.Определение местоположения приемника по данным со спутников
GPS.
6.3.Использование данных четвертого спутника.
6.4.Недостатки системы GPS.
6.5.Функциональные возможности Навител Навигатор 3.
40
10-00
Библиографический список
Основная литература
1.Жила, В. А. Автоматика и телемеханика систем газоснабжения [Текст] : учеб. / В. А. Жила. – М. : Инфра-М, 2007. – 238 с.
2.Петровский, В. С. Автоматизация технологических процессов и
производств в деревообрабатывающей отрасли [Текст] : учеб. / В. С. Петровский, А. Д. Данилов. – Воронеж, 2010. – 432 с.
Дополнительная литература
3.Данилов, А. Д. Технические средства автоматизации [Текст] : учеб. пособие / А. Д. Данилов. – Воронеж, 2007. – 340 с.
|
Оглавление |
|
Лабораторная работа № 1. Стационарный передатчик Риф Ринг RR-701TS........ |
3 |
|
Лабораторная работа № 2. |
Приемник Риф Ринг RR-701R.................................... |
12 |
Лабораторная работа № 3. |
Изучение датчиков систем сигнализации................. |
21 |
Лабораторная работа № 4. Изучение глобальной системы |
|
|
позиционирования GPS............................................................................................ |
|
27 |
Библиографический список..................................................................................... |
40 |
|